组件插件
RoboDK组件插件为用户提供了在RoboDK软件中创建可视化组件(3D对象与机械结构)的必要工具。
该插件允许你为创建的组件定义尺寸与配置参数,并提供预览功能以确保结果准确。
你可自由设置组件的颜色与透明度参数。
Video:RoboDK 组件插件演示:https://youtu.be/-e0881ENk9g。
插件获取路径:https://robodk.com.cn/addin/cn/com.robodk.app.shape
Note:如果你是第一次使用 RoboDK,请阅读本入门指南。
Note:本插件原名:Shape Add-in,现已更名为:Components。
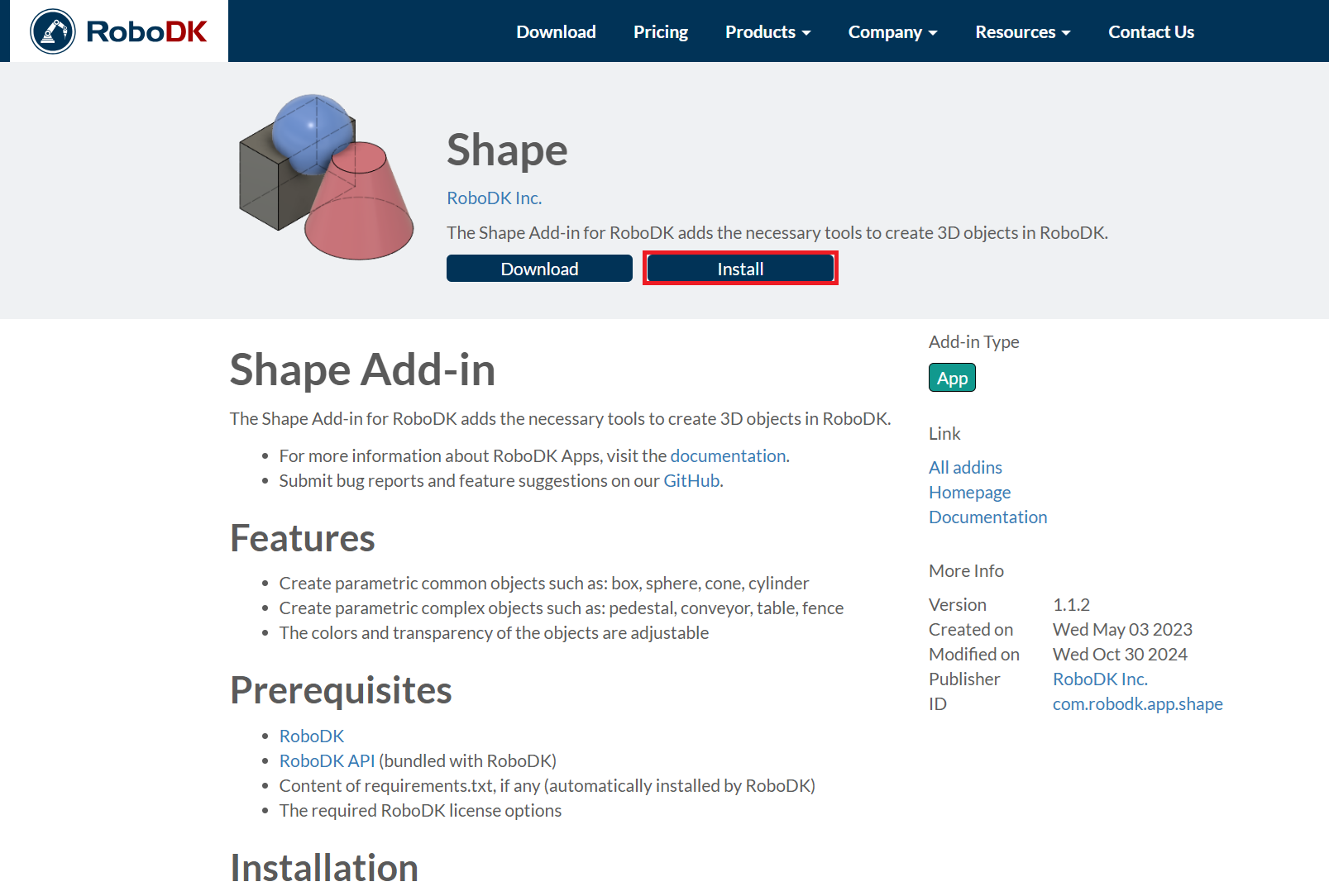
安装插件
需通过RoboDK 在线资源库安装Components组件插件。该插件在软件中默认未启用。。
核心功能
