配置仿真相机
为了将工作站资产精确叠加到视频画面上,必须创建一个仿真相机。该仿真相机使用利用靶标计算出的相机位姿和轨迹,从与输入视频画面相同的角度、距离和轨迹记录 RoboDK 工作站。
该模拟相机的分辨率需要与输入视频相匹配,这样标记缩放才能准确。为管理平台添加虚拟相机的步骤如下:
1.在工具栏中选择:Image Processing Editor ➔ Add a RoboDK Camera创建相机。
2.右键相机选择:相机设置。
3.调整分辨率等参数与输入视频一致(例如1280x720p)
4.对齐参考坐标系确保虚拟标记在视场内
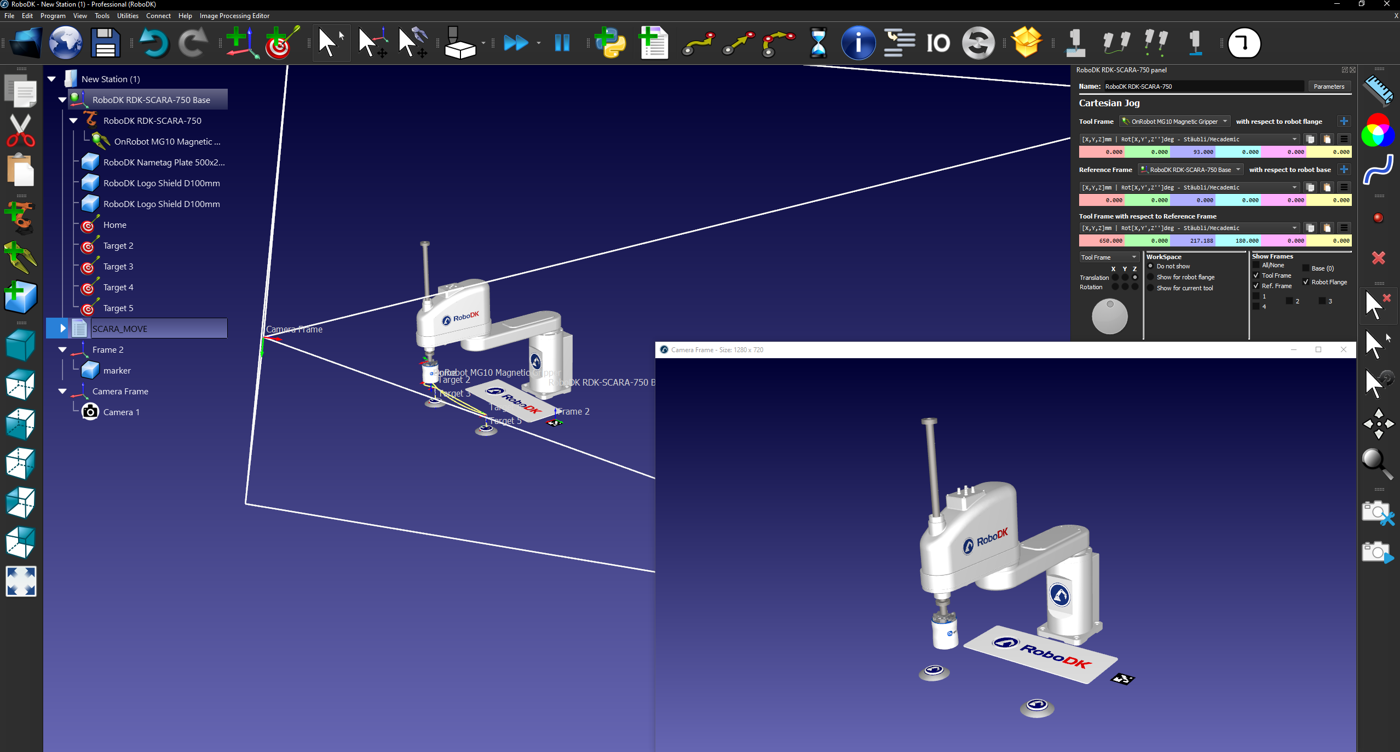
Tip:可以根据需要调整焦距和工作距离,以确保在渲染时间内所有站内物体都在视图中。下图显示的是配置充分的虚拟相机,分辨率为 1280x720p。
拍摄输入视频时的注意事项:
1.将标记置于光照充足的平面。
2.保持相机参数一致(分辨率/帧率等)。
3.确保可辨认的 Aruco 证件(相机必须保持证件可辨认。应避免的事项镜头过快/模糊、相机分辨率低、标记与相机距离过远)。
4.使用.mp4 或 .avi 格式。
Tip:高分辨率/高帧率视频会导致渲染时间显著增加。对于超过 720p/60fps 的镜头,预期视频渲染时间会明显延长,相机 AR 中的 FPS 也会降低。