IsaacSim Bridge 插件
IsaacSim Bridge插件用于RoboDK,可将IsaacSim场景与RoboDK连接,简化真实机器人的连接流程或根据需求生成机器人程序。该扩展还实现了RRT运动规划器,支持将IsaacSim中无碰撞路径导出至RoboDK程序。
RoboDK为IsaacSim中的工业机器人增添后处理功能,可为80个品牌共1200款工业机器人生成可直接投入生产的机器人程序。
安装
您需从资源库安装Isaac Sim Bridge插件。该插件在RoboDK软件中默认处于禁用状态。
要在IsaacSim中安装扩展程序,您必须先安装RoboDK Python API模块。请按以下步骤操作:
1.打开IsaacSim选择器。
2.点击“在终端中打开”。
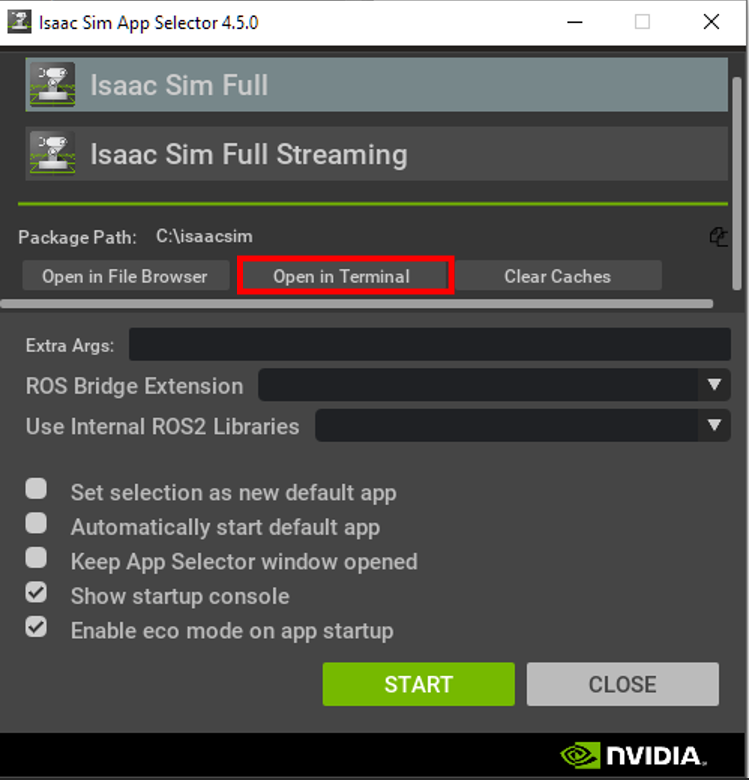
运行以下命令:pip install RoboDK
安装完 RoboDK 包后,即可通过以下步骤在 IsaacSim 中安装扩展程序:
1.在RoboDK中安装插件。
2.在文件管理器中打开插件所在位置。
3.复制RoboDK.Bridge文件夹(内含IsaacSim扩展程序)。
4.将其粘贴至IsaacSim安装目录下的extsUser文件夹内。
5.启动IsaacSim并打开扩展管理器。
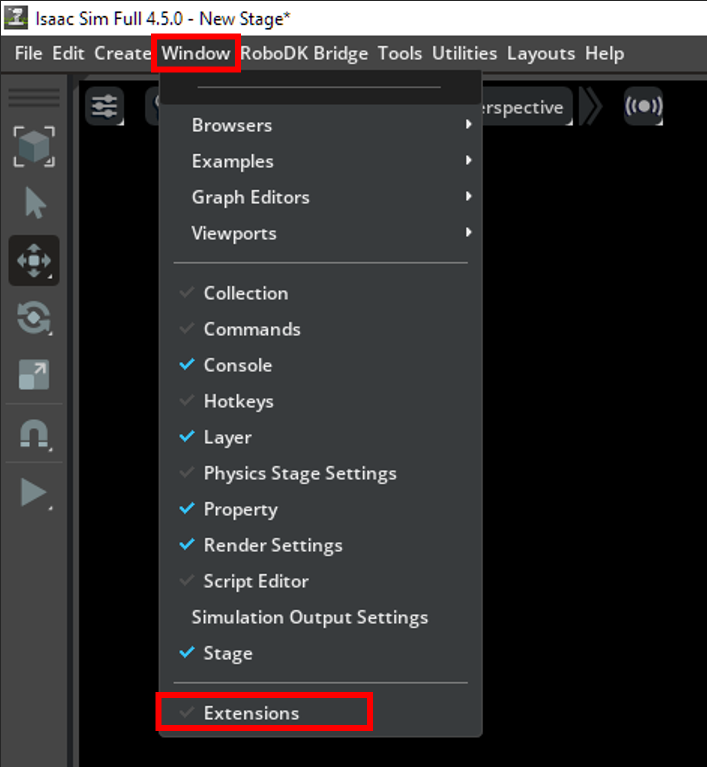
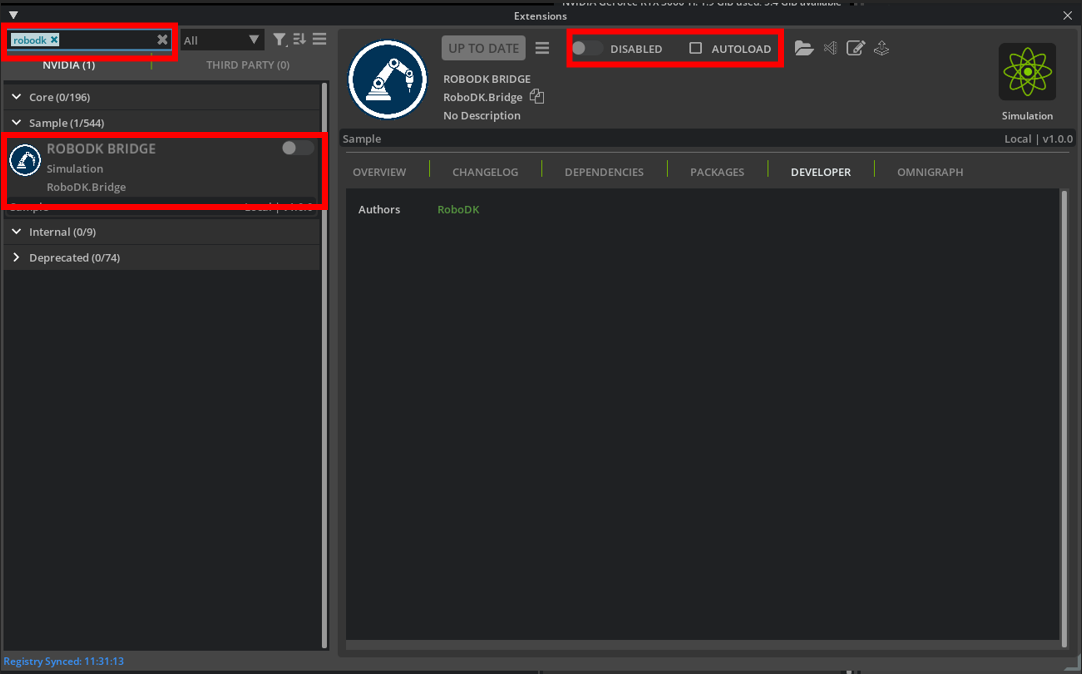
6.在搜索栏中查找RoboDK。
7.启用该扩展程序,并可选择性激活自动加载功能。
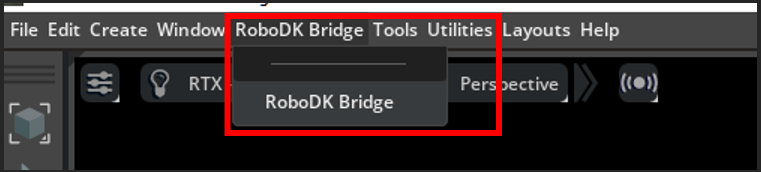
8.RoboDK Bridge 现已显示在 IsaacSim 工具栏中,可直接打开。
IsaacSim 桥接功能
本节展示IsaacSim中基础的IsaacSim Bridge插件功能。
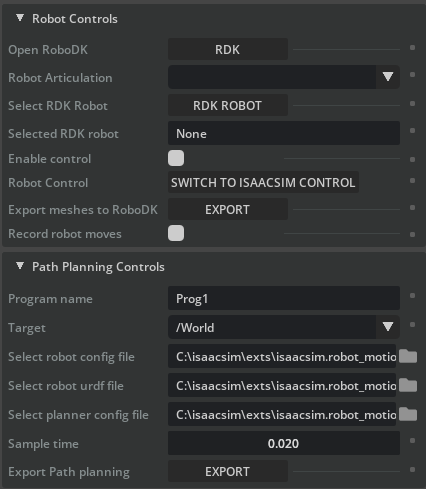
