参考坐标系
参考坐标系用于定义某个物体(如对象、机器人或其他坐标系)相对于另一个已知位置和方向物体的空间关系。所有离线编程软件都需要通过参考坐标系来确定物体相对于机器人的位置,从而同步更新仿真环境。
在工作站中,你可以通过拖放参考坐标系或物体来建立特定关联(例如嵌套坐标系,如下图所示)。
在机器人应用中,通常通过标定3个点来定义参考坐标系相对于机器人的位置,从而在虚拟空间中定位物体。此操作可通过机器人示教器或RoboDK完成(详见定义参考坐标系章节)。
在RoboDK内还可以手动输入平移与旋转数值,包括选取不同的欧拉角旋转顺序。
Note:参考坐标系之间的相对关系称为位姿(Pose),包含位置(Position)和方向(Orientation)。RoboDK支持多种表示方式,可以用XYZ位置和欧拉角表示方向,也可以用XYZ位置和四元数值表示,或者用一个4x4矩阵表示。
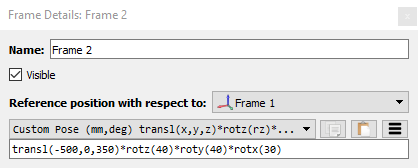
在默认设置下,RoboDK显示参考坐标系之间的关系为XYZ坐标,及X➔Y➔Z顺序的欧拉角格式。这意味着几何旋转将按照下面的顺序:
1.首先:围绕X轴旋转一个角度(浅蓝底色数值)
2.接着:围绕静态Y轴旋转一个角度(粉色底色数值)
3.最后:围绕静态Z轴旋转一个角度(黄色底色数值)
发那科(Fanuc)与安川(Motoman)机器人的控制器接受以上所描述的旋转格式。但是,其他机器人生产商使用的是不同的旋转顺序。
Note: RoboDK自动为每个机器人选择正确的旋转格式。
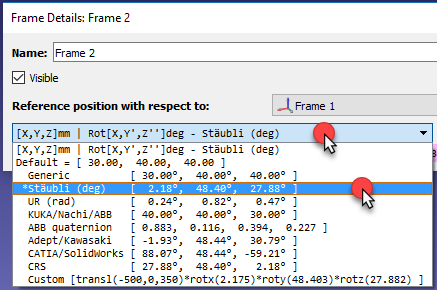
在参考坐标系详情窗口中(双击一个坐标系即可打开),可以从下拉菜单中选取不同的旋转格式。
Tip:生成机器人程序时,RoboDK会根据机器人型号自动匹配控制器所需的格式,并通过后处理器生成正确的程序代码,用户无需手动转换(更多信息详见机器人后处理器章节)。
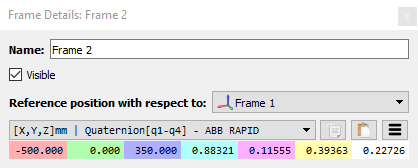
例如,史陶比尔(Stäubli)机器人使用X➔Y’➔Z’’顺序,库卡(KUKA)机器人与那智(Nachi)机器人使用Z➔Y’➔X’’顺序。另外,ABB机器人控制器使用四元数旋转格式,这需要4个数值来定义一个旋转:
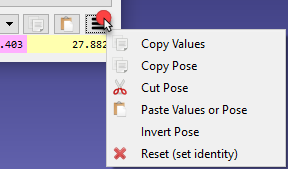
用户还可以自定义姿态格式。可通过脚本手动输入(选择"Script"选项),如下图所示: