3
你可以通过指定法兰半径、侧面和水平偏移、高度以及底座、横梁和法兰的颜色等参数来创建3轴定位器。
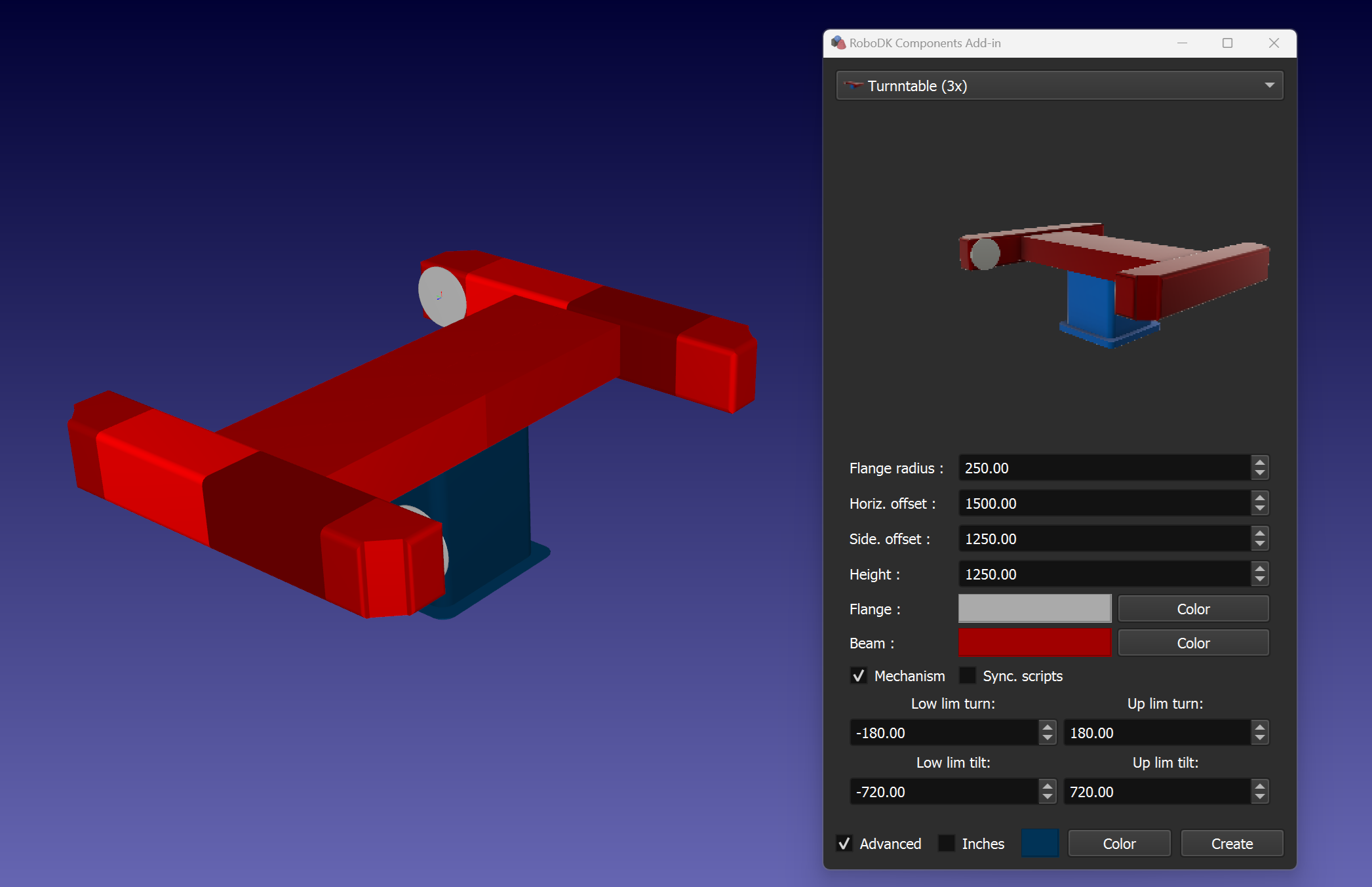
Tip:使用Mechanism 复选框创建三轴定位器机械结构。你还可以使用相应参数设置运动限制。
Tip:使用Sync. scripts复选框可创建额外的 Python 脚本,通过运行相应的脚本使机器人与所需的水平轴同步。
Note:默认情况下,C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ 是包含同步脚本示例的文件夹。
你可以通过指定法兰半径、侧面和水平偏移、高度以及底座、横梁和法兰的颜色等参数来创建3轴定位器。
Tip:使用Mechanism 复选框创建三轴定位器机械结构。你还可以使用相应参数设置运动限制。
Tip:使用Sync. scripts复选框可创建额外的 Python 脚本,通过运行相应的脚本使机器人与所需的水平轴同步。
Note:默认情况下,C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ 是包含同步脚本示例的文件夹。