焊接插件
RoboDK焊接插件让你能够为机器人程序应用不同的焊接指令与工艺参数,并实现可视化呈现。
通过该插件,你可以实现以下功能:
1.便捷创建并添加焊接指令(如起弧、续焊、收弧等)
2.为指令定义参数列表(专用于焊接过程与可视化)
3.将运动轨迹呈现为实体模型
4.通过预设焊缝形状/剖面观察焊料堆积过程
5.轻松创建自定义插入代码指令
6.将所有数据保存在工作站项目中
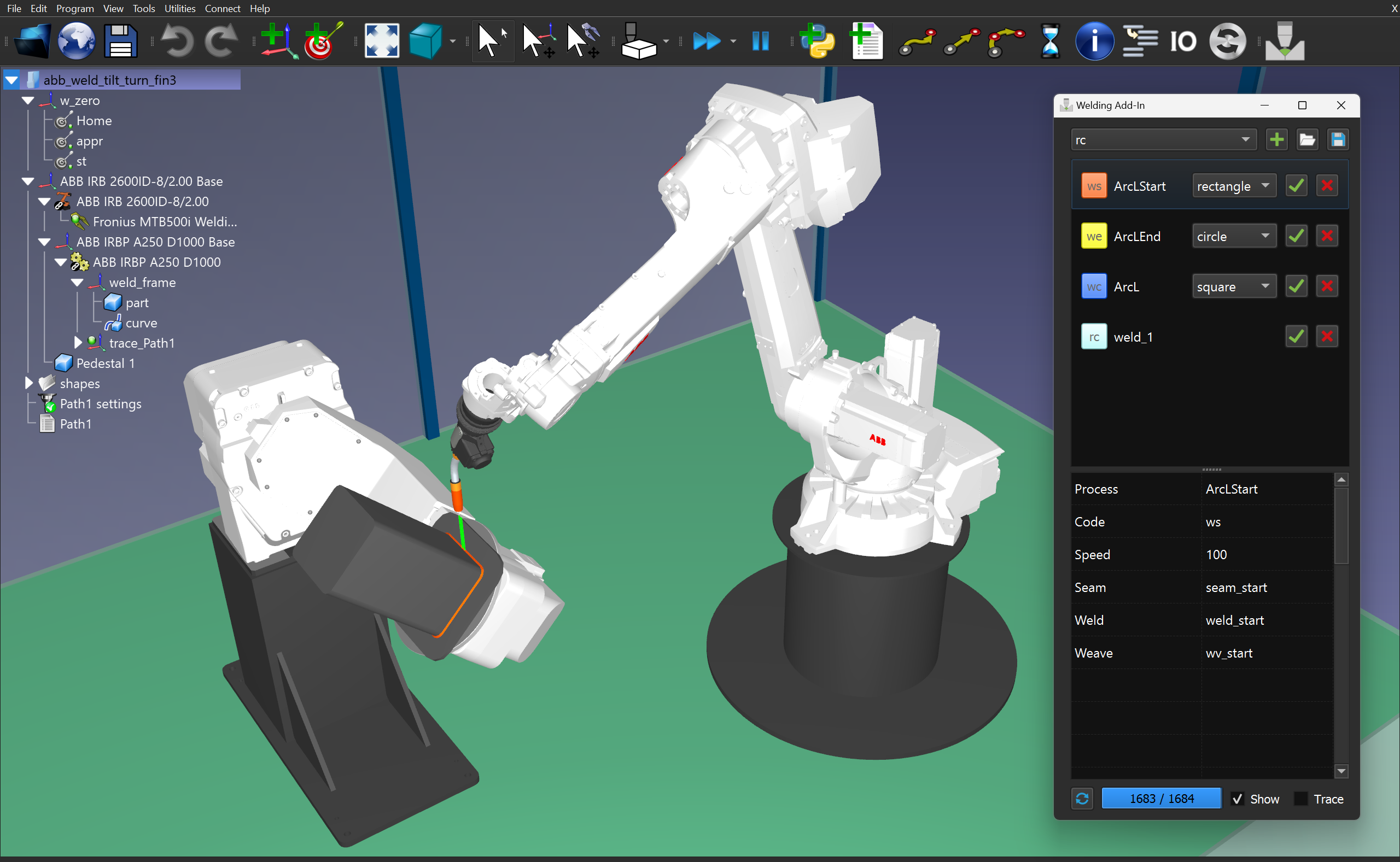
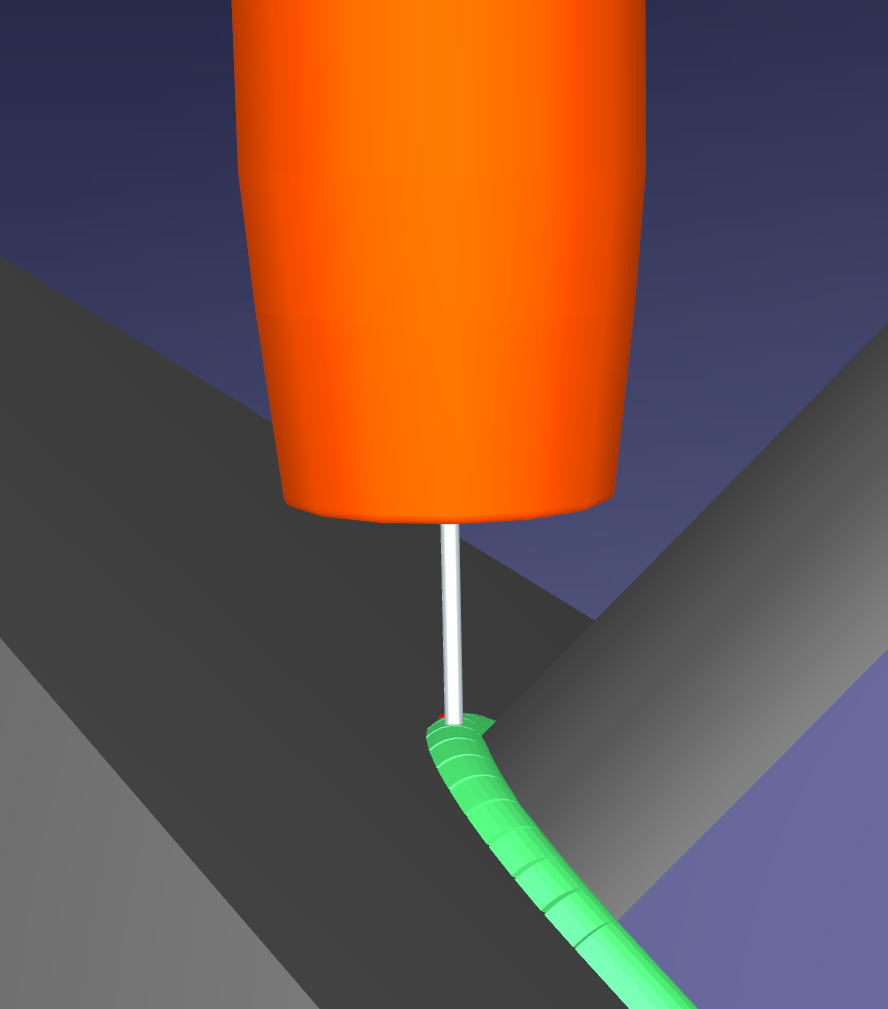
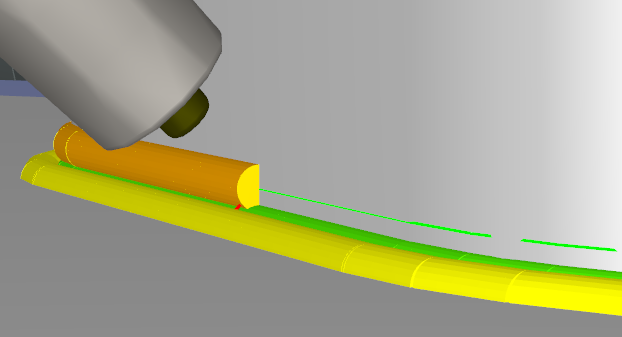
下图展示了焊缝轨迹的预览效果:
Video:焊接插件演示:https://www.youtube.com/watch?v=ahl2wAaP_cI。
Note:请参考文档中这个带定位器的机器人焊接示例,了解该焊接插件的实际使用案例。
安装插件
你可以从RoboDK 附加资源库中下载并安装最新版本的焊接插件。使用插件管理器可自动安装。
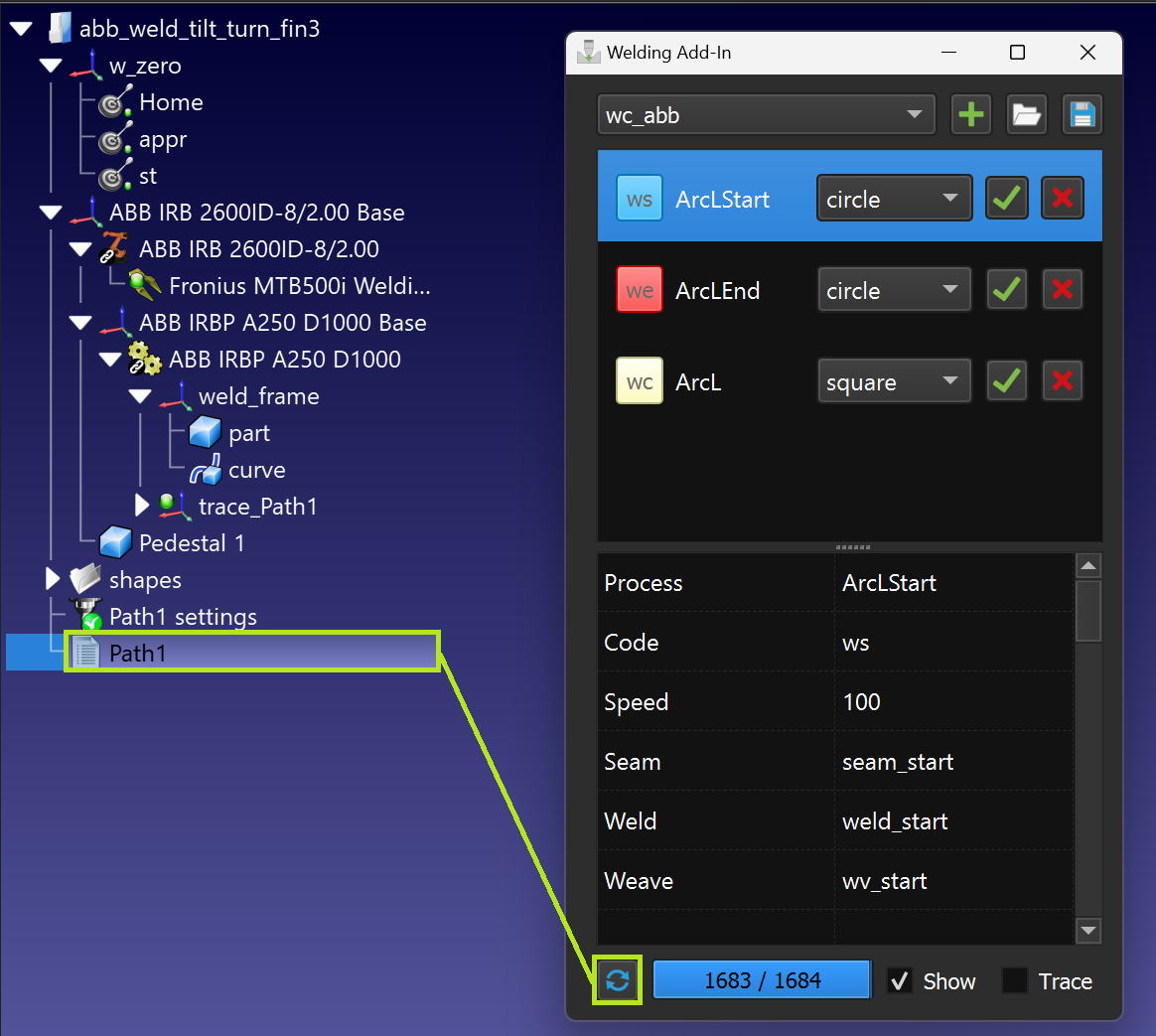
焊接接口
本节介绍焊接插件用户界面的功能。
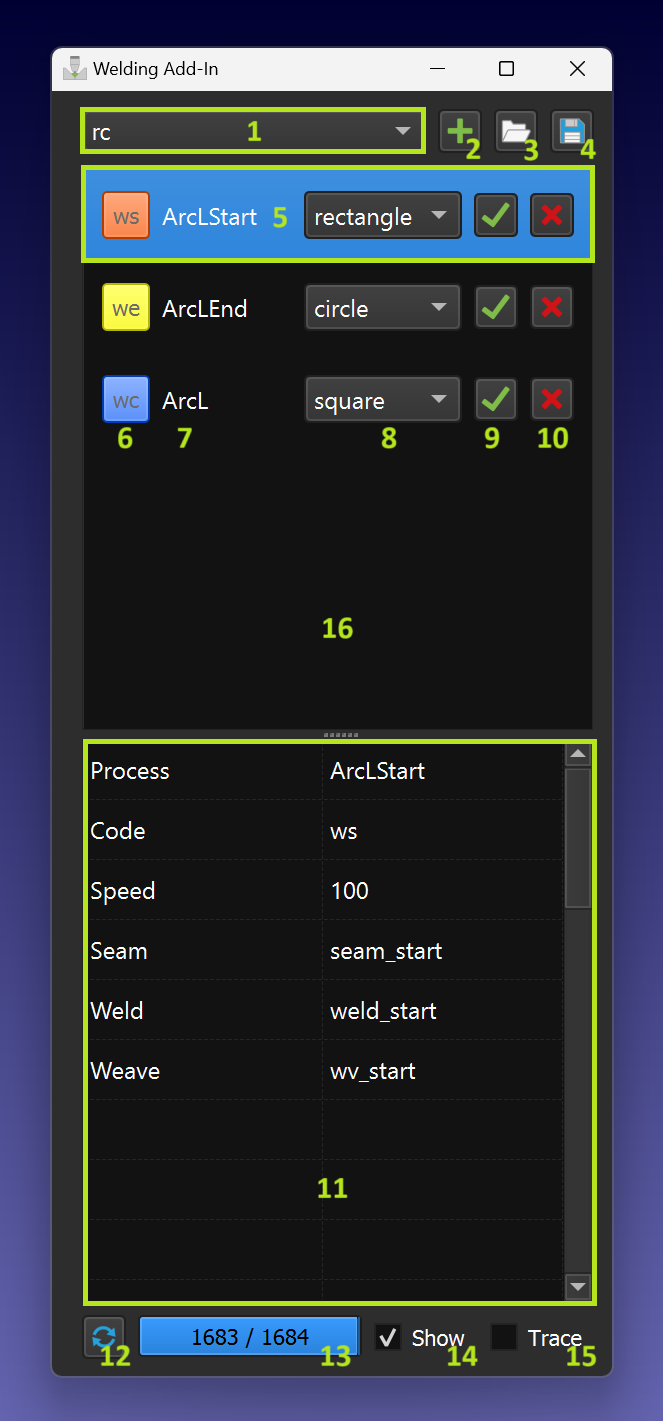
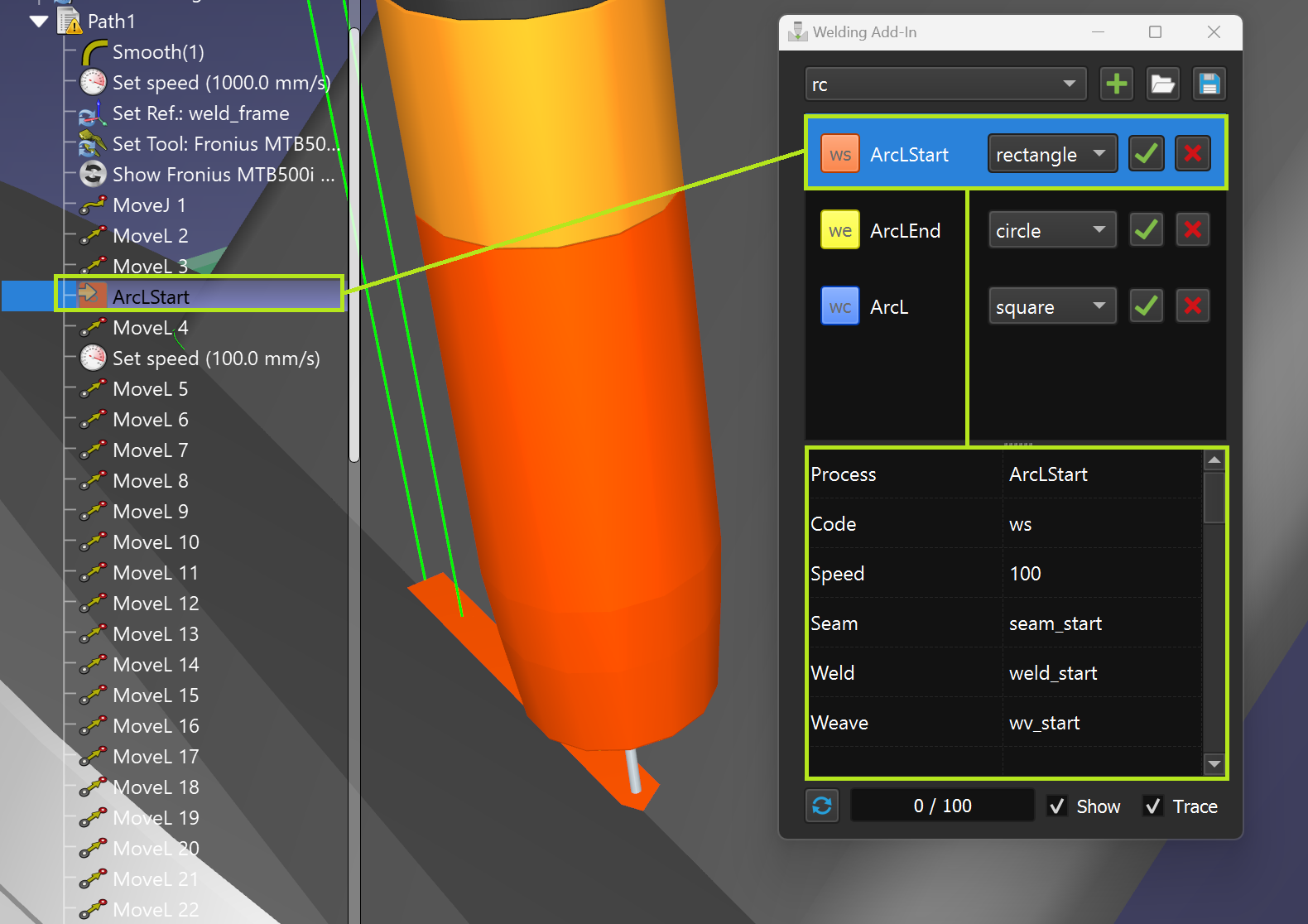
焊接插件包含以下功能元素:
1.指令的下拉菜单。
2.将指令添加到指令列表中。
3.导入指令。
4.导出指令。
5.当前指令(已选中)。
6.指令代码和图标颜色(点击可更改颜色)。