本节介绍Components插件的基本功能。
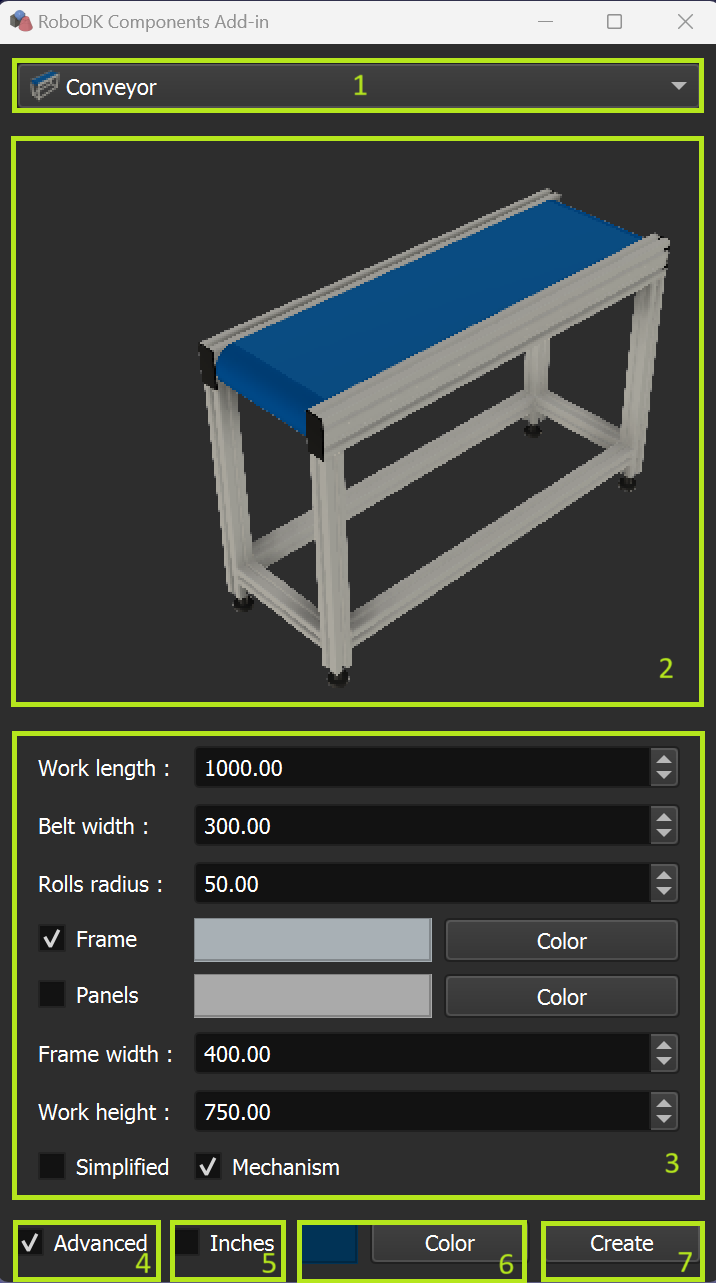
组件插件窗口包含以下功能模块:
1.组件选择列表区
2.组件草图预览
3.参数设置面板
4.高级选项显示开关
5.单位切换(默认毫米/可选英寸)
6.颜色和透明度选择
7.组件生成按钮
传送带Conveyor
通过定义尺寸参数生成传送带
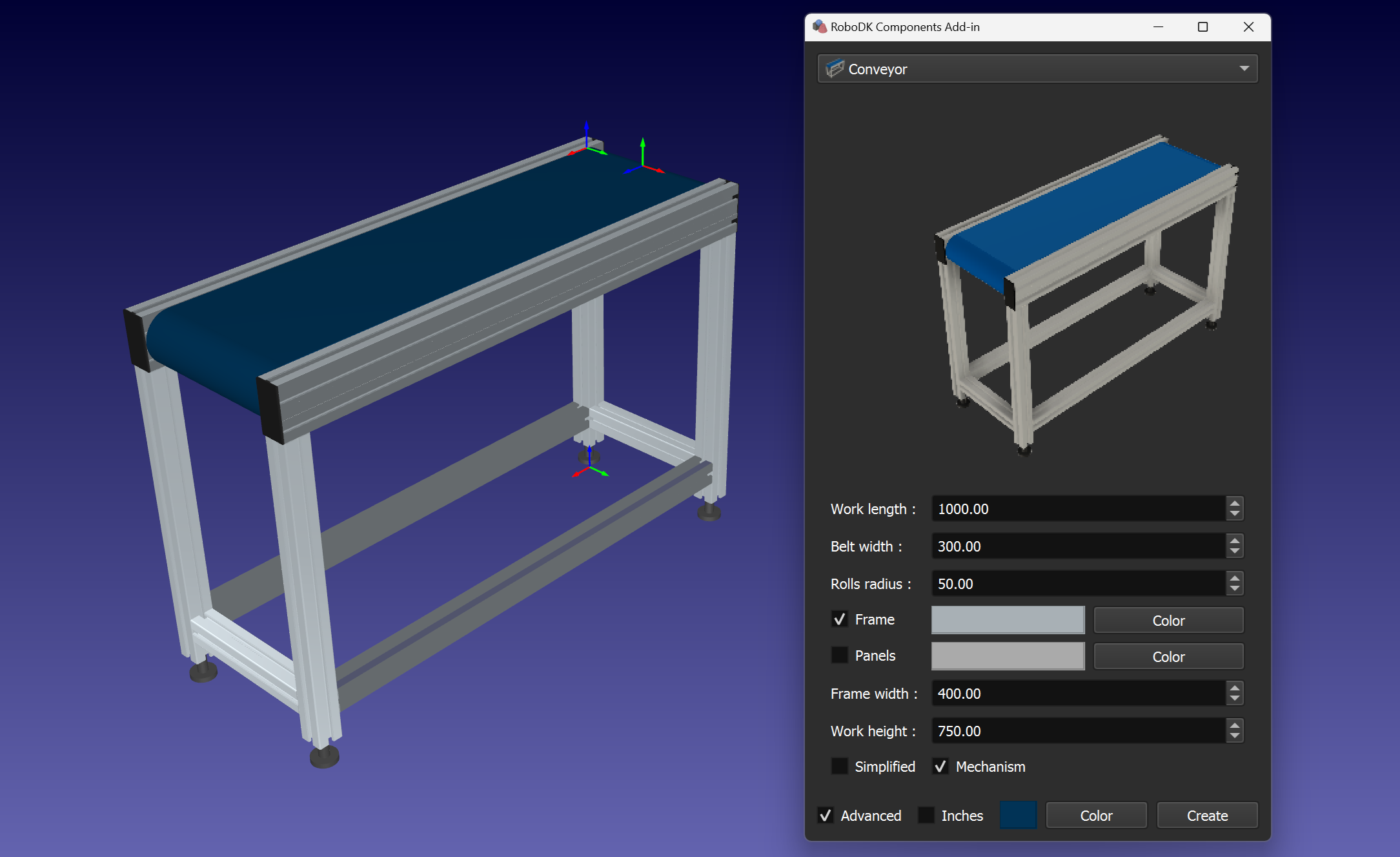
Tip:选择Frame选项,配合尺寸参数及颜色设置可添加传送带框架
Tip:选择Panel选项,用于添加指定色彩的透明挡板。
Tip:选择Simplified 切换框架显示精度。
Tip:使用Mechanism 选项生成可运动机构。
基座Pedestal
通过参数R1/R2/R3(半径)和H1/H2/H3(高度)创建基座:
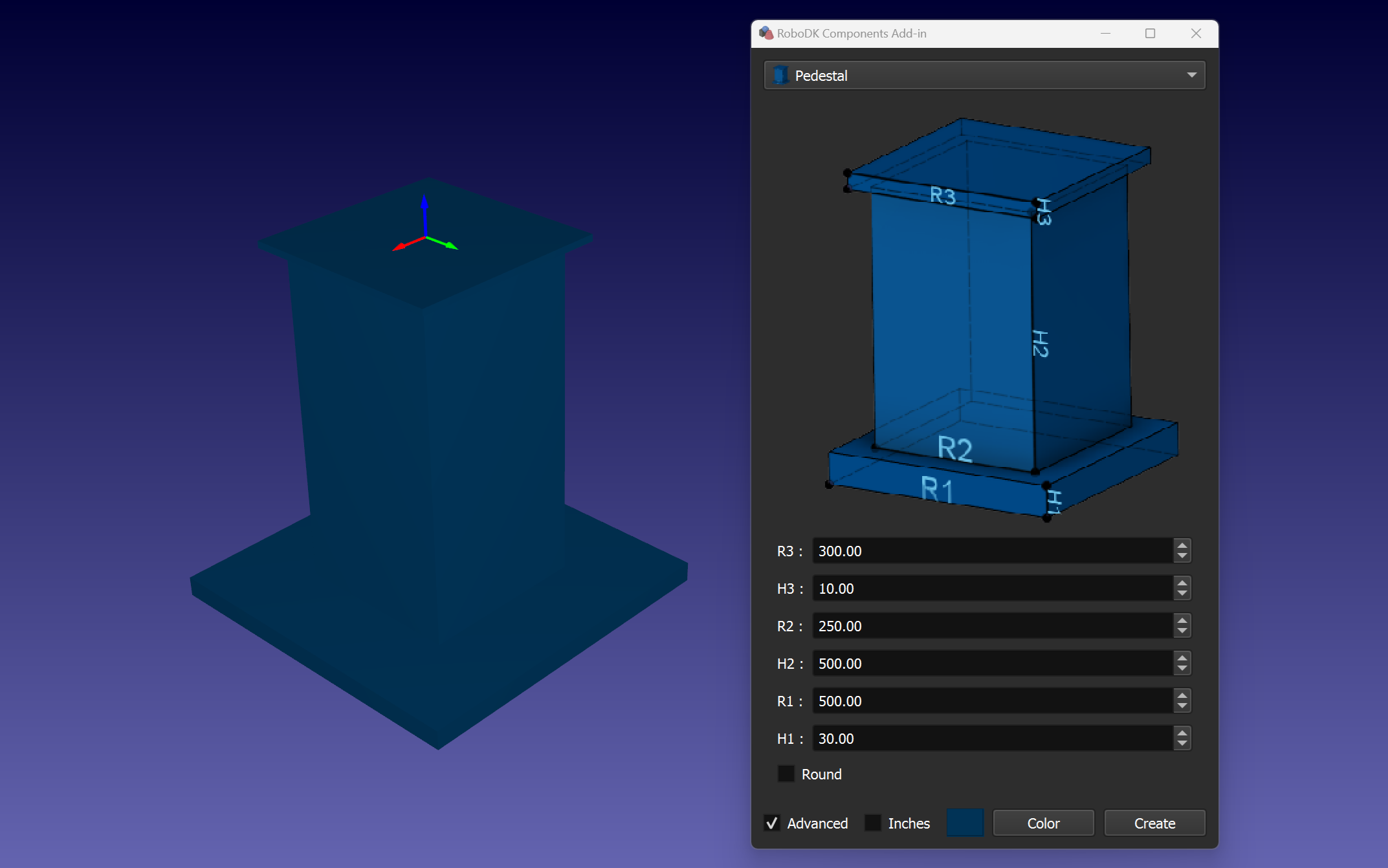
