关节限制约束
在创建PRM路线图时,通常不需要使用机器人的全部工作空间。通过限制关节运动范围,可显著提升建图效率,并确保采样点集中在任务相关区域。
6轴机器人最常限制的两个关节:
1.关节 1(底座旋转关节)--限制其范围可防止机器人过度偏离工作区两侧。
2.关节 3(肘关节)--限制其范围可避免肘部在"向上"和"向下"配置间切换。
操作步骤:
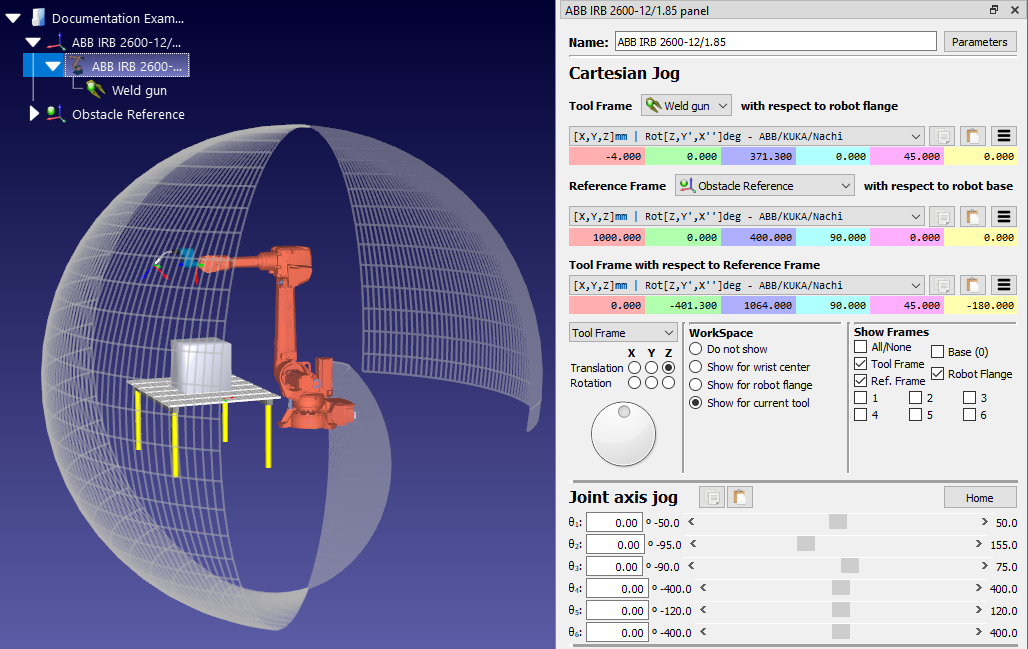
1.右键点击工作站树中的机器人模型(如ABB IRB 2600-12/1.85),选择 选项...(或直接双击机器人名称)
2.在 手动调节关节轴 区域,拖动需要限制关节的滑块(如θ₁和θ₃),找到合适的下限位置
3.双击关节下限数值(如θ₁默认值-180),在弹出的设置机器人关节-设置关节下限 面板中调整
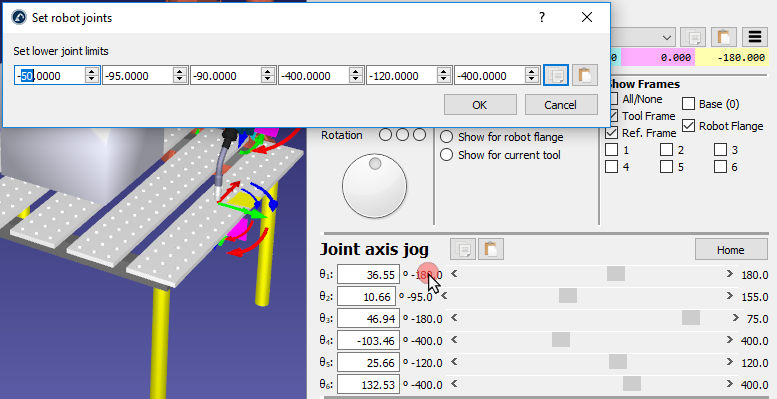
4.将关节下限设为θ1 = -50 和θ3 = -90。
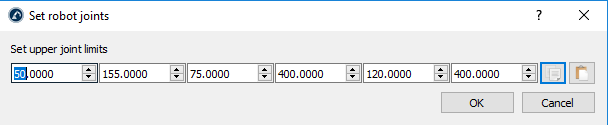
5.更改关节限位,然后单击 "确定"。
6.使用与关节上限相同的过程,设置θ1 = 50。
这一变化可通过查看机器人的可达工作空间来观察。在机器人面板的“工作空间”部分选择“显示当前工具”,即可展示工作空间。此时仅会显示新关节限制下机器人可到达的工作区域。