7.指令唯一名称。
8.合适的路径形状。
9.在程序序列或 CFP 中添加指示。
10.删除指令。
11.与所选指令相关的参数。
12.创建路径模型。
13.路径模型构建进度。
14.路径模型进度标志。
15.路径跟踪标志(允许添加模拟用的材料)。
16.指令的列表。
添加指令
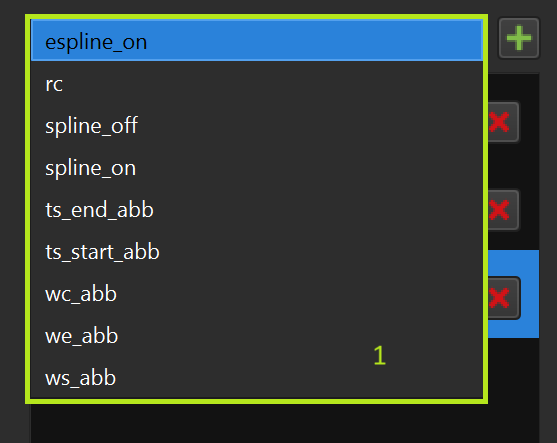
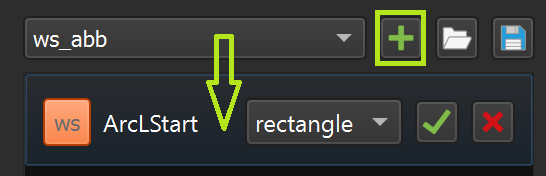
你可以从下拉菜单中,选择要添加的指令:
添加多个指令
你可以使用按钮 "+",从下拉菜单中添加所选指令:
指令模板路径(默认安装 RoboDK):
C:/RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\templates