IsaacSim Bridge扩展窗口包含以下功能模块:
1.机器人控制
a.打开RoboDK:若RoboDK未运行则启动程序,若已运行则连接至当前实例。此功能为扩展运行必需。
b.机器人关节:选择IsaacSim中要使用的关节。
c.选择RDK机器人:在RoboDK工作站中选择要使用的机器人。
d.已选RDK机器人:显示当前选定机器人的名称。
e.启用控制:启用IsaacSim场景与RoboDK工作站间的机器人通信。
f.机器人控制:选择作为匹配对象的参考机器人。若显示"切换至IsaacSim控制"选项,则RoboDK作为主控端,IsaacSim中的机器人关节将跟随所选RoboDK机器人的位姿。
g.将网格导出至RoboDK:将IsaacSim场景中的网格物体转换为3D网格文件,并加载至RoboDK工作站。转换后的物体原点将位于工作站底座处,但会进行偏移处理,确保当前位置与IsaacSim场景中的位置一致。每个来自IsaacSim的网格物体在RoboDK工作站中都将成为独立物体,可自由移动。
h.记录机器人动作:记录IsaacSim机器人执行的所有动作,并将其添加至RoboDK程序中。此功能适用于需将IsaacSim程序导出至RoboDK的情况。
2.路径规划控制
a.程序名称:导出至RDK时使用的程序名称。
b.目标:下拉菜单用于选择RRT路径规划器的目标XForms模型。
c.选择机器人配置文件:选择用于路径规划的机器人配置文件。文件格式必须为yaml。
d.选择机器人URDF文件:选择用于路径规划的机器人定义文件。文件格式必须为URDF。
e.选择规划器配置文件:选择用于路径规划的规划器配置文件。文件格式必须为yaml。
f.采样时间:选择生成路径时使用的采样时间。较短的采样时间将导致程序中包含更多MoveJ指令,且指令间步长更小。
g.路径规划导出:使用RRT算法计算当前机器人位姿与选定目标点之间的路径,并生成包含完成路径指令列表的机器人程序。