Tip:使用Round选项生成圆柱形底座。
Tip:自动生成的"Pedestal N Plane Frame"坐标系便于在基座顶面定位物体。
工作台Table
通过X/Y(长宽)、R(边缘半径)、H1/H2(高度)参数创建:
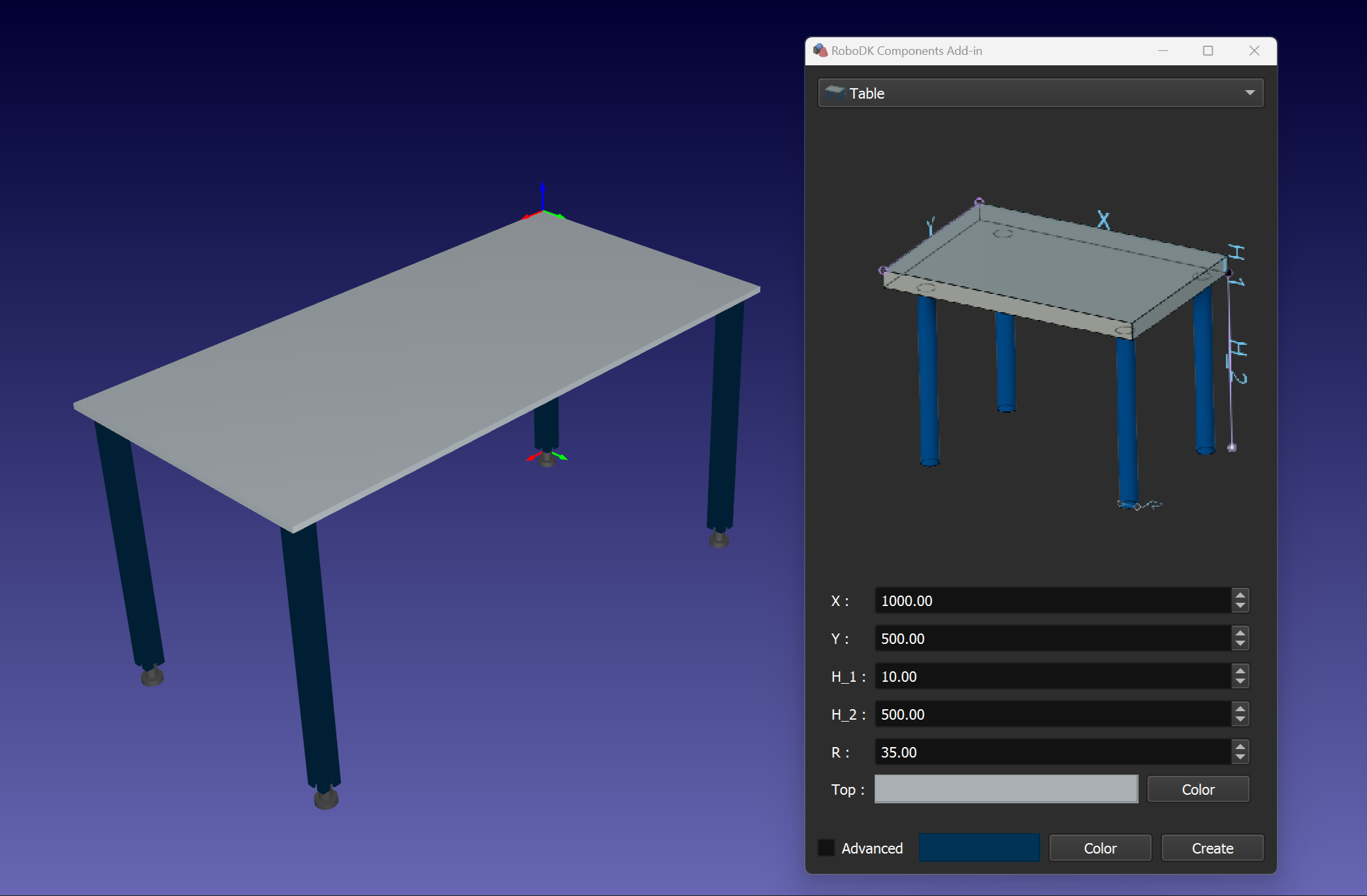
Tip:通过Color调节台面颜色与透明度。
Tip: Table N Plane Frame坐标系辅助台面物体定位。
Tip:通过Simplified 切换桌腿显示样式。
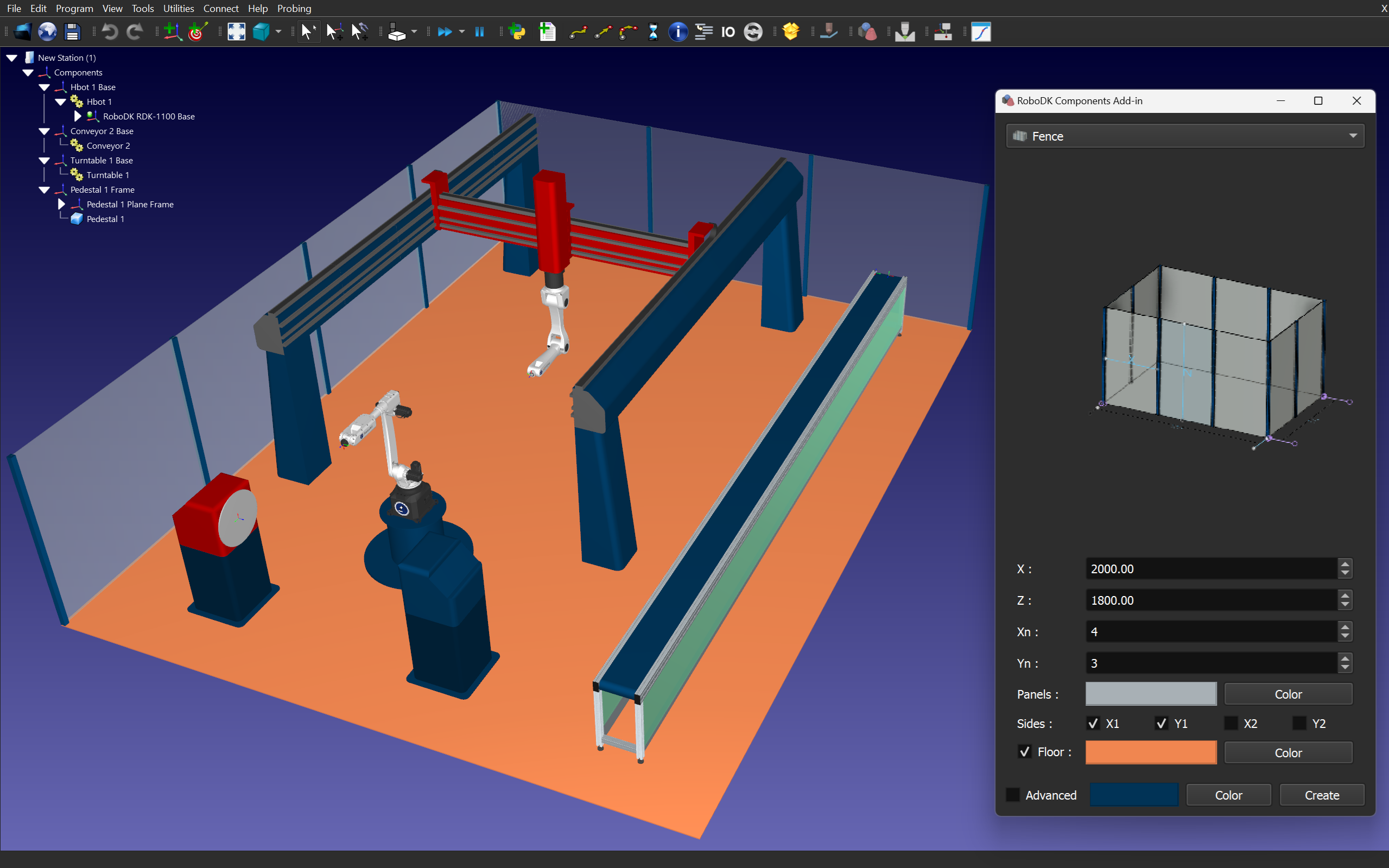
防护栏Fence
通过Xn/Yn(分段数)和X/Z(面板尺寸)参数创建:
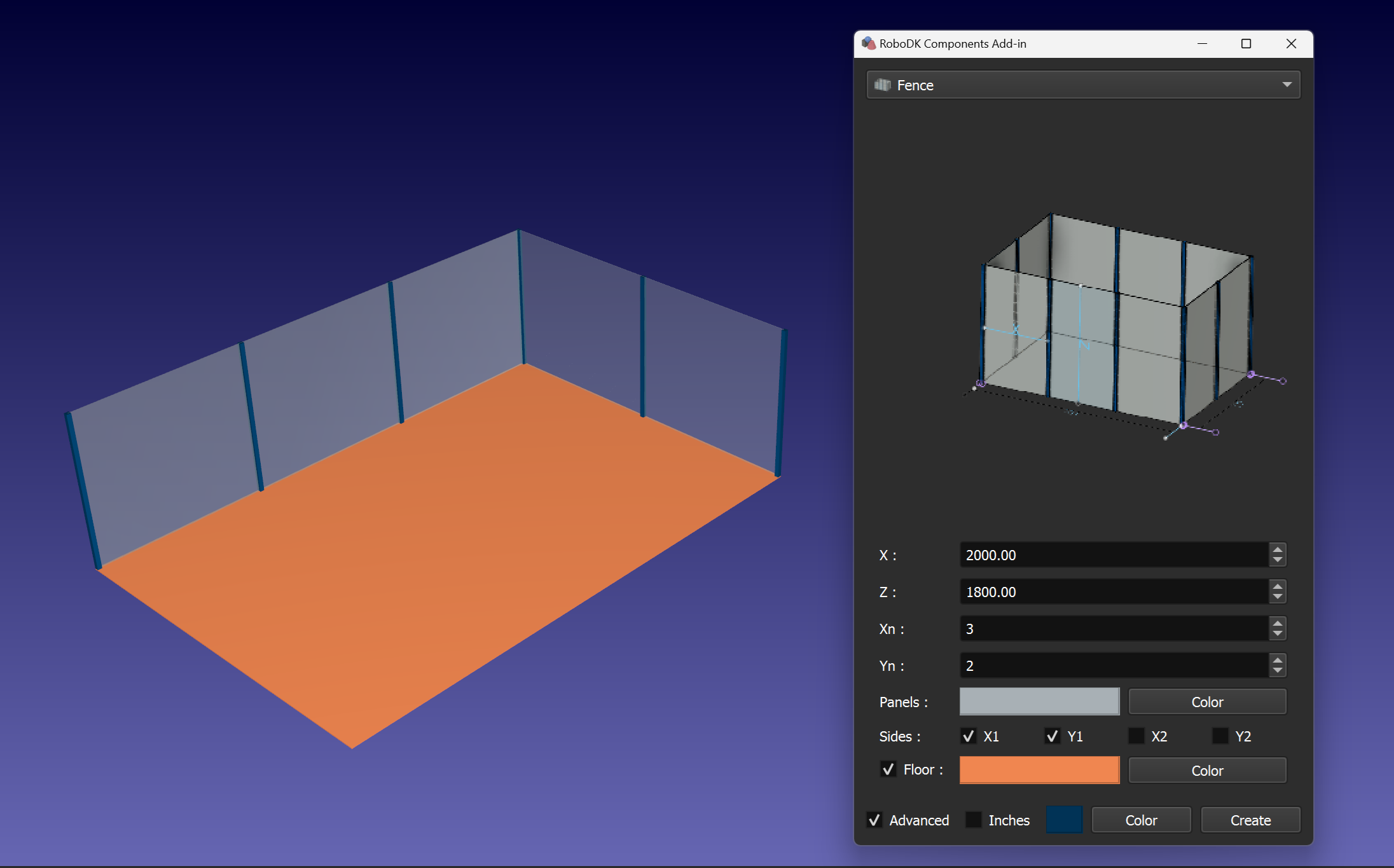
Tip:使用Color设置栅栏面板的颜色和透明度。