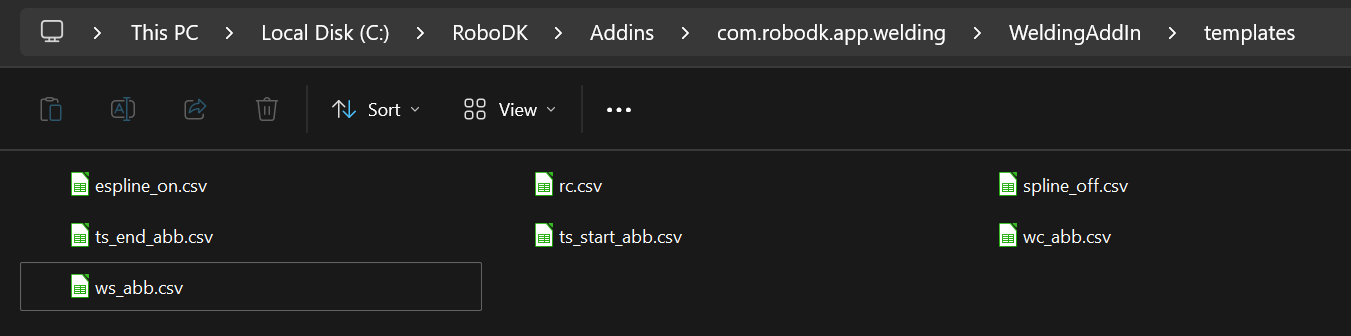
模板以".csv "文件格式呈现,字符串格式为 "参数->值":
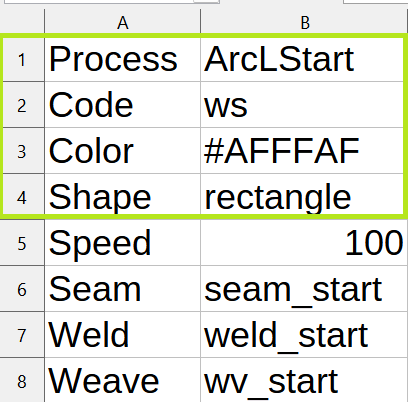
Note: 前四行应如上图所示。
1.进程'➔ '进程名称'(应指定某个名称)
2.代码"➔ "指令代码"(支持的指令代码之一)
3.颜色➔十六进制格式的任何颜色代码
4.形状➔文件名,包含焊接指令的形状模型
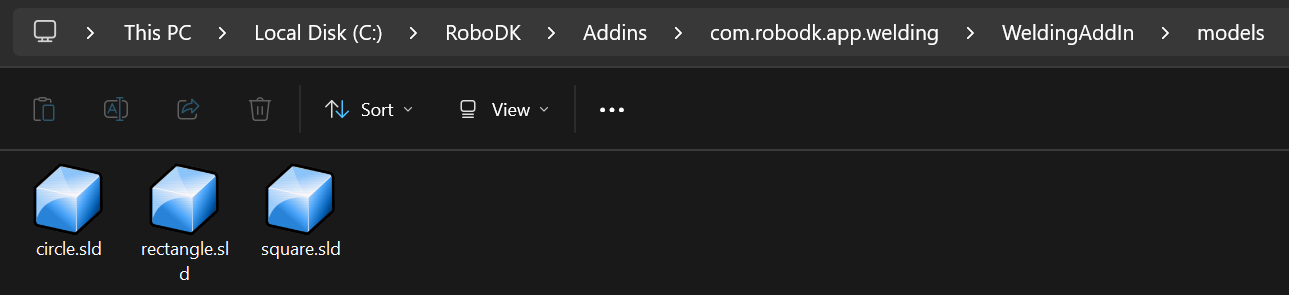
Note:形状名称应与文件名称相同。默认情况下,包含形状模型的文件夹为C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\models.
