可自定义任意物体间的碰撞检测关系。
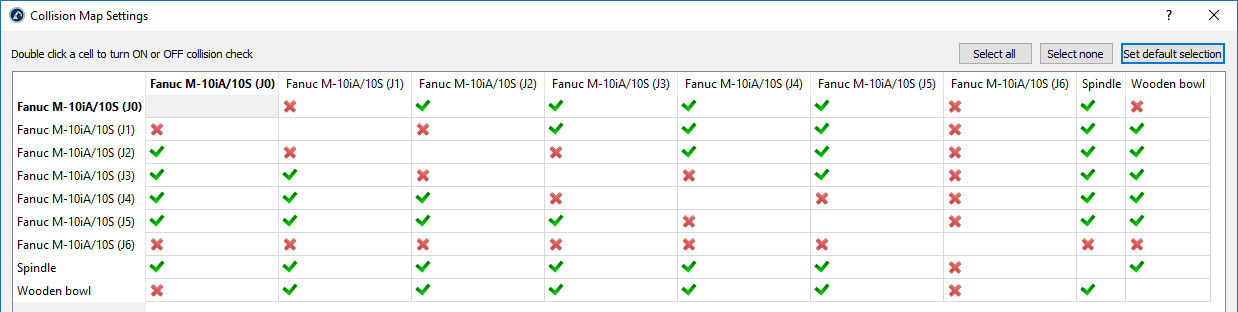
选择工具➔ 碰撞地图,可查看工作站中所有运动物体间的碰撞检测状态。双击矩阵单元格即可激活/关闭特定物体对的碰撞检测。双击机器人单元可启用或关闭该关系的碰撞检查。选择 "设置默认选择 "可自动启用保守检测方案。
碰撞地图,可查看工作站中所有运动物体间的碰撞检测状态。双击矩阵单元格即可激活/关闭特定物体对的碰撞检测。双击机器人单元可启用或关闭该关系的碰撞检查。选择 "设置默认选择 "可自动启用保守检测方案。
默认情况下,RoboDK 会检查站内所有移动物体之间的碰撞,包括所有机器人链接、物体和工具。作为例外,连续的机器人关节不会被检查碰撞,因为它们可能始终处于接触状态。
Tip:双击矩阵对角线上的单元格,可一键切换该物体与所有其他物体的碰撞检测状态
Tip:若碰撞检测导致仿真卡顿,可减少检测对象数量以降低CPU负载