Tip:使用Floor复选框和相应的Color对话框,以指定的颜色和透明度添加地板。
Tip:通过X1/X2/Y1/Y2参数调整围栏布局。
导轨Rail
可定义轨道底座与滑块的尺寸及色彩:
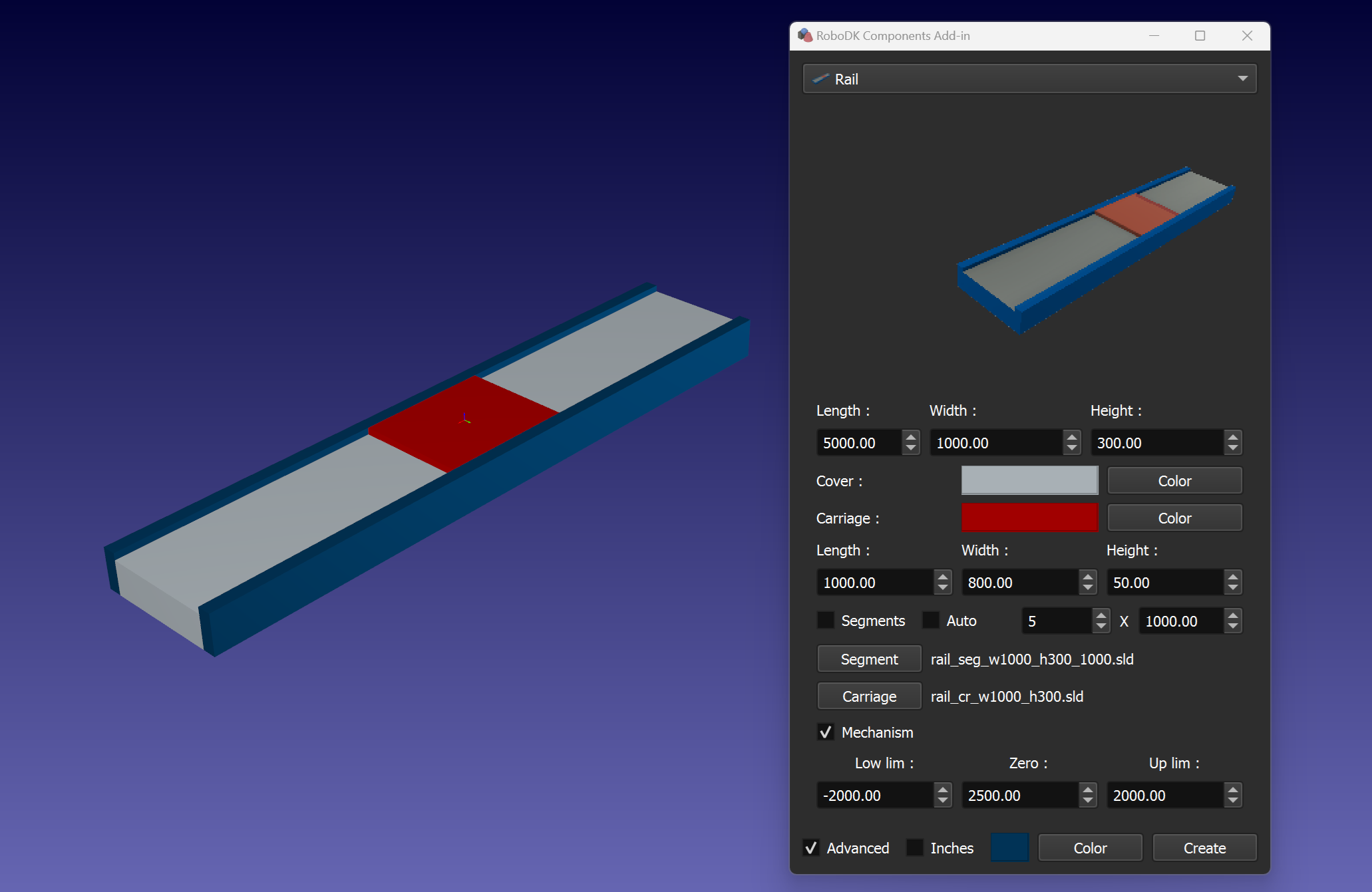
Tip:你可以使用基本段和滑块模型创建分段轨道。必须使用Segment 和 Carriage按钮设置相应的模型文件。确保使用正确的尺寸值和段数。使用Segment 复选框建立相应的轨道模型。
Tip:使用Mechanism复选框创建轨道机械结构。你还可以使用相应参数设置滑块的运动限制和零位。
Note:如果使用Segments 选项,请检查分段和滑块模型的位移。Models 文件夹中有多个示例。默认情况下,包含模型示例的文件夹是C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail\.