Note: 最多支持 96 个附加用户参数(在前 4 个预定义参数之后)。
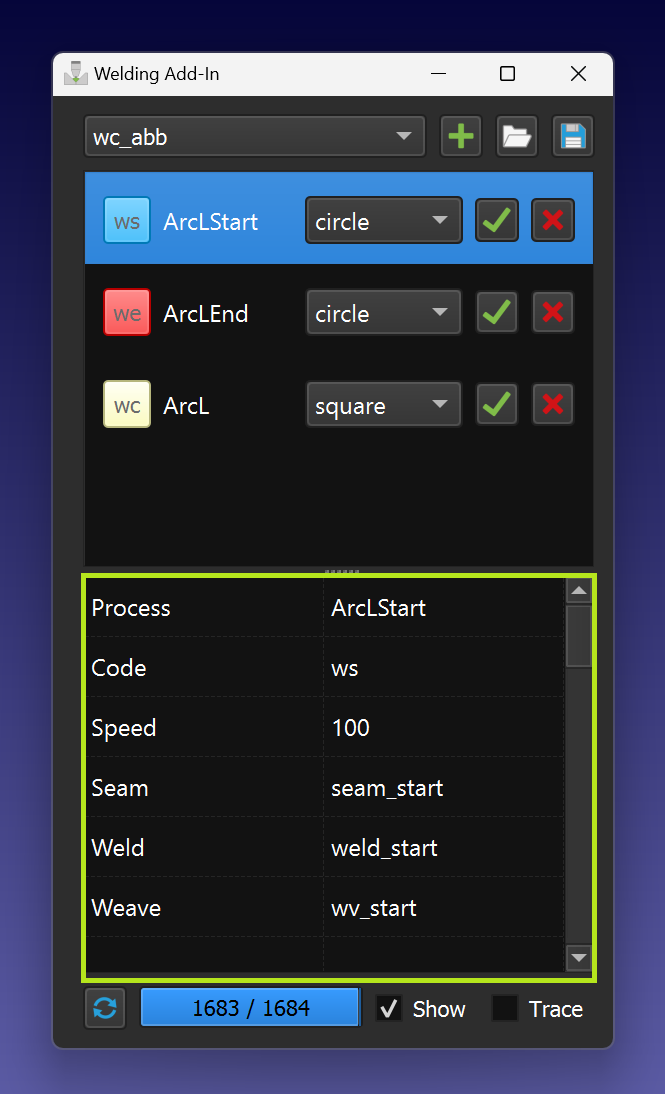
当前指令
你可以通过选择指令列表 (9) 中的一行来访问参数。此外,在程序执行过程中或双击相应程序指令时,指令行会自动高亮显示:
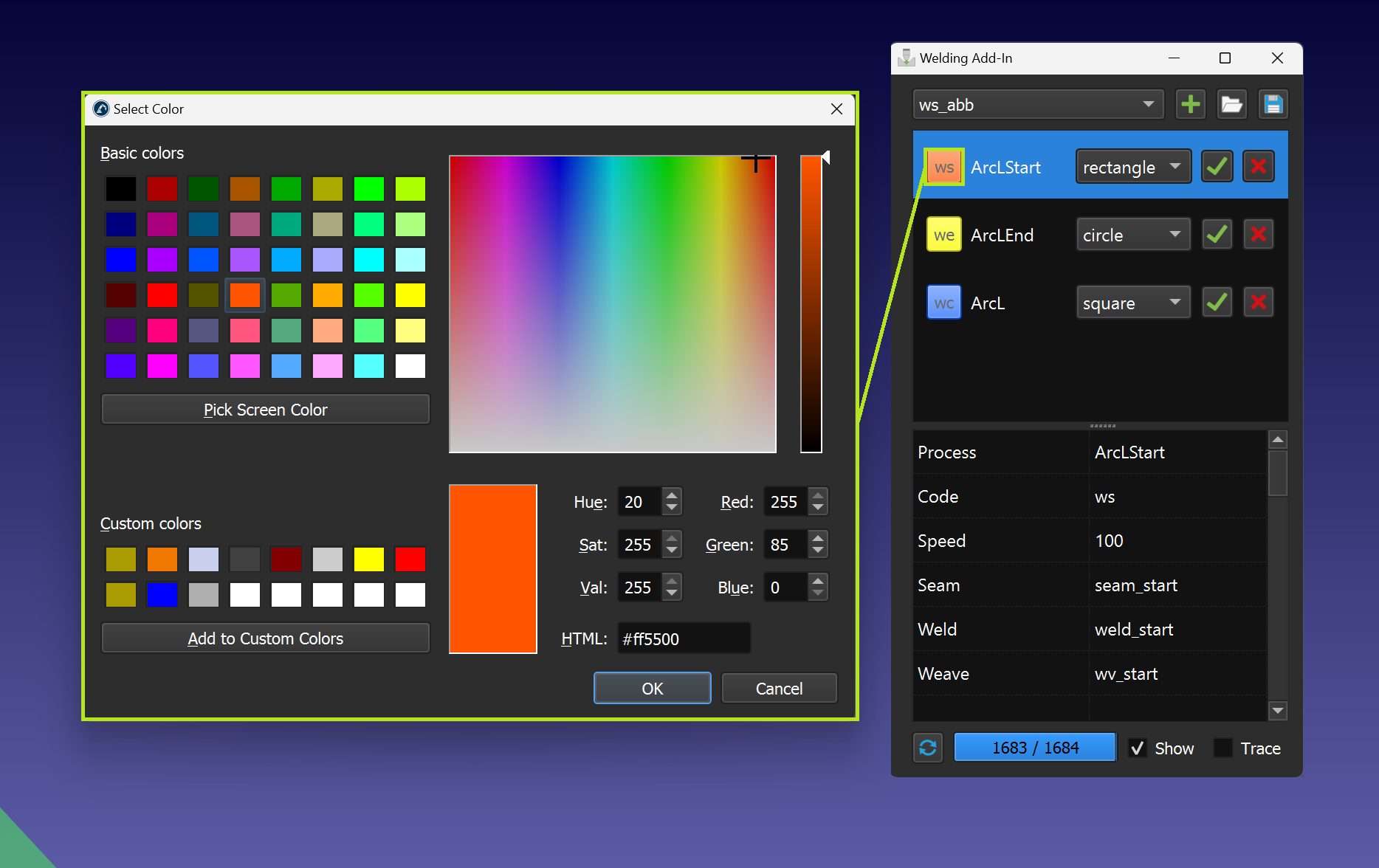
指令代码和图标颜色
你可以通过点击指令代码按钮来设置指令和相应路径的颜色(确保先选中指令行):
Note:默认情况下只支持以下指令类型(代码):
1.WS -启动焊接
2.WC -继续焊接
3.we -结束焊接
4.rc - 自定义插入代码指令
指令名称
指令列表中每个焊接指令必须有唯一的"Process"参数值(唯一名称),这是系统区分不同焊接指令的关键标识。
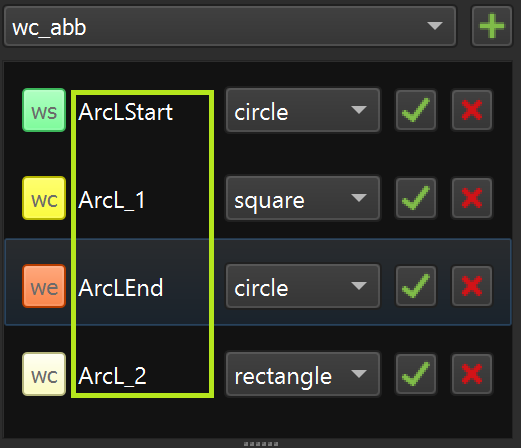
Tip:允许基于同一模板创建多个焊接指令,应重命名第一条指令,每次使用时需要为新指令赋予不同的名称。
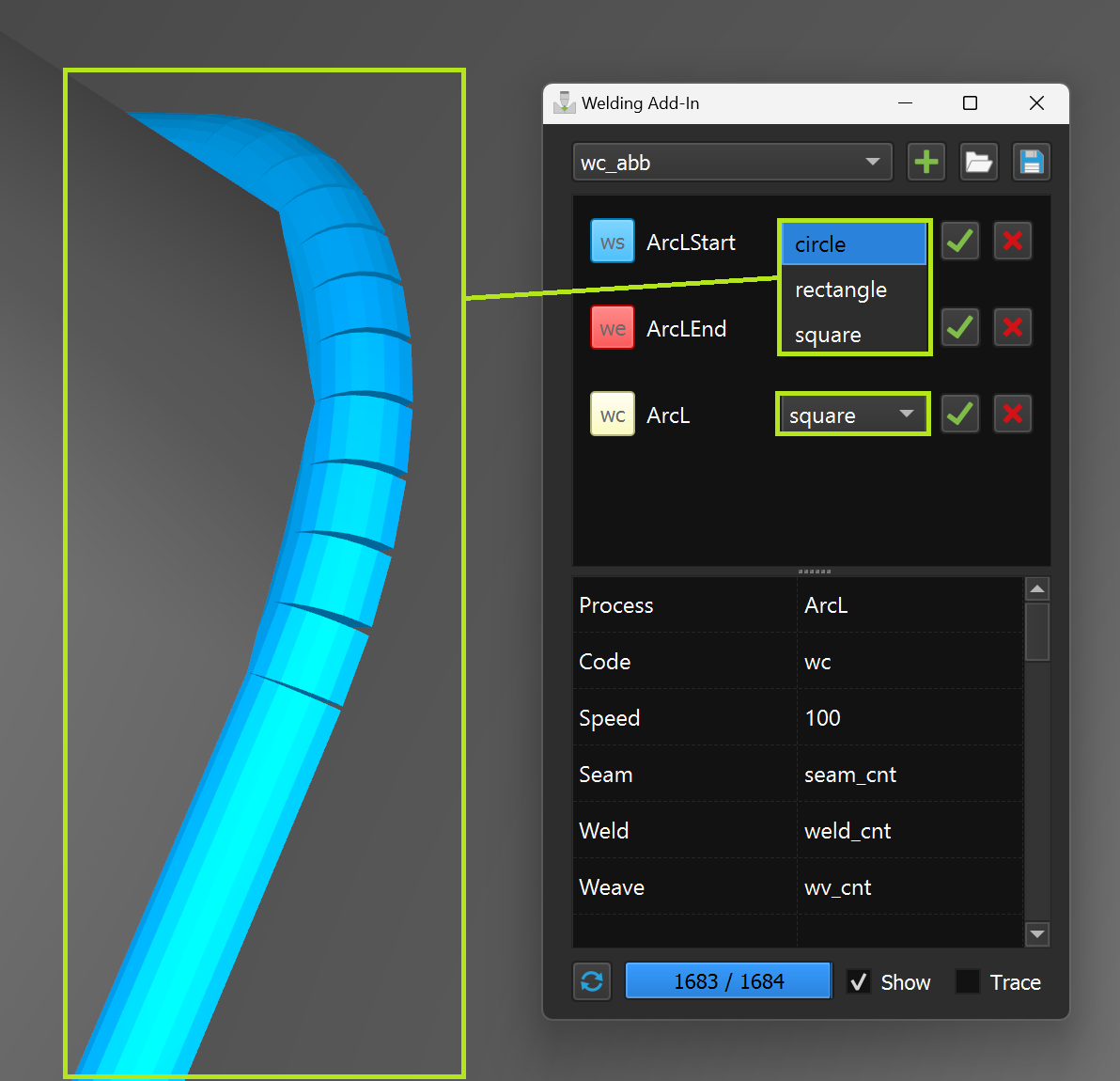
路径形状
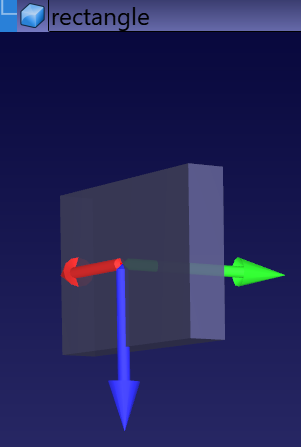
如果指令模板有路径形状定义,可以从下拉菜单中选择:circle,rectangle,square。
Tip:你可以使用自己的形状。模型文件名和模板中的"Shape"参数值应相同。默认使用以下包含形状模型的文件夹:
C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\models
