程序链接
PRM运动规划器可通过类似方式链接两个独立程序,生成包含无碰撞过渡路径的新主程序。
以下以焊接为例演示操作流程:
1.创建4个子目标点,作为 "物体参考 "坐标系的子坐标系(右键单击工作站树中的 "物体参考",选中启用参考系)。然后通过选择程序➔ 
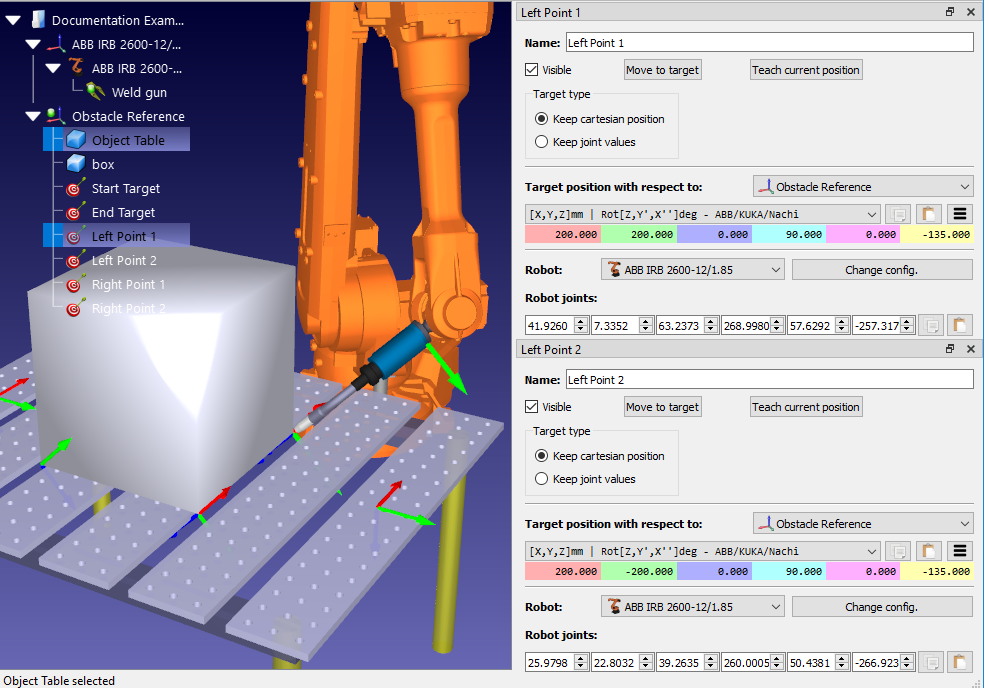
2.在工作站中依次选择每个目标,然后输入以下名称和数值。要更改目标名称,请按 F2 键或右键单击目标并选择重命名。要更改目标值,请按 F3 键弹出目标面板,或右键单击目标并选择选项。在 "目标点位置相对于 "输入以下数值:
a.名称:"Left Point 1 "值: 200、200、0、90、0、-135
b.名称:" Left Point 2"值: 200、-200、0、90、0、-135
c.名称:" Left Point 3"值:-200, 200, 0, 90, 0, 135
d.名称:" Left Point 4 "值:-200, -200, 0, 90, 0, 135
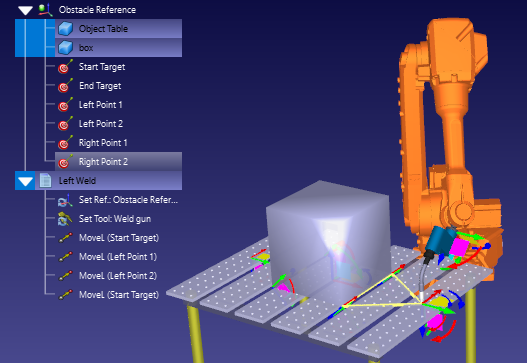
3.创建第一个程序:
a.转到程序 ➔
b.将程序重命名为 "Left Weld"(左侧焊接),首先在站树中选择该程序,然后按 F2 或右键单击并选择重命名。
c.将以下目标添加为线性指令,首先在站树中选择目标,然后选择程序➔
4.以同样的方式创建第二个名为 "Right Weld "的程序,这次添加以下目标:end target、left point 2、left point 2、end target。
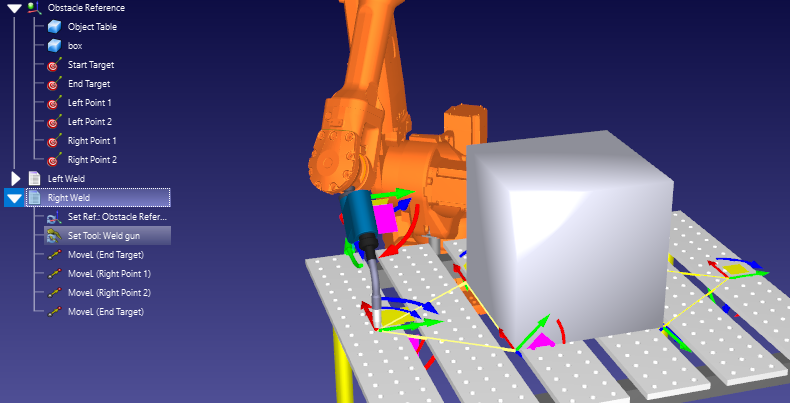
请注意,这两个示例程序并未包含控制焊枪启停的指令。在实际应用中,必须添加这些命令。
要使用运动规划器连接任意两个程序,请使用以下流程:
1.使用上一节(链接目标)所述的两种方法中的任何一种选择这两个程序。
2.右键点击任一程序并选择Link selected programs。如果打开了collision-free motion planner面板,同样可以通过点击Link selected targets/programs实现。
此时会自动生成一个名为"主程序"的新程序,运行第一个程序,进行无碰撞移动,然后运行第二个程序。这个主程序可以像其他程序一样进行修改和重命名。