Tip:使用Auto复选框可根据模型边框测量结果设置参数。模型的小细节可能会影响测量结果。你可以在测量后取消选中Auto,然后手动设置参数。
T型机械臂T-bot
通过设置X轴横梁、滑块组件和Z轴的参数创建可定制化T型机械臂系统:
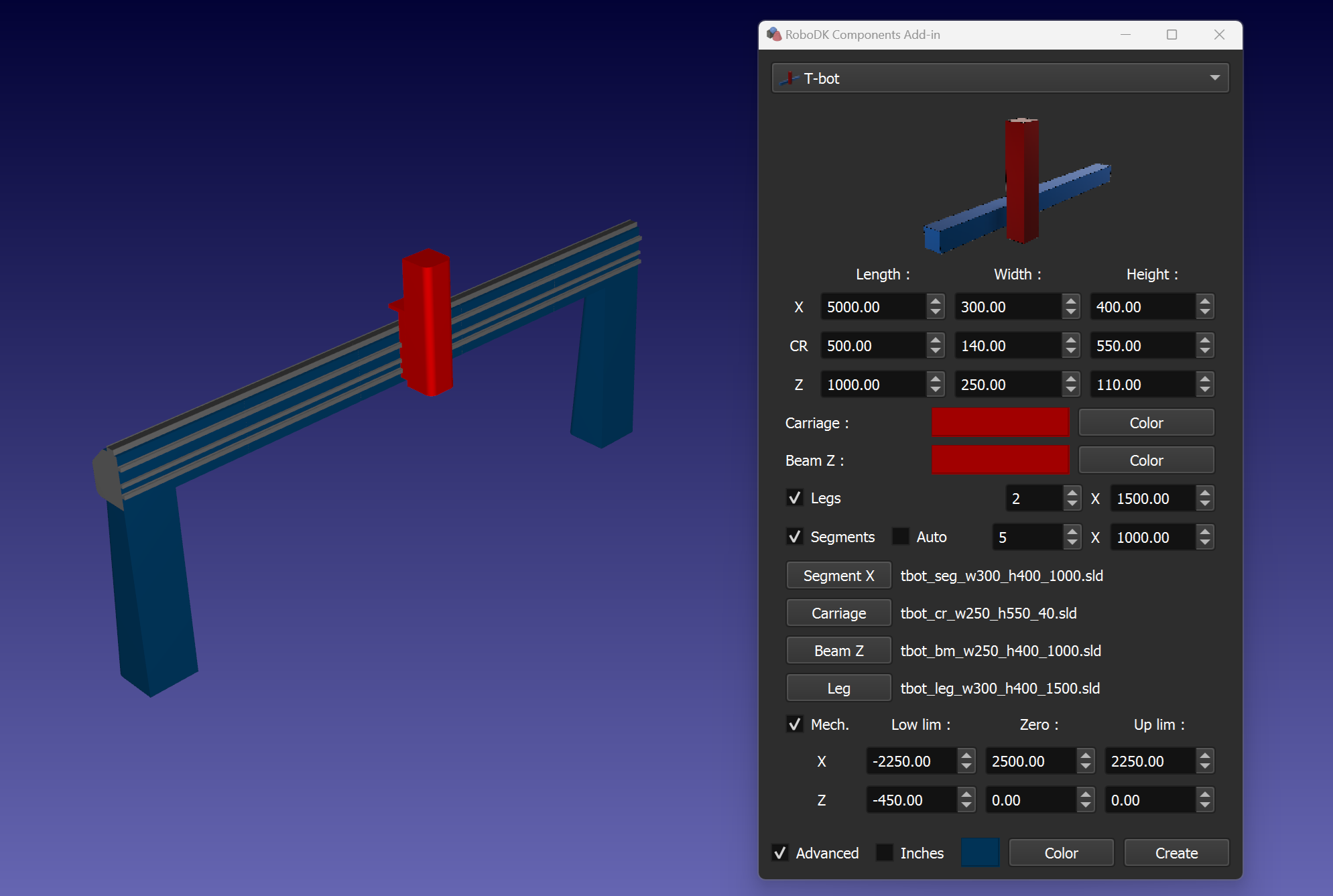
Tip:分段式横梁功能:通过"Segment X"、"Beam Z"和"Carriage"按钮导入对应模型文件,注意校验分段数量与尺寸匹配性,启用"Segments"选项构建完整结构。
Tip:运动机构生成:勾选Mechanism,可设置各轴行程限位与机械零点。
Note:如果使用Segments 选项,请检查分段、梁和滑块模型的位移。模型校准提示:使用分段功能时需检查各部件位移参数(示例模型路径:C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\)
Tip:智能参数设置:Auto选项根据模型边界框自动测算参数(建议完成自动测量后手动微调)
Tip:支撑柱配置:Legs选项添加指定高度的基座立柱
H型机械臂H-bot
通过配置X/Y/Z三轴横梁及滑块参数创建H型机械臂:
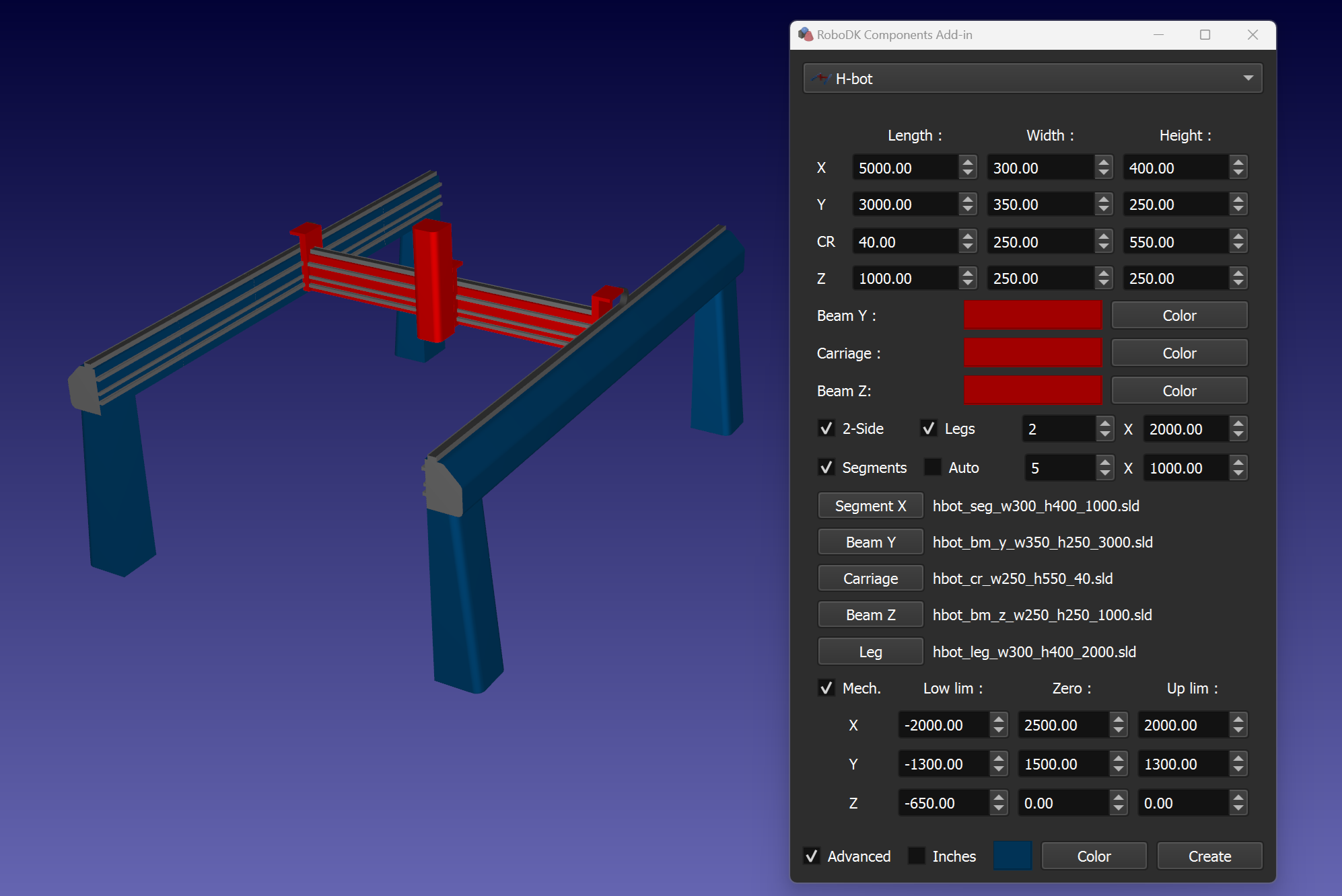
Tip:扩展分段功能:需同步导入"Segment X"、"Beam Y"、"Beam Z"及"Carriage"模型文件。
Tip:使用Mechanism 复选框创建 H-bot 机械结构。你还可以使用相应的参数设置轴的运动限制和零位。
Note:如果使用分段选项,请检查分段、梁和滑块模型的位移。模型文件夹中有多个示例。默认情况下,包含模型示例的文件夹是C:\RoboDK\插件\com.robodk.app.shape\Components\models\hbot\.
Tip:使用Auto 复选框可根据模型边框测量结果设置参数。模型的小细节可能会影响测量结果。你可以在测量后取消选中Auto ,然后手动设置参数。
Tip:使用Legs 复选框添加指定高度的所需基柱数量。
Tip:使用2-Side 复选框添加镜像 X 光束。
1轴转盘
你可以通过指定法兰半径、底座高度以及底座和法兰的颜色等参数来创建转盘。
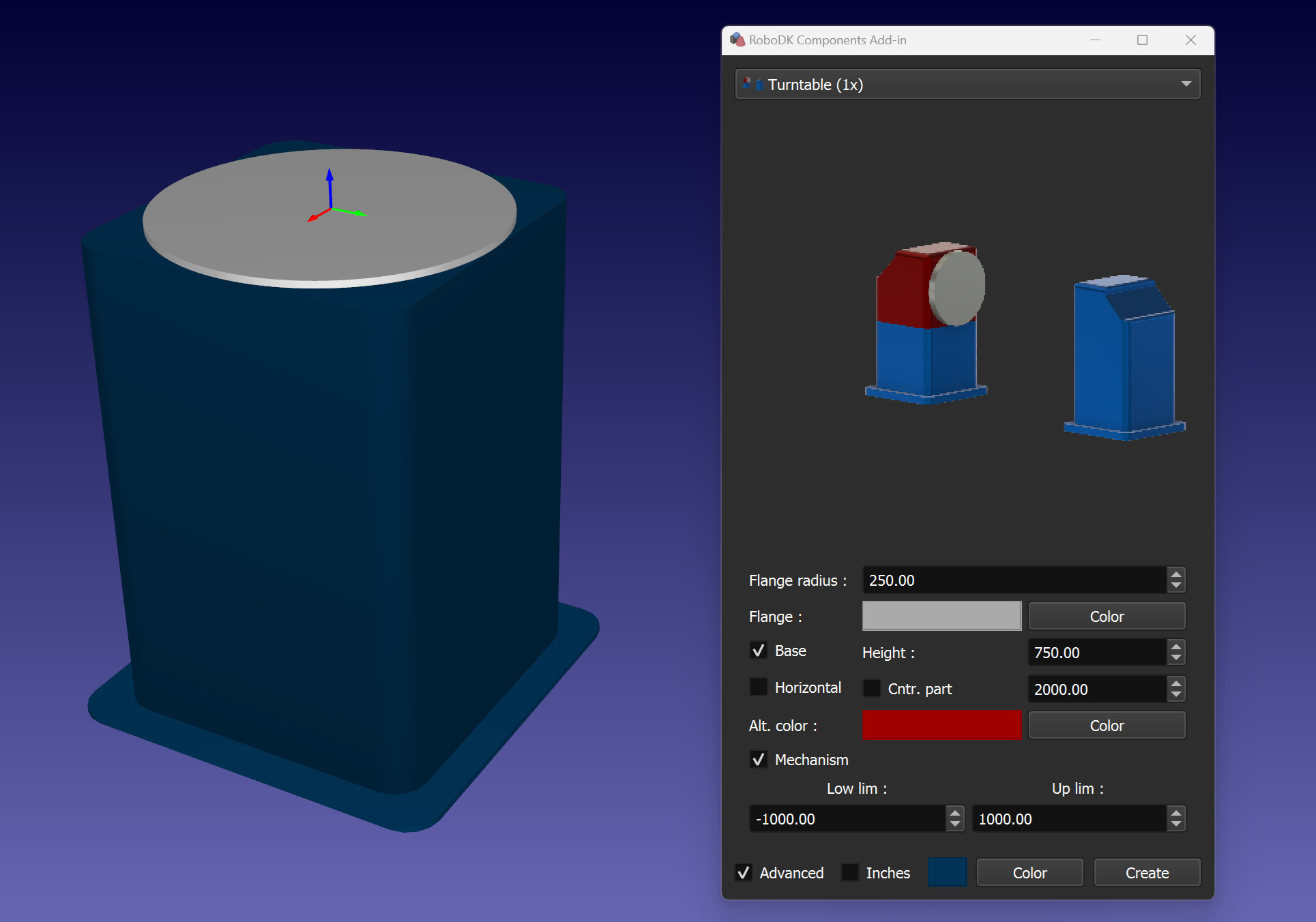
Tip:使用Base 复选框和高度参数创建定位器主体。
Tip:你可以通过切换Horizontal 复选框来创建水平或垂直定位器。此外配重块功能:"Cntr. part"选项配合偏移量参数实现。
Tip:使用Mechanism 复选框创建转盘机械结构。你还可以使用相应的参数设置运动限制。
2轴转盘