Tip:如果你添加了本地的路径元素模型,可以打开观察选择的模型,了解如何正确放置路径元素相对于世界坐标系。
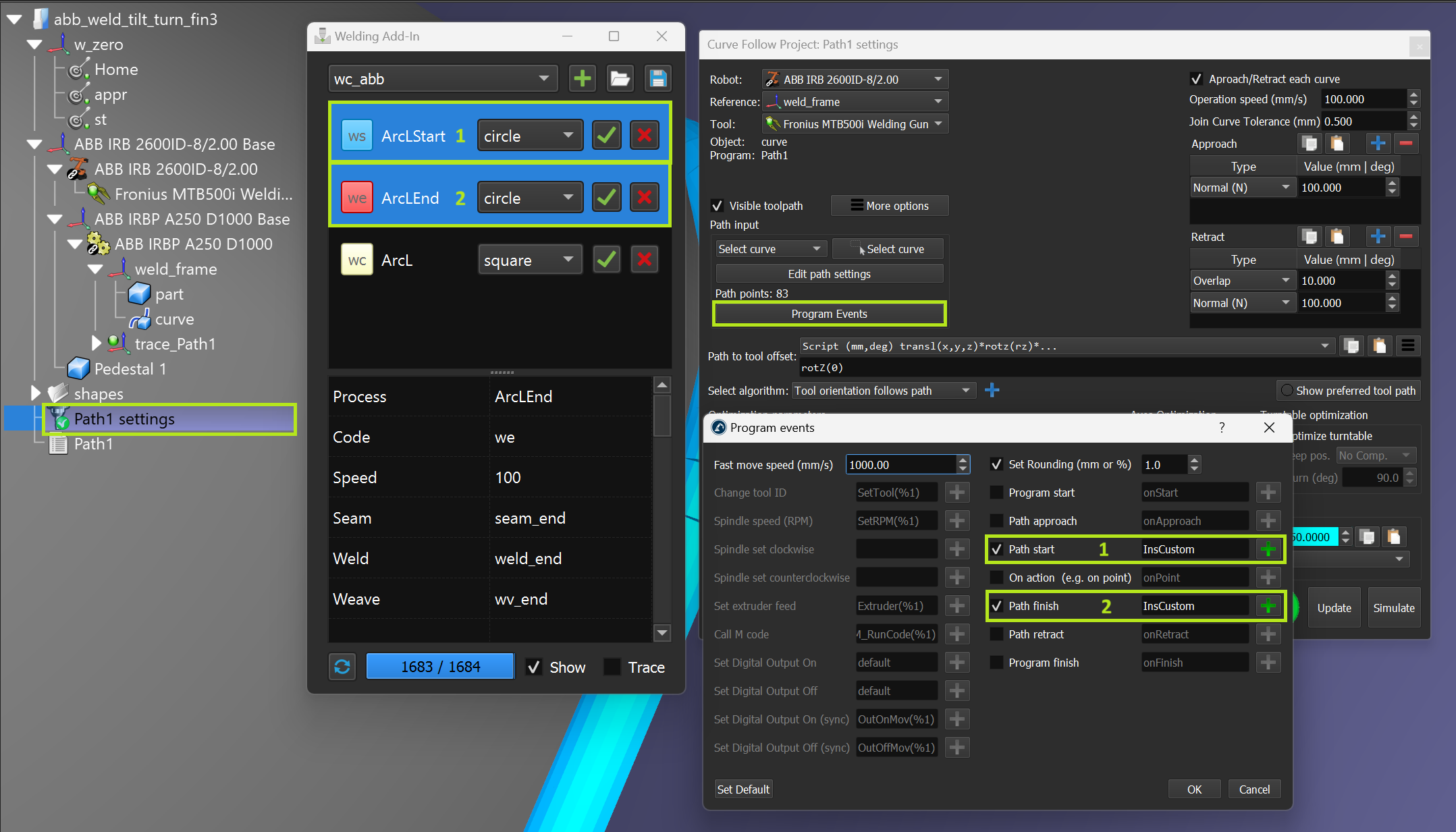
在程序中添加指令
这是一个用于在机器人程序中精确插入焊接控制指令的工具,它提供了灵活的方式将焊接相关指令插入到机器人程序中。你可以在 RoboDK 程序前添加一条或一组按顺序选择的指令。
Tip:如果是单项模式(在插件端),指令 "ws"、"wc "和 "rc "将添加到 RoboDK 选定程序指令之前。而 "we "类型的指令将添加到所选序列之后。
Tip:如果是多选模式(插件端),第一条选定指令将添加到 RoboDK 程序中选定程序指令之前,第二条选定指令添加到选定序列之后。
Tip:你也可以用同样的方法到CFP焊接指令。选择序列中的 1st和 2nd指令将被添加到程序事件设置中。
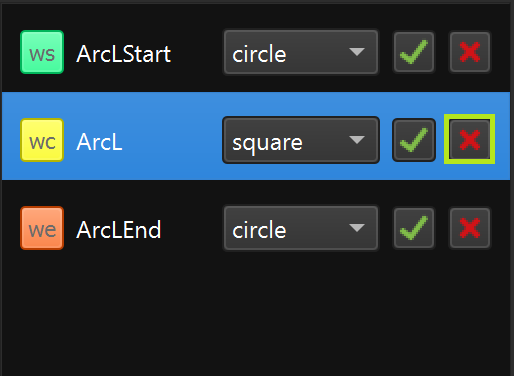
从列表中删除指令
点击按钮 "X ",可从指令列表中删除指令。
参数
你可以直接在参数表中更改参数。更改内容可自动保存。
参数导入/导出
参数导入/导出功能允许用户在RoboDK中批量管理焊接指令及其参数,实现数据的快速迁移和备份。你可以导入带参数的整个指令列表,或使用参数导入/导出功能导出数据。

构建路径
你可以使用所选程序的“Build”功能来构建路径(需要包含焊接指令)。
Tip:进度条显示路径构建的进度,勾选Show,就能看到路径模型的进度。
路径追踪
