Navigation offcanvas
使用"链接机器人"按钮上的下拉箭头调出可用机器人菜单,并将模拟链接至其中一台。若按钮处于选中状态(机器人已链接),再次点击将导致机器人与模拟断开连接。
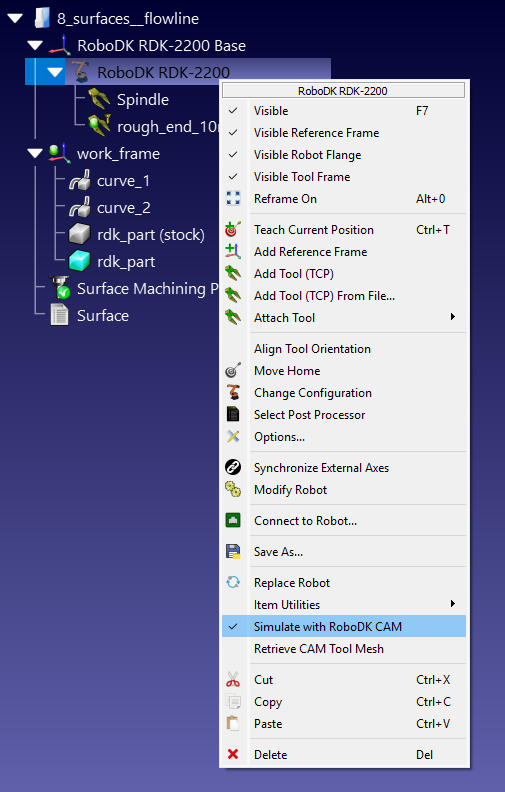
也可通过工作站树的上下文菜单实现机器人与模拟的关联。
机器人与仿真建立链接后,RoboDK窗口中的任何机器人动作都将被仿真器作为工具运动重复执行。无论该动作源自RoboDK程序、Python脚本还是鼠标手动操作。
注:CAM-Link机器人菜单中也提供机器人链接命令。