Navigation offcanvas
用于校准相机相对于机械臂法兰或工具的位姿关系。
RoboDK支持完整的手眼标定流程仿真,该流程同样适用于真实设备标定。
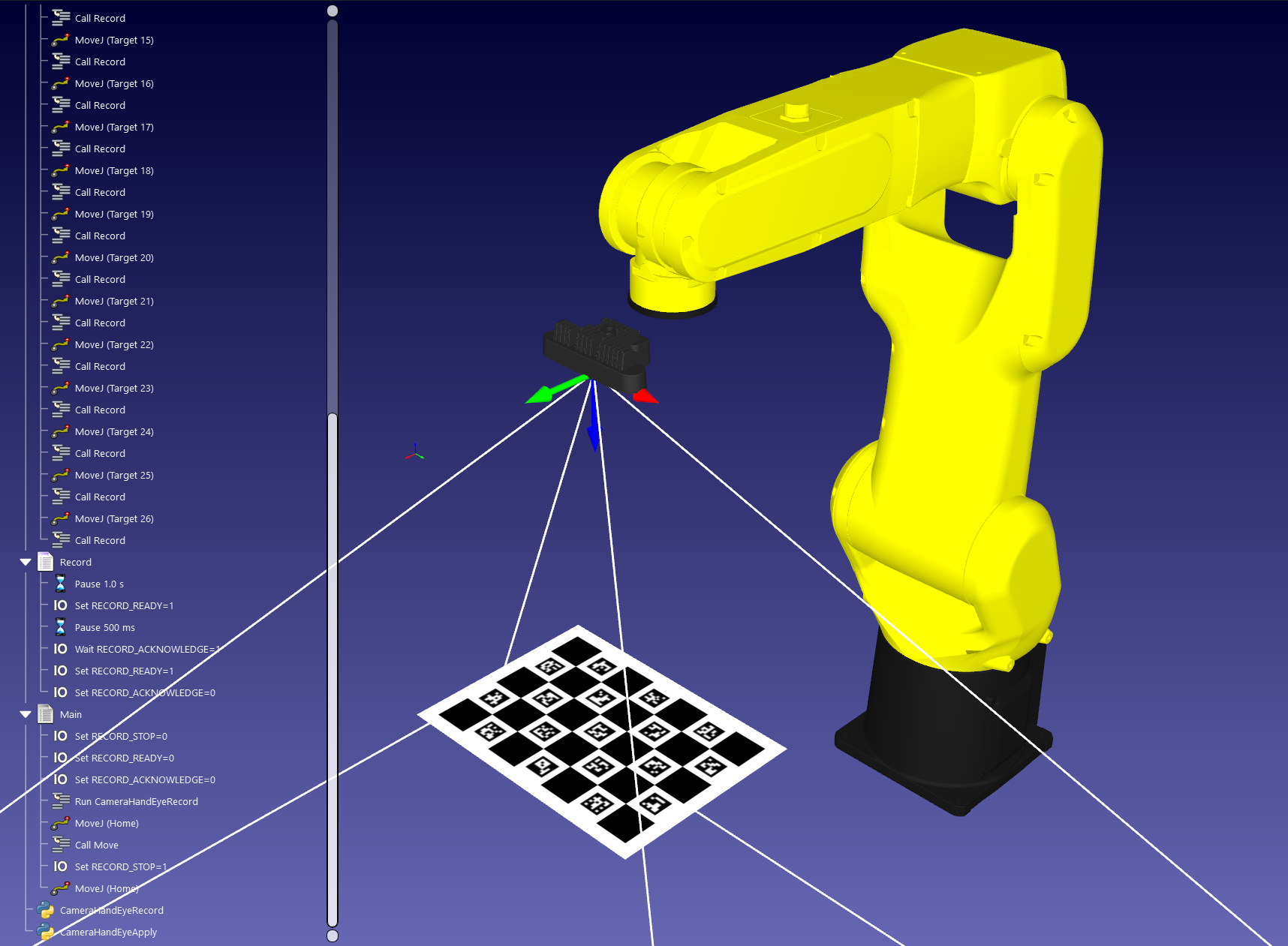
完整案例参考此API示例: https://robodk.com/doc/cn/PythonAPI/examples.html#camera-hand-eye-calibration
Navigation offcanvas
用于校准相机相对于机械臂法兰或工具的位姿关系。
RoboDK支持完整的手眼标定流程仿真,该流程同样适用于真实设备标定。
完整案例参考此API示例: https://robodk.com/doc/cn/PythonAPI/examples.html#camera-hand-eye-calibration