机器人加工的碰撞规避
你可以为机器人加工项目启用自动避碰功能。RoboDK将自动旋转工具以寻找无碰撞路径。
Tip:机器人加工路径的碰撞检测可能需要较长时间计算。请务必合理缩小碰撞地图范围,以加速碰撞检测与避障过程。
请按照以下步骤为机器加工项目启用自动碰撞检查和防碰撞功能:
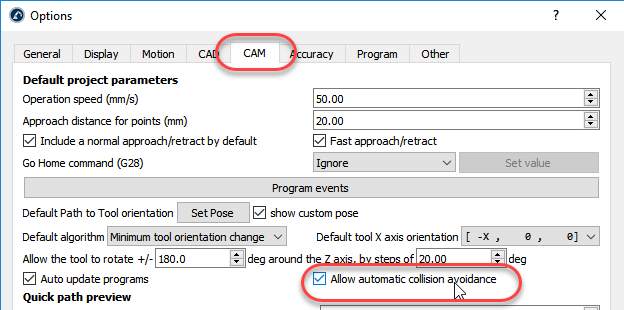
1.在菜单栏中选择:工具➔ 选项➔CAM选项卡
2.在默认参数区域勾选:允许自动避免碰撞
3.双击当前的机器加工项目、3D 打印项目、曲线跟踪项目或点跟踪项目。
4.勾选优化参数模块:避障:这将按照优化参数中的描述,通过围绕 Z 轴更换刀具方向,启用自动避免碰撞功能。
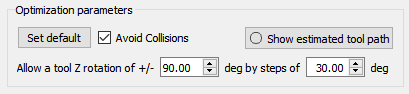
Important:此选项将通过绕刀具的Z轴旋转来自动避免碰撞。请确保未将刀具切削刃设置为与零件进行碰撞检测。如需检测刀柄与零件之间的碰撞,可能需要将主轴拆分为两个刀具(一个用于碰撞检测,另一个包含切削刃等额外可视化信息)。