你可以通过指定法兰半径、垂直和水平偏移、底座高度以及底座、横梁和法兰的颜色等参数来创建倾斜转台。
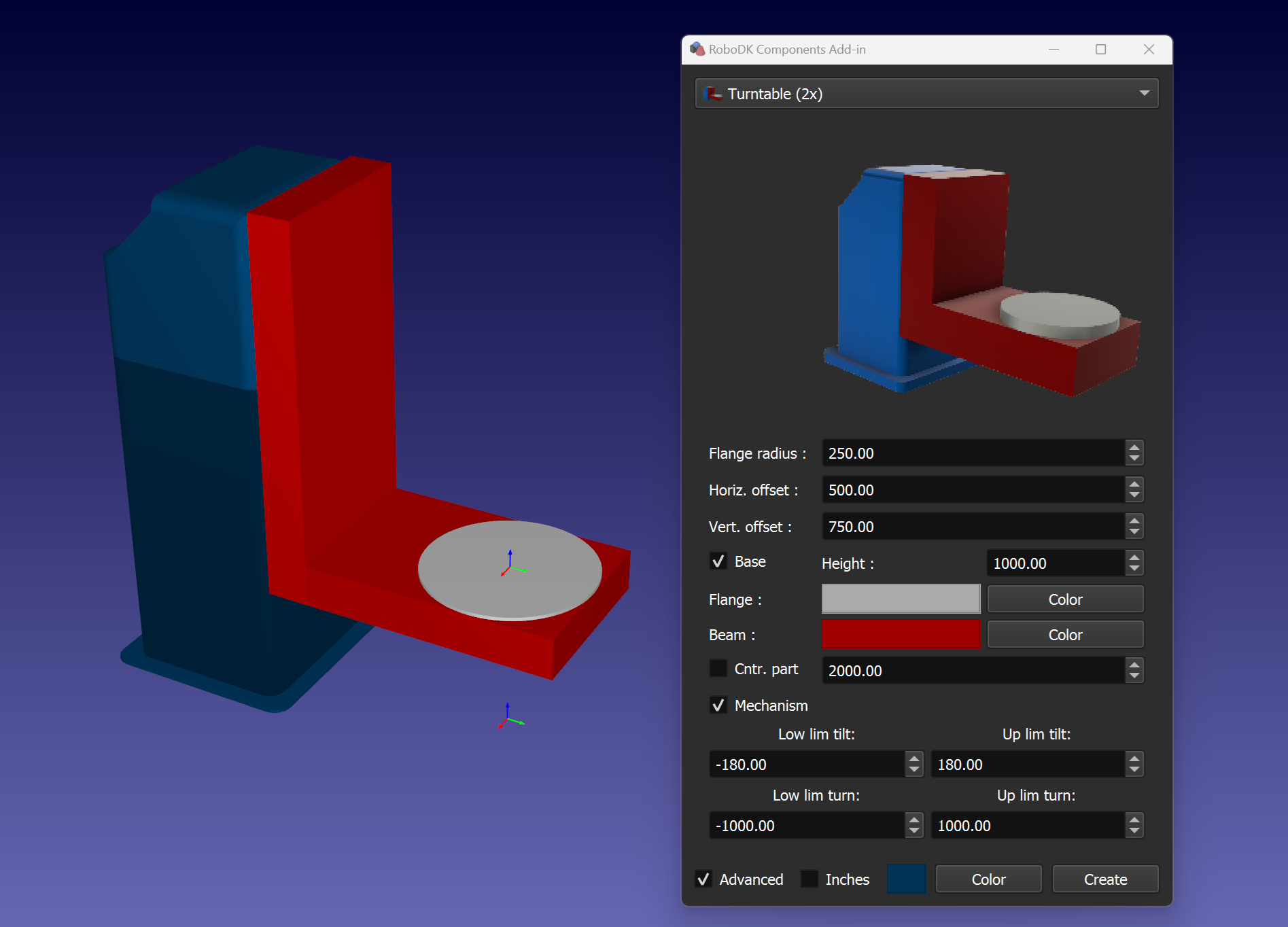
Tip:使用Base复选框和高度参数创建定位器底座。
Tip: "Cntr. part"选项配合偏移量参数实现。
Tip:使用Mechanism复选框创建倾斜转盘机械结构。你还可以使用相应的参数设置运动限制。
3轴转盘
你可以通过指定法兰半径、侧面和水平偏移、高度以及底座、横梁和法兰的颜色等参数来创建3轴定位器。
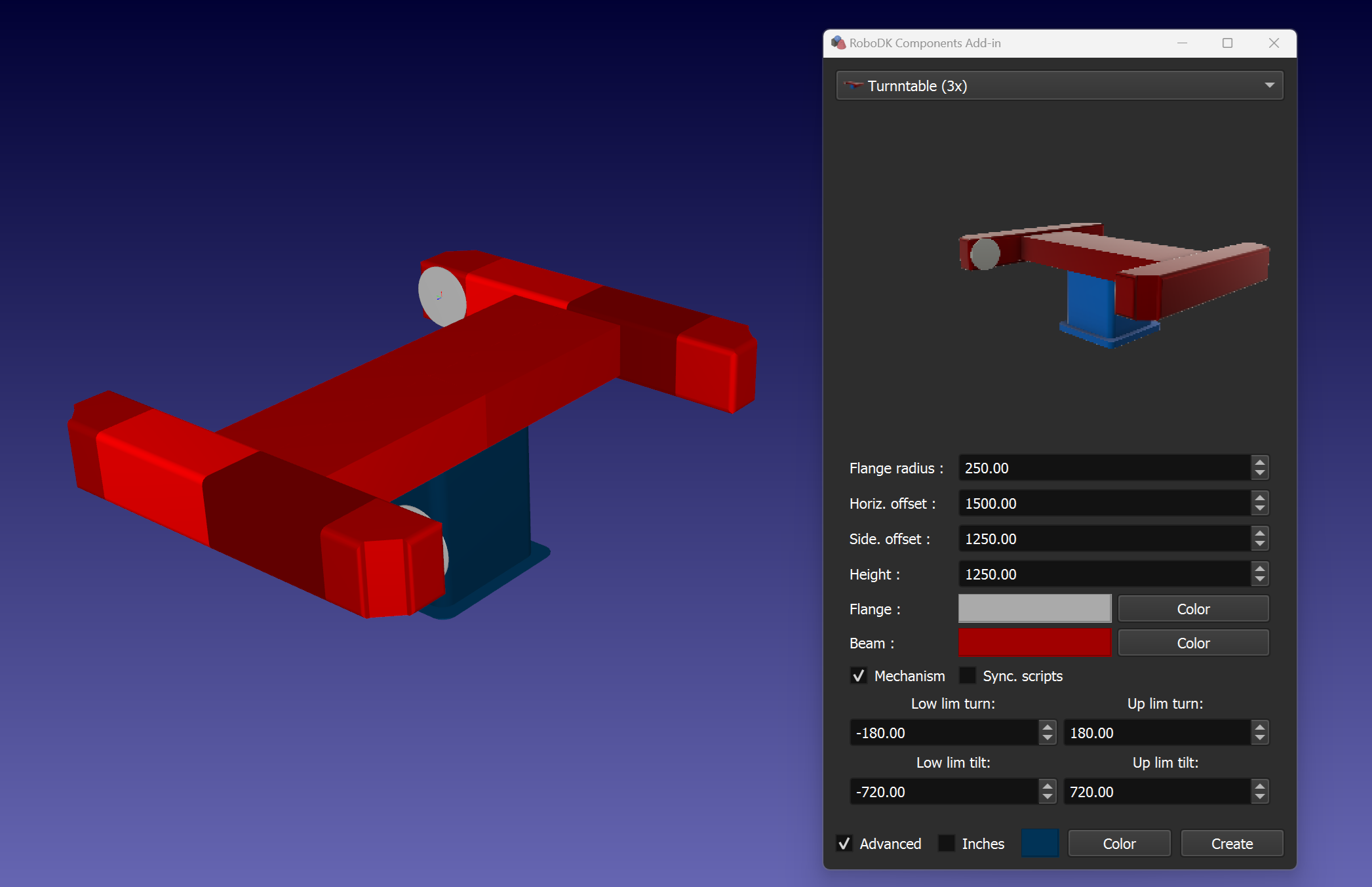
Tip:使用Mechanism 复选框创建三轴定位器机械结构。你还可以使用相应参数设置运动限制。
Tip:使用Sync. scripts复选框可创建额外的 Python 脚本,通过运行相应的脚本使机器人与所需的水平轴同步。
