RoboDK
RoboDK 资源库汇集了机器人、范例、工具、外轴、插件和后处理器的资源。通过RoboDK 资源库下载机器人、查找范例、安装插件,或了解如何配置后处理器为控制器生成程序。
通过链接访问 RoboDK 资源库https://robodk.com.cn/cn/library。也可以在RoboDK 的工具栏中选择文件➔ 打开机器人库。
资源库搜索
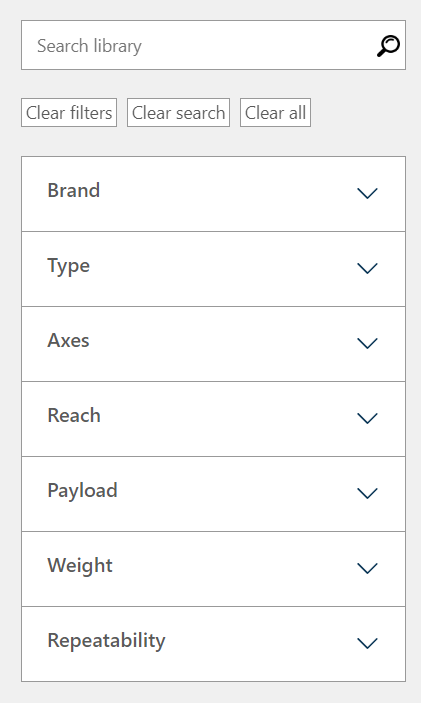
使用 RoboDK 资源库顶部的搜索栏,即可搜索机器人、范例、插件或后处理器。
以搜索机器人为例,通过品牌、类型或其他条件进行筛选。
资源库类别
RoboDK资源库划分为多个功能板块,包括机器人模型库、工作站、插件及后处理器。

可以在资源库中找到以下部分或选项卡:
1.机器人部分提供大量机器人设备和配件。其中包括行业领先品牌的机械臂、Delta 机器人、码垛机器人和 SCARA 机器人等机器人型号。该类别还重点介绍转台、定位器、线性导轨和龙门架等外轴。在末端工具方面,可以找到从夹爪和焊接枪到分发器、打磨机、磨床、主轴、工具快换装置和法兰适配器等各种工具。此外,为配合各种仿场景,该类别还提供形状、瓶子、箱、码垛、基座、相机、台面和样品部件等通用物体,确保为项目中所有机器人的仿真需求提供广泛的选择。
2.工作站范例部分提供预配置的机器人应用范例,涵盖各类机器人应用场景、工具及技术。这些范例工作站可作为项目基础模板或开发参考,应用范围包括:增材制造(3D打印)、物料搬运、点胶/喷涂、切割/铣削/钻孔、打磨/机加工、喷涂/码垛、焊接及其他多种工业场景,确保用户获得全面、多样化的机器人应用参考。
3.在插件部分,提供用于扩展和定制RoboDK功能的各类插件,包括:应用程序(基于Python开发)、插件(基于C++接口)、以上均由RoboDK官方及第三方开发者提供的选项,有些插件为独立付费模块,需单独购买并集成至RoboDK软件。
4.后处理器,该部分列出RoboDK默认支持的后处理器,用于确保生成的机器人程序与不同品牌机械臂、控制器及CNC设备兼容。后处理器可将RoboDK程序转换为特定机器人控制器识别的代码格式,支持的品牌包括:ABB、发那科(Fanuc)、库卡(KUKA)、安川莫托曼(Yaskawa Motoman)、史陶比尔(Staubli)、优傲机器人(Universal Robots)等主流机器人平台,保证设备的兼容性。
资源库操作
当鼠标悬停在库中的项目图片上时,会显示一个包含多个选项的菜单。
以下是菜单选项含义及操作:
1.详细:在新标签页中打开该项目的详细信息。
2.3D 视图:在RoboDK网页版(基于网页的RoboDK版本)中打开该项目。
3.下载:下载该项目的本地副本。