勾选选项:Trace,就可以观察机器人沿焊接路径移动时,机器人涂抹焊接材料的效果,显示材料沉积过程。

Note:尚不支持机器人保持物体 (机器人持握工件)模式的TCP优化算法,不支持"Robot holds object and follows trajectory"(机器人持握工件并跟随轨迹)模式。
支持的后处理器
本焊接插件提供完整的仿真与离线编程功能,可根据不同机器人控制器类型生成专属指令集。当前已支持焊接指令集成的后置处理器包括:
1.ABB IRC5控制器(RAPID编程语言)
2.ABB S4C控制器(RAPID编程语言)
3.发那科(Fanuc)R30i系统
4.川崎(Kawasaki)机器人
5.KUKA KRC2控制器(DAT编程格式)
6.安川Motoman系列
如需为特定控制器增加支持,请随时联系我们。
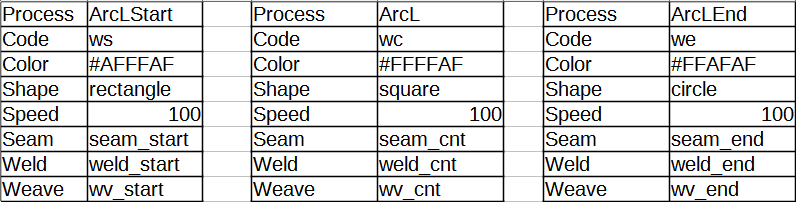
ABB焊接模板
模板文件abb_ws.csv、abb_wc.csv 和 abb_we.csv 分别用作焊接开始 (ArcLStart)、焊接继续 (ArcL) 和焊接结束 (ArcLEnd) 命令的 ABB 焊接模板。这些模板中的参数 "Seem"、"Weld "和 "Weave "必须等于实际控制器上相应焊接变量的名称。
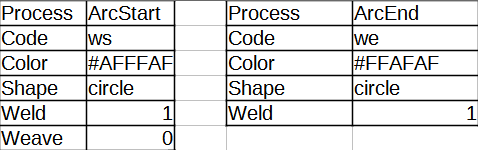
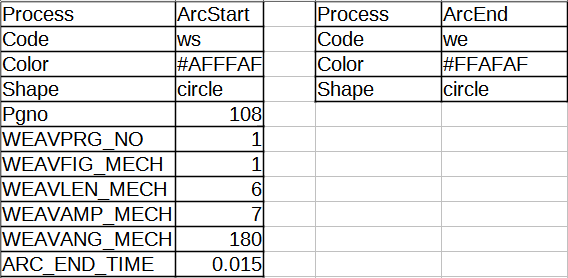
发那科(Fanuc)焊接模板
