相机参数设置
通过相机设置,你可以自定义相机的参数,从而在 RoboDK 的模拟环境中获得真实的相机视图。
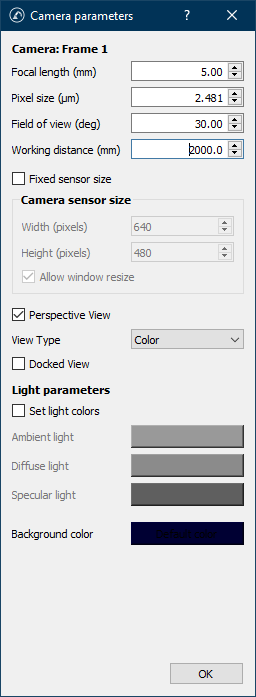
修改相机的一些参数设置,请在工作站中右击相机,然后选择:相机设置。RoboDK 为新添加的相机提供以下默认设置:
●摄像机:提供锚点名称(根据你的参考坐标系名称变化,比如Frame 1)。
●焦距 (mm):单位是毫米(5.00),影响像素尺寸。
●像素尺寸 (μm):单位为微米(2.481)。更改该值会影响视野。
●视野(度):单位为度(30.0)。这会影响相机可感知区域的大小。更改该值会影响像素大小。
●工作距离 (mm):单位为毫米(2000.0)。这是相机可以感知环境的距离,超过这个距离的物体将不会成为图像的一部分。
●固定传感器尺寸:如果不选中,相机传感器尺寸(或分辨率)由相机预览窗口的大小来设置,用户可以调整预览窗口的大小。
●摄像机传感器尺寸:对于固定传感器尺寸,以像素为单位提供相机的宽度和高度。调整预览窗口大小不会影响尺寸。
●允许调整窗口大小:允许用户在不影响传感器尺寸的情况下调整预览窗口的大小。例如,将窗口大小调整为 720p,同时保持分辨率为 4K。
●透视图:取消选中此项将把相机变成正投影相机,消除透视。
●视图类型:确定相机视图类型,如彩色、灰度或深度。视图类型将根据相关数据改变输出图像。
●停靠视图:将预览窗口嵌入工具栏。
●自定义光源:覆盖默认环境光/漫反射/镜面反射参数(仅彩色模式有效)。
●背景颜色:无物体区域的填充颜色。