支持的后处理器
本焊接插件提供完整的仿真与离线编程功能,可根据不同机器人控制器类型生成专属指令集。当前已支持焊接指令集成的后置处理器包括:
1.ABB IRC5控制器(RAPID编程语言)
2.ABB S4C控制器(RAPID编程语言)
3.发那科(Fanuc)R30i系统
4.川崎(Kawasaki)机器人
5.KUKA KRC2控制器(DAT编程格式)
6.安川Motoman系列
如需为特定控制器增加支持,请随时联系我们。
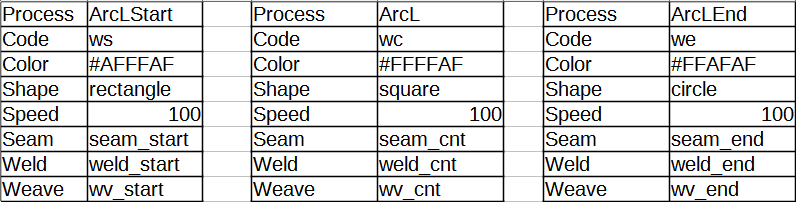
ABB焊接模板
模板文件abb_ws.csv、abb_wc.csv 和 abb_we.csv 分别用作焊接开始 (ArcLStart)、焊接继续 (ArcL) 和焊接结束 (ArcLEnd) 命令的 ABB 焊接模板。这些模板中的参数 "Seem"、"Weld "和 "Weave "必须等于实际控制器上相应焊接变量的名称。
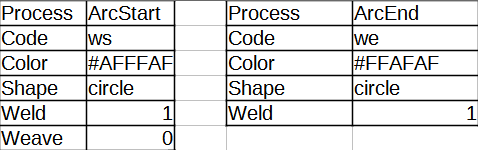
发那科(Fanuc)焊接模板
模板文件fanuc_ws.csv 和 fanuc_we.csv分别用作 ArcStart 和 ArcEnd 命令的发那科(Fanuc)焊接模板。ArcStart 可再次用于在过程中直接更改焊接模式。这些模板中的 "焊接 "和 "编织 "参数必须等于实际控制器上相应焊接变量的值。
川崎(Kawasaki)焊接模板
模板文件 kawasaki_ws.csv、kawasaki_wc.csv 和 kawasaki_we.csv 分别用作焊接开始(WS)、焊接继续(WC)和焊接结束(WE)命令的川崎焊接模板。这些模板中的 "Weld"和 "Crater"参数必须等于实际控制器上的相应焊接变量(如 W1SET 和 W2SET 数字)。
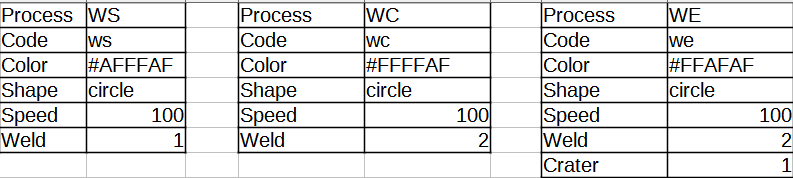
Tip:你可以使用 RoboDK 中指令:插入代码,添加带有焊接参数的 W1SET 和 W2SET 指令。
Note:RoboDK 焊接命令适用于其后的移动,但 AS 语言焊接命令会将移动的焊接参数设置到这些命令中指定的位置。
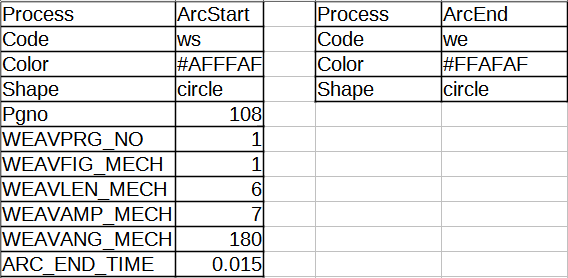
库卡(Kuka)焊接模板
模板文件kuka_ws.csv和kuka_we.csv分别用作 ArcStart 和 ArcEnd 命令的库卡焊接模板。ArcStart 模板中的参数必须等于实际控制器上相应焊接变量的值。
安川(Motoman)焊接模板
模板文件motoman_ws.csv、motoman_wc.csv 和motoman_we.csv 分别用作焊接开始(ARCON)、焊接继续(ARCSET)和焊接结束(ARCOF)命令的安川(Motoman)焊接模板。这些模板中的参数 "ASF"、"ACOND "和 "AEF "必须等于实际控制器上相应焊接变量的值。
