使用控制器
您应首先将控制器与运行 RoboDK 的设备连接。该插件将特定的机器人动作和设置映射到标准手柄输入。默认映射是针对 Xbox One 控制器创建的。
注意:游戏控制器插件支持多种控制器。您也可以通过RoboDK 驱动器手动操控真实机器人。
移动控制
点击工具栏中的“启动游戏控制器”图标,或依次选择“连接”>“游戏控制器”>“启动游戏控制器”。这将启动该插件,并自动尝试检测已连接的控制器。再次点击“启动游戏控制器”图标可停止该插件。
注意:状态更新将显示在屏幕底部的 RoboDK 状态栏中。
要移动机器人,您必须先选择一个轴,然后使用方向键进行移动。
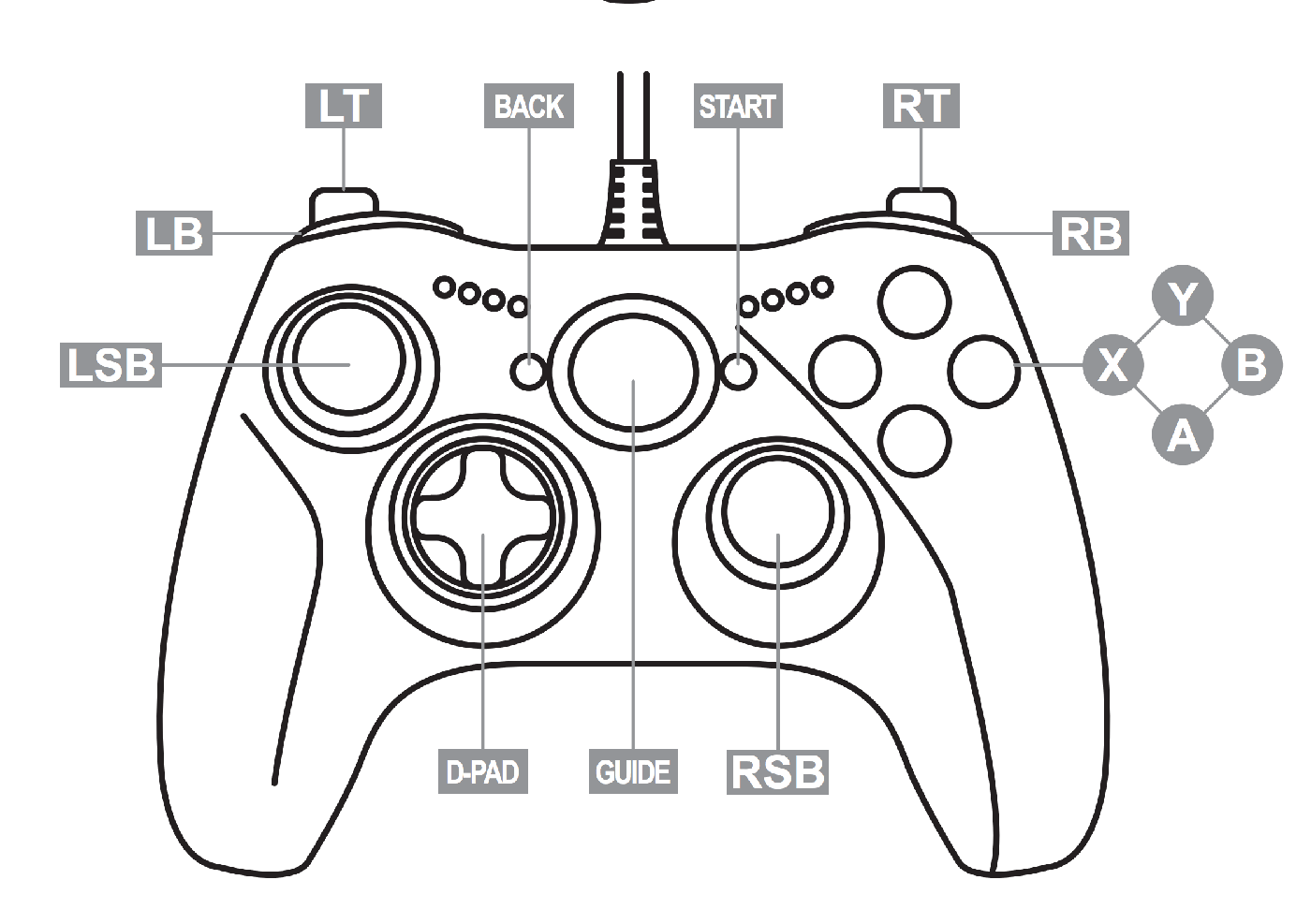
1.选择 X 轴:按住手柄上的X 键。
2.选择 Y 轴:按住控制器上的 Y 键。
3.选择 Z 轴:按住控制器上的 B 键。
4.移动:按住轴按钮的同时,使用方向键上或下,使机器人沿选定轴移动。
切换
游戏控制器插件提供了一些切换按钮,用于自定义行为。
其他用于控制机器人运动的选项包括:
1.位移与旋转:按下左摇杆按钮(LSB)可在机器人线性移动(mm)和旋转(deg)之间切换。默认使用位移(mm)。
2.MoveJ 与 MoveL:按下右摇杆按钮 (RSB) 在关节运动 (MoveJ) 和线性运动 (MoveL) 之间切换。默认运动指令为 MoveJ。
3.步长:使用方向键左右键可增大或减小移动步长。
4.原点位置:在启用安全防护时同时按下两个肩键(LB + RB),将机器人返回原点位置。