碰撞检测
在菜单栏中选择:工具➔
安全检查程序是否发生碰撞的步骤:
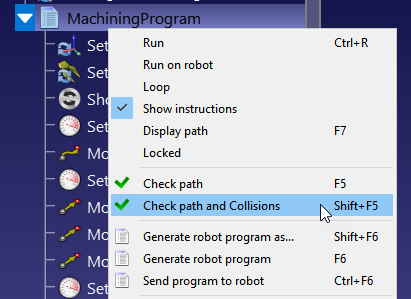
1.右键单击当前的程序。
2.选择这个选项:检查路径和碰撞(Shift+F5)。该选项可快速检查路径是否可行(与检查路径 - F5 相同),然后验证是否存在碰撞。
Important:在菜单栏中选择:工具→选项→运动选项卡,取消勾选“当检测到碰撞时停止机器人”选项。
Tip:确保在RoboDK中准确建模机器人单元。同时建议将3D几何模型放大,以安全地预防碰撞。
Note:如果希望在检测到碰撞时仍能继续仿真程序,可进入工具➔选项➔ 运动,取消勾选"当检测到碰撞时停止机器人"选项。
碰撞地图
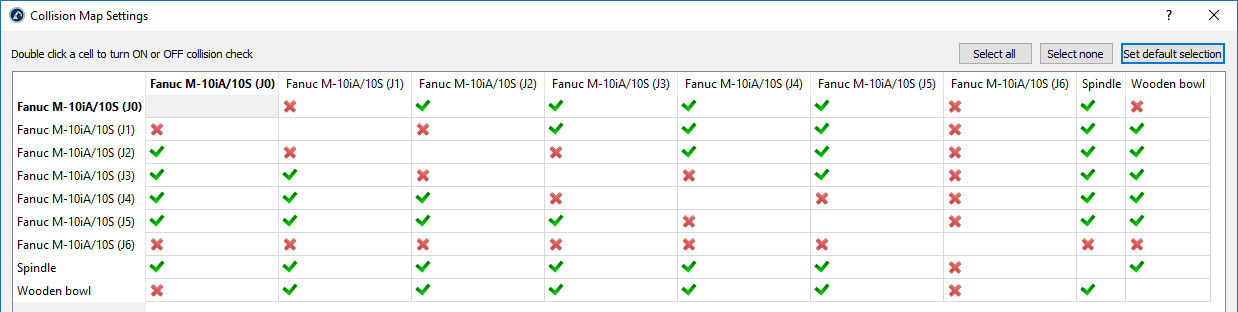
可自定义任意物体间的碰撞检测关系。
选择工具➔
默认情况下,RoboDK 会检查站内所有移动物体之间的碰撞,包括所有机器人链接、物体和工具。作为例外,连续的机器人关节不会被检查碰撞,因为它们可能始终处于接触状态。
Tip:双击矩阵对角线上的单元格,可一键切换该物体与所有其他物体的碰撞检测状态
Tip:若碰撞检测导致仿真卡顿,可减少检测对象数量以降低CPU负载
碰撞检测加速
碰撞检测速度受多重因素影响:
1.碰撞地图中的检查对数:碰撞地图中启用的检测对越少,速度越快。
2.碰撞检测的步长:碰撞步长可在工具➔ 选项➔运动菜单中设置。直线运动的步长以毫米为单位,关节运动的步长以度为单位。步长越大,检测越快,但精度会降低。
3.计算机算力:CPU 性能越强,或者线程数越多,检测越快。
4.3D模型复杂程度:曲面等精细几何结构会增加计算负荷,减少三角面片数量可提速
Tip:在工具-选项-CAD中调整STEP/IGES导入精度,降低模型细节层级。这将在你的RoboDK 项目中创建更轻的物体。具有较轻物体的工作站将帮助你加快仿真和碰撞检查的速度。你还将获得更小的 RDK 文件。
优化建议:
1.优先选用STEP/IGES格式而非STL(性能更优)。
2.尽可能简化几何形状。
3.使用简化网格插件自动简化复杂几何体:https://robodk.com.cn/addin/cn/com.robodk.app.simplifymesh
4.开启边界框的预览(工具➔选项➔其他➔绘制边界框)检查模型分组合理性。
5.禁止使用工具➔选项➔显示中的"简化对象…"功能(会导致生成超大边界框)。
6.在环境中设置碰撞专用物体:复制物体并移除无法触及的表面,或导入几何形状更简单的版本(如凸壳)。仅将原始物体用于视觉目的,并将其排除在碰撞图之外。
7.通过API动态控制碰撞检测对象。