入门指南
新建项目章节展示了如何在RoboDK中创建一个包含优傲UR10机器人的离线编程项目,实现喷涂应用。本范例概括了使用RoboDK仿真与离线编程的关键特点,包括:
1.如何在
2.如何
3.如何
4.如何
5.如何
6.如何
7.如何
8.如何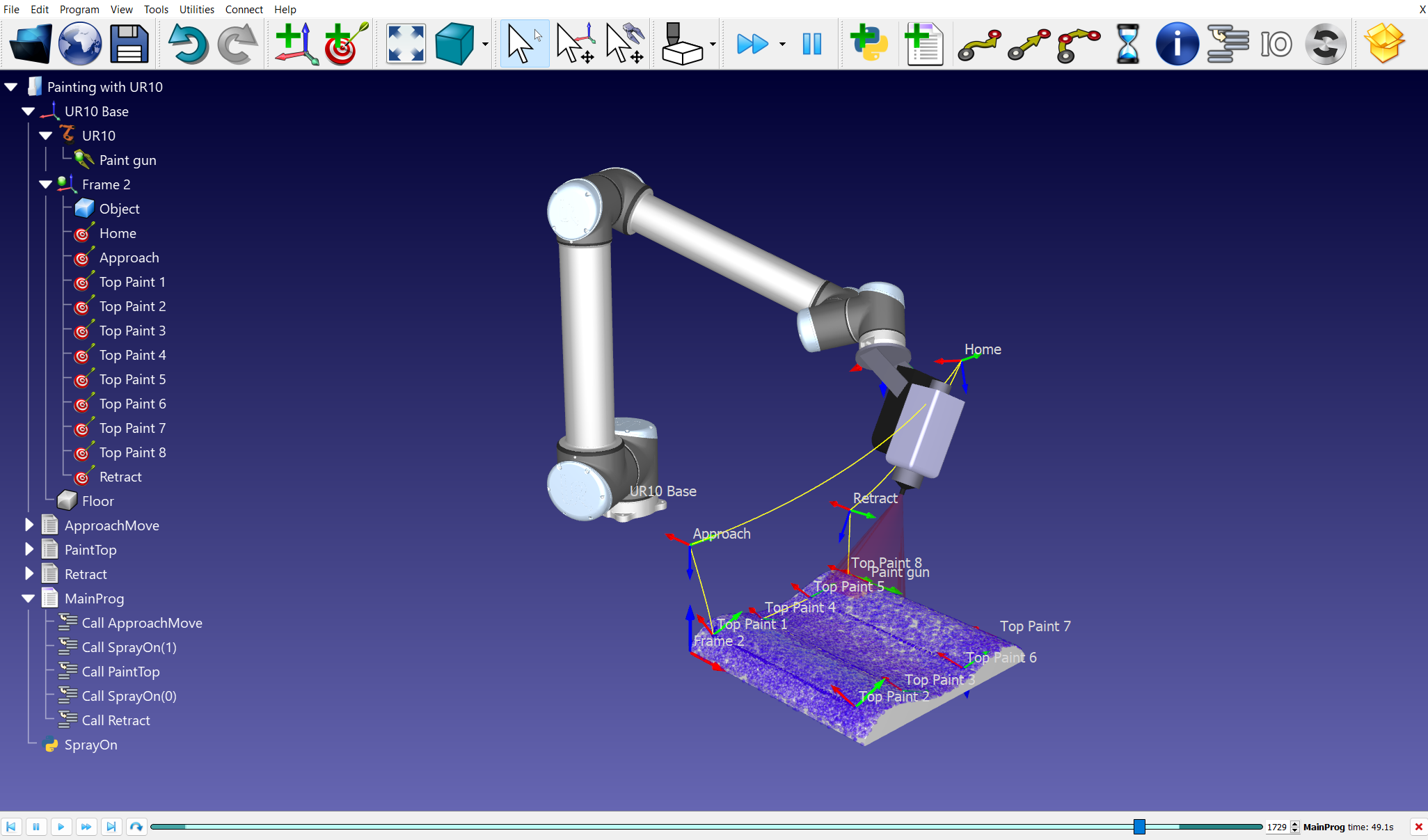
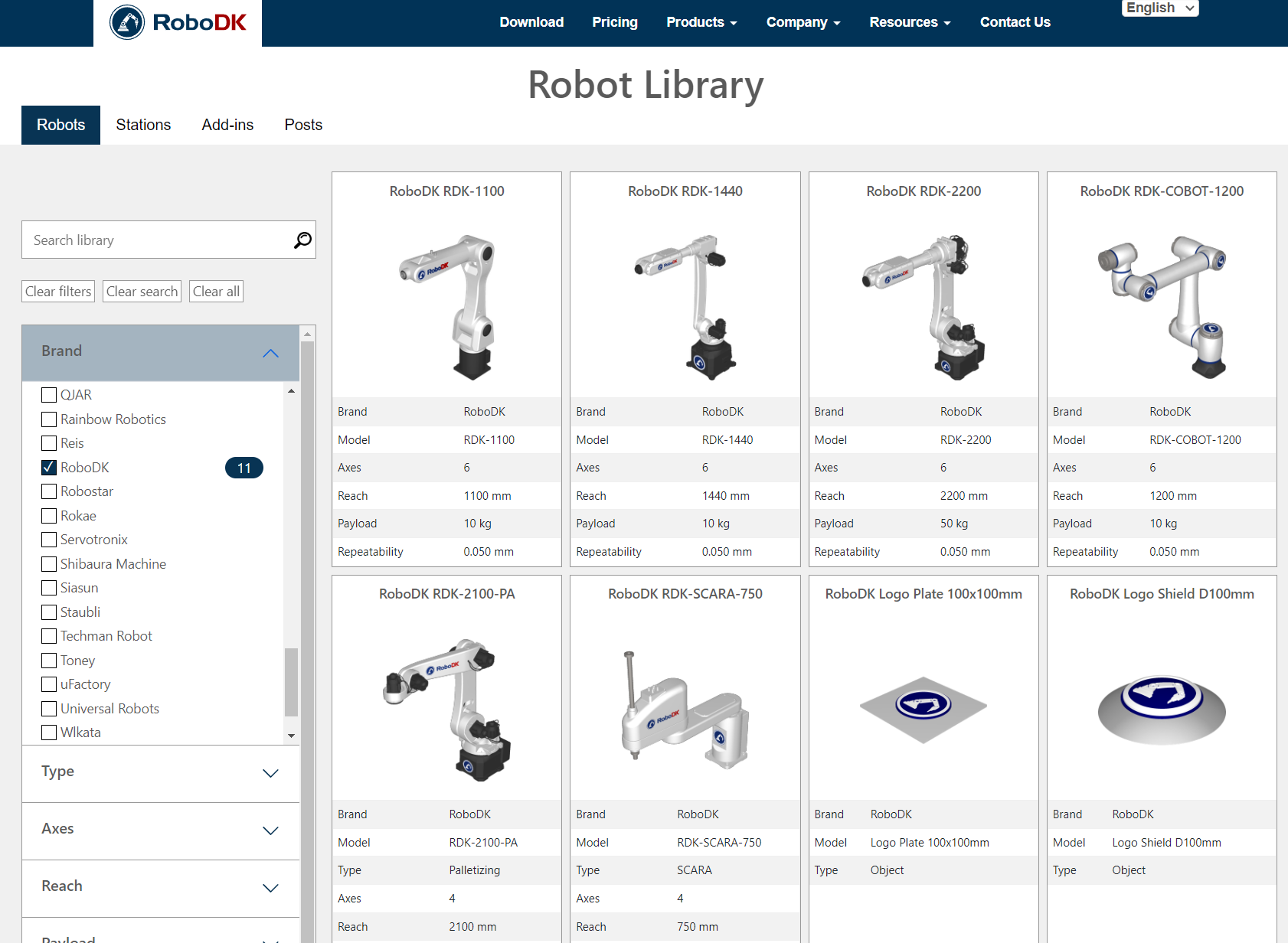
在RoboDK模型库中下载本范例,在RoboDK中打开本范例文件:Painting-with-UR10.rdk。
新建项目章节展示了如何在RoboDK中创建一个包含优傲UR10机器人的离线编程项目,实现喷涂应用。本范例概括了使用RoboDK仿真与离线编程的关键特点,包括:
1.如何在
2.如何
3.如何
4.如何
5.如何
6.如何
7.如何
8.如何
在RoboDK模型库中下载本范例,在RoboDK中打开本范例文件:Painting-with-UR10.rdk。