模板文件fanuc_ws.csv 和 fanuc_we.csv分别用作 ArcStart 和 ArcEnd 命令的发那科(Fanuc)焊接模板。ArcStart 可再次用于在过程中直接更改焊接模式。这些模板中的 "焊接 "和 "编织 "参数必须等于实际控制器上相应焊接变量的值。
川崎(Kawasaki)焊接模板
模板文件 kawasaki_ws.csv、kawasaki_wc.csv 和 kawasaki_we.csv 分别用作焊接开始(WS)、焊接继续(WC)和焊接结束(WE)命令的川崎焊接模板。这些模板中的 "Weld"和 "Crater"参数必须等于实际控制器上的相应焊接变量(如 W1SET 和 W2SET 数字)。
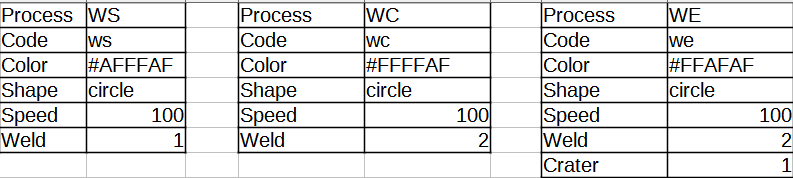
Tip:你可以使用 RoboDK 中指令:插入代码,添加带有焊接参数的 W1SET 和 W2SET 指令。
Note:RoboDK 焊接命令适用于其后的移动,但 AS 语言焊接命令会将移动的焊接参数设置到这些命令中指定的位置。
库卡(Kuka)焊接模板
模板文件kuka_ws.csv和kuka_we.csv分别用作 ArcStart 和 ArcEnd 命令的库卡焊接模板。ArcStart 模板中的参数必须等于实际控制器上相应焊接变量的值。
安川(Motoman)焊接模板
模板文件motoman_ws.csv、motoman_wc.csv 和motoman_we.csv 分别用作焊接开始(ARCON)、焊接继续(ARCSET)和焊接结束(ARCOF)命令的安川(Motoman)焊接模板。这些模板中的参数 "ASF"、"ACOND "和 "AEF "必须等于实际控制器上相应焊接变量的值。
