设置运动规划
要使用运动规划器,必须有一个机器人,同时配备工具。工作空间中至少需要一个物体,否则无需进行碰撞规避。建议至少设置两个目标点作为生成的避障路径的起点和终点位置。
示例焊接设置可通过以下流程创建:
1.选择一个机器人:
a.在菜单栏中选择:文件➔
b.使用筛选器查找机器人。例如,选择 ABB IRB 2600-12/1.85(选择以下筛选条件:ABB(品牌)、10-20 千克负载和1500-2000 毫米触距
c.选择 "下载",双击文件,机器人会显示在RoboDK工作站中
2.选择工具:
a.从同一在线资源库中,按类型筛选➔工具(先点击:重置筛选器,删除之前的筛选器)
b.下载工具,如 " Weld Gun"
c.双击文件,工具会自动连接到机器人上
d.加载工具后,可关闭在线资源库
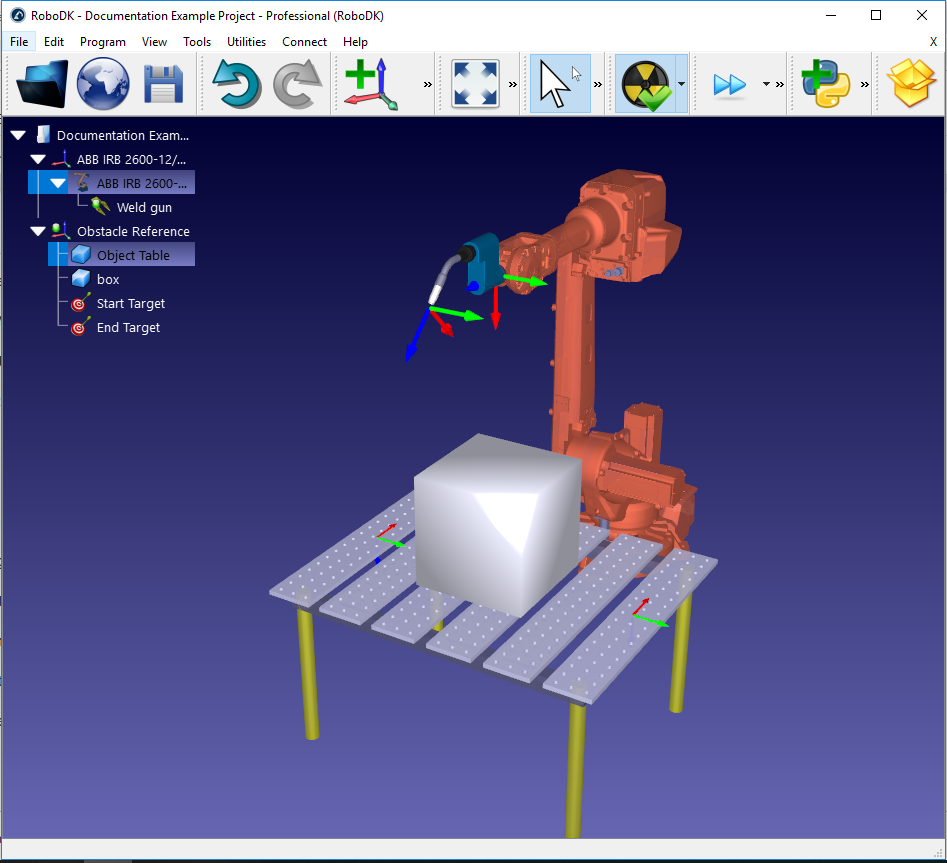
3.添加参考坐标系:
a.选择程序➔
b.在工作站中选择新的参考坐标系,按 F2 将其重命名为 "Obstacle Reference”
4.添加一些物体:
a.在菜单栏中选择:文件➔
b.导入一个物体,如 "Object Table.wrl"。
c.将物体拖放到工作站中的 "Obstacle Reference"内。
d.导入另一个物体,如"box.stl",并将其也拖到Obstacle Reference内。
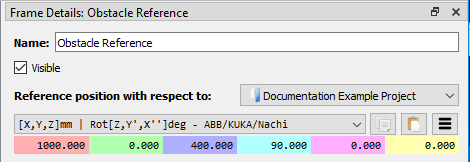
e.通过以下操作将桌子移到机器人面前:
i.右键单击Obstacle Reference,选择 "选项…"(或直接双击Obstacle Reference),弹出坐标详情面板
ii.在名为 "参考系的位置相对于"的面板中输入以下值:1000、0、400、90、0、0
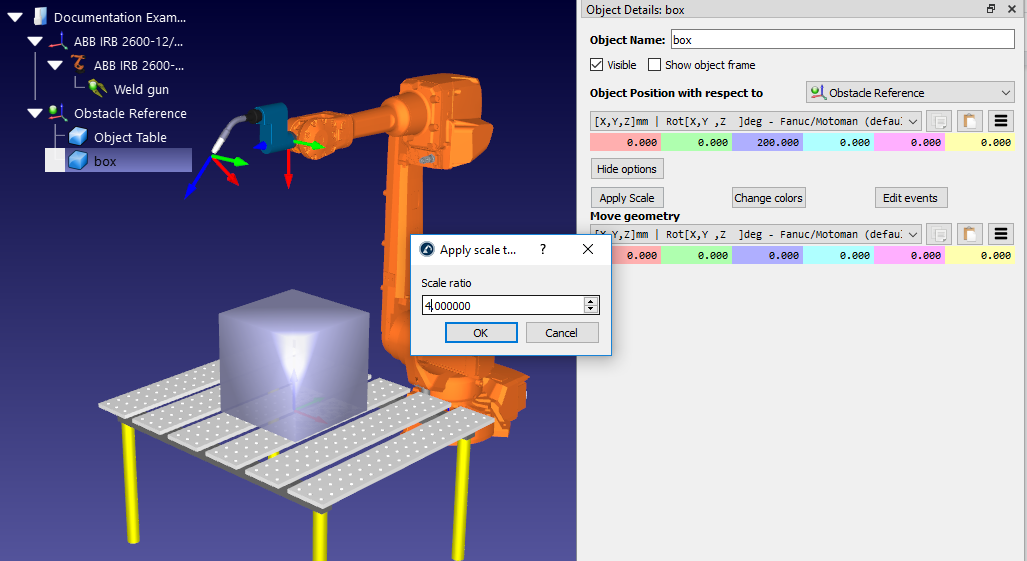
f.必要的话,可按照以下步骤放大 "箱"的尺寸和位置:
iii.右键单击工作站树中的物体,选择 "选项"(或直接双击box),弹出 "物体详情"面板
iv.单击 "更多选项➔应用缩放比例,然后在缩放比例中输入 "4.0"。
v.在名为 "物体位置相对于 "的面板中输入以下值,将箱移动到台面上:0, 0, 200, 0, 0, 0
5.创建目标:
a.在主菜单栏中选择:程序➔
b.在工作站中选择该目标,然后按F2键命名为 "start target
c.然后这样做来移动目标:
vi.右键单击工作站树中start target目标,选择 "选项"(或按 F3),弹出 "start target "面板。
vii.在目标点位置相对于Obstacle Reference面板中输入以下值:500, 0, 0, 90, 0, 180
d.用同样的方法创建第二个目标,并将其重命名为 "end target"。使用与之前相同的方法,将其移动到以下位置:-500, 0, 0, 90, 0, 180