Note:默认情况下,C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ 是包含同步脚本示例的文件夹。
箱Box
你可以通过指定尺寸(X、Y、Z)来创建一个箱体。
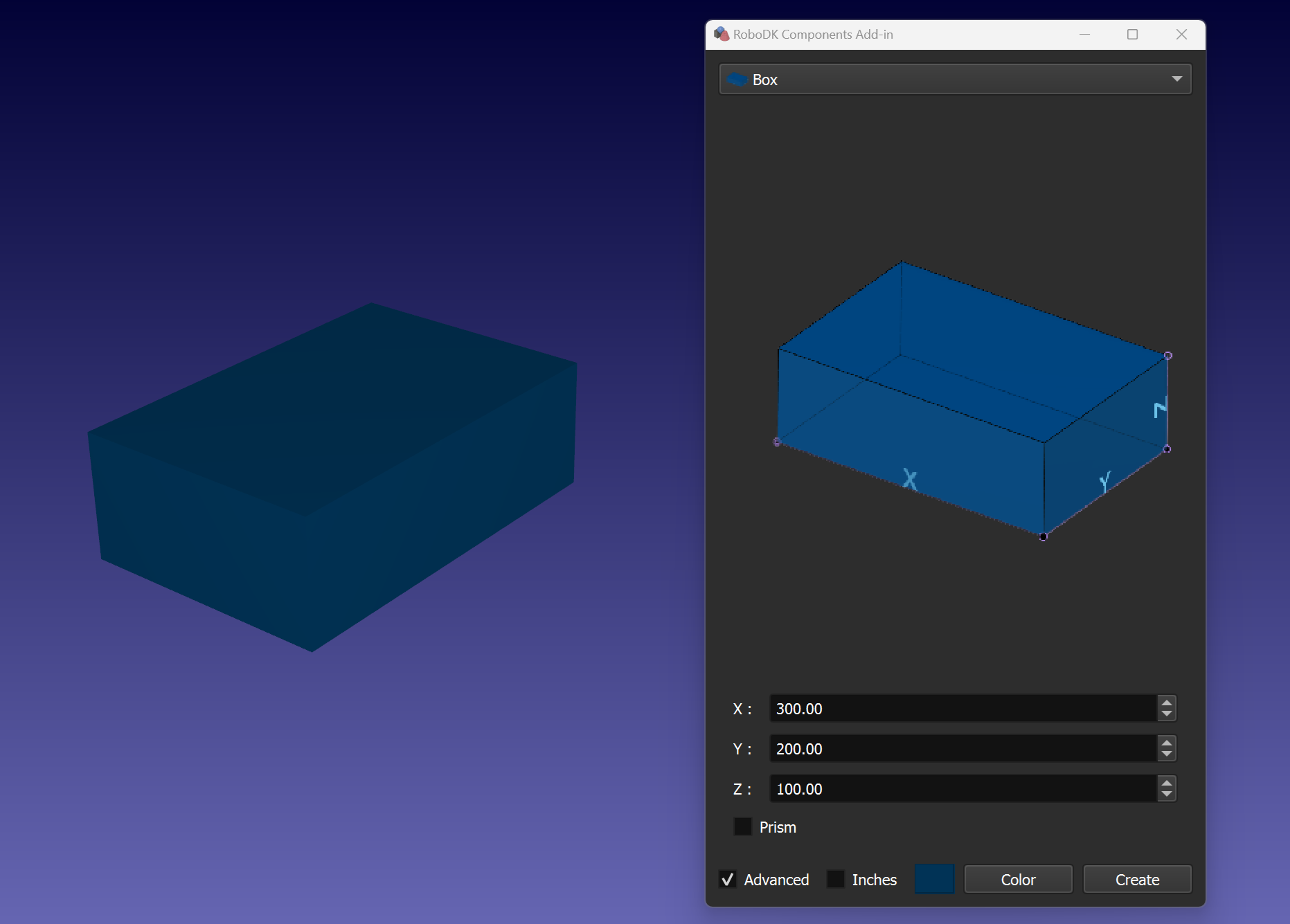
Tip:启用"Prism"可切换为棱柱形态。
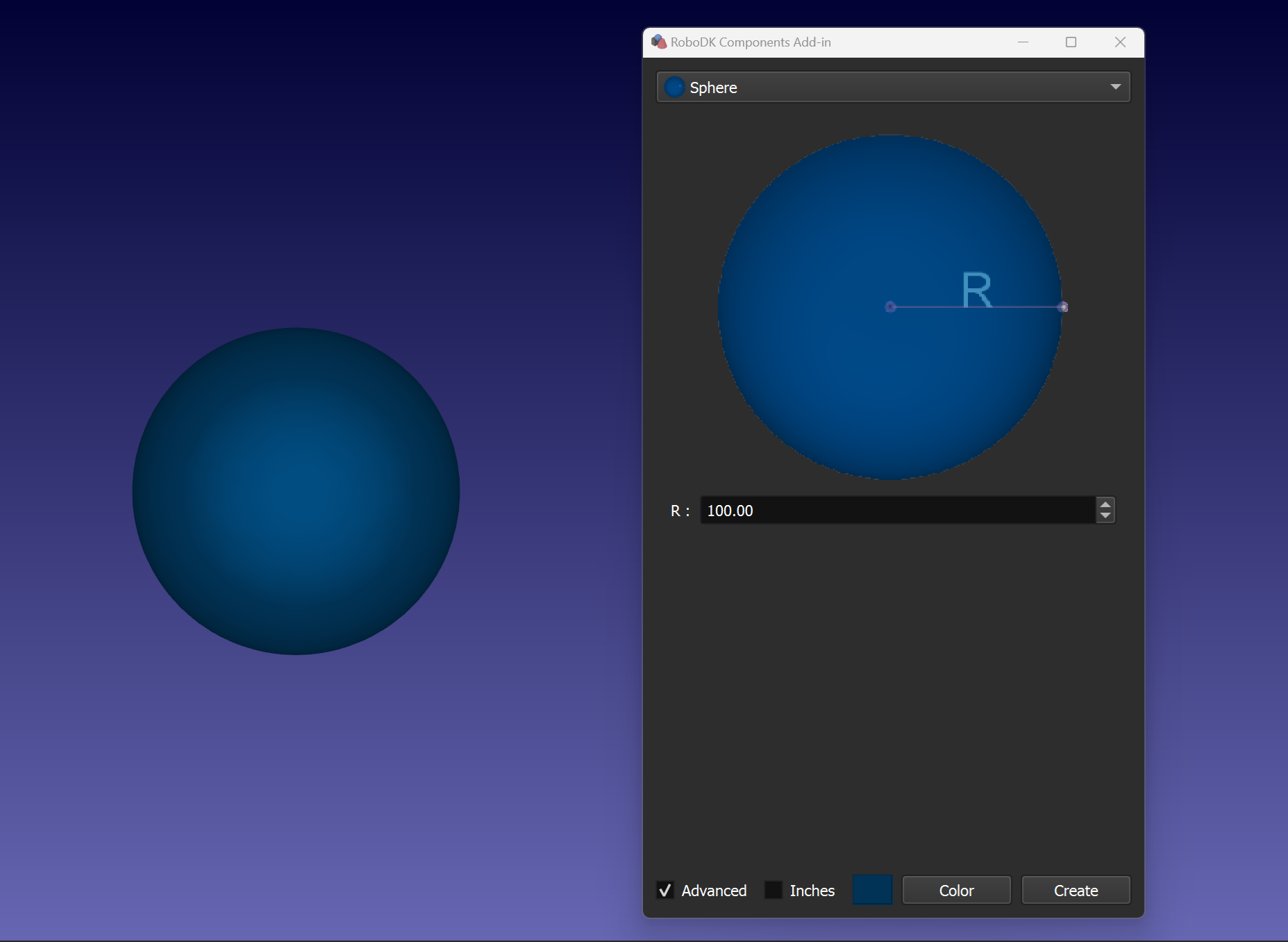
球体Sphere
仅需定义半径(R)参数。
圆锥体Cone
通过R1/R2(底面/顶面半径)和高度(H)控制形态,
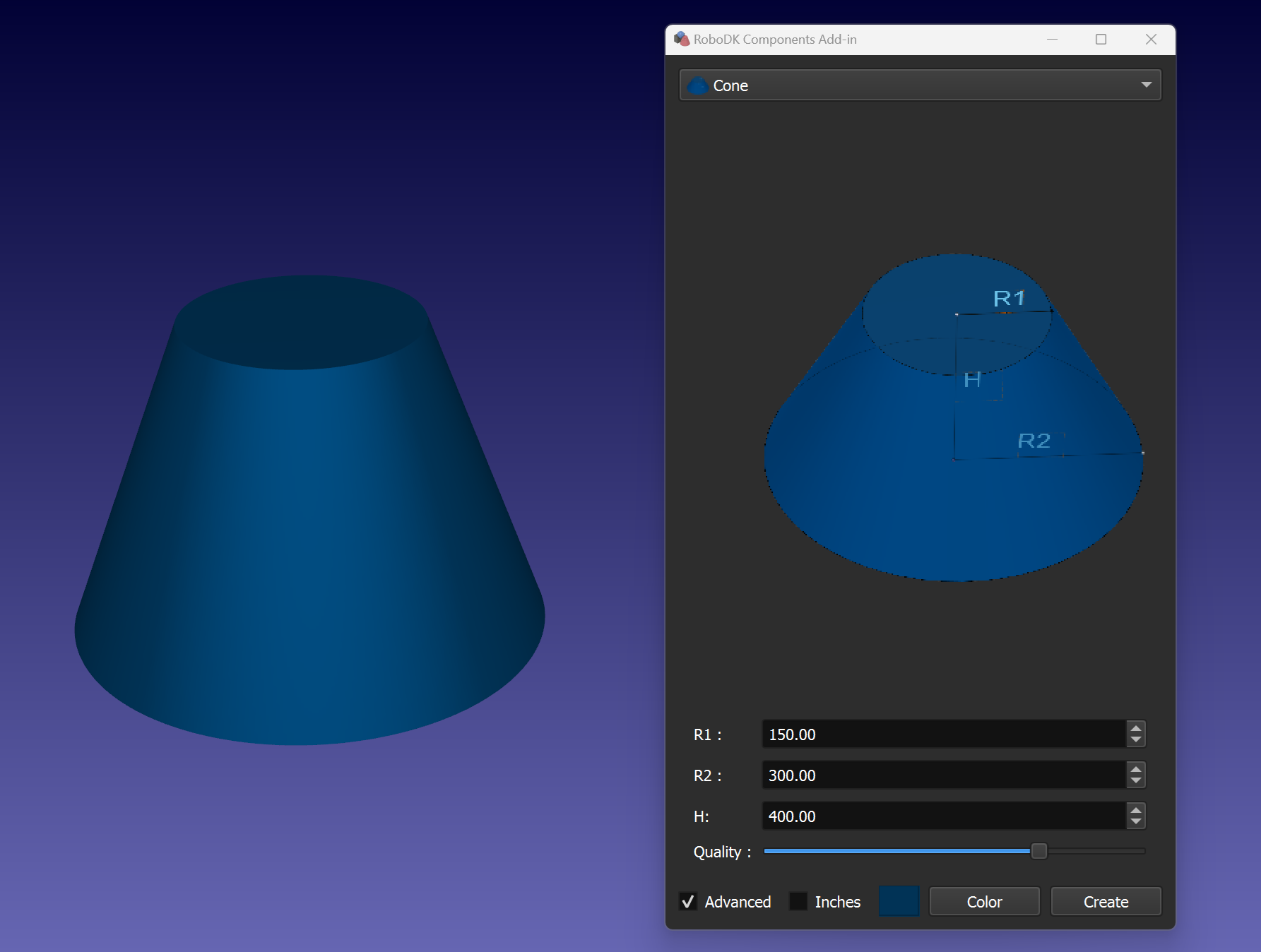
Tip:当R1=R2时自动转为圆柱体生成模式。