3
启动项目时,请先在默认库中选择RoboDK的三轴模具加工案例。
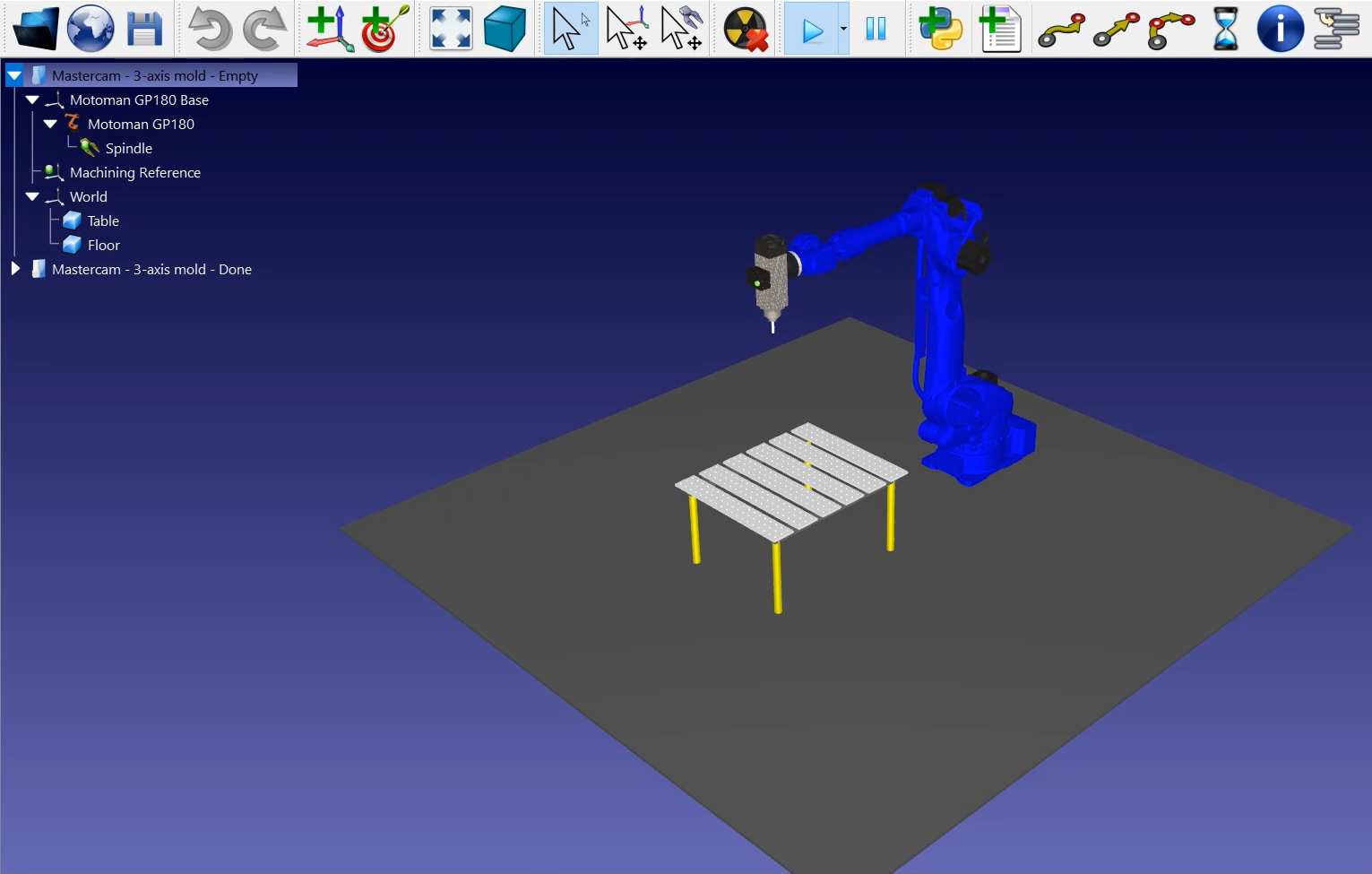
RoboDK 设置
本案例采用安川GP180机器人,主轴安装切削刀具,工作台用于固定加工件。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
加载示例:
1.选择:文件 ➔
2.从RoboDK 的示例部分找到3 轴机器加工示例:
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
加载完成后,打开Mastercam并载入项目文件:
C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcam
Mastercam 的刀具路径
在Mastercam中打开三维模型并启动切削仿真。本案例的金属模具件已通过Mastercam工具生成切削路径。
为简化演示,实际加工中的多道工序已被大幅缩减。真实场景下路径密度更高,刀具运动轨迹将更密集
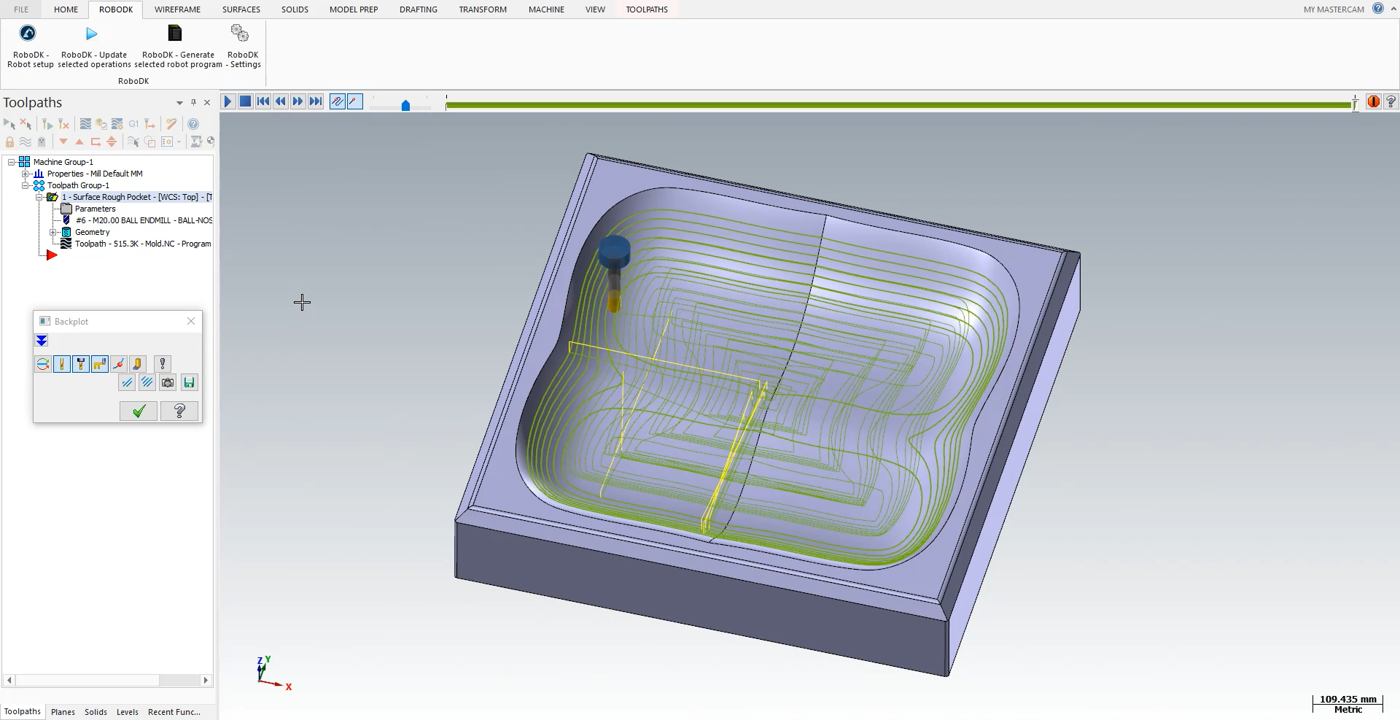
Mastercam 切割仿真会向你展示工具在程序中需要做的每一个动作。
按以下步骤将工件导入RoboDK:
1.点击RoboDK标签页➔Robot setup
2.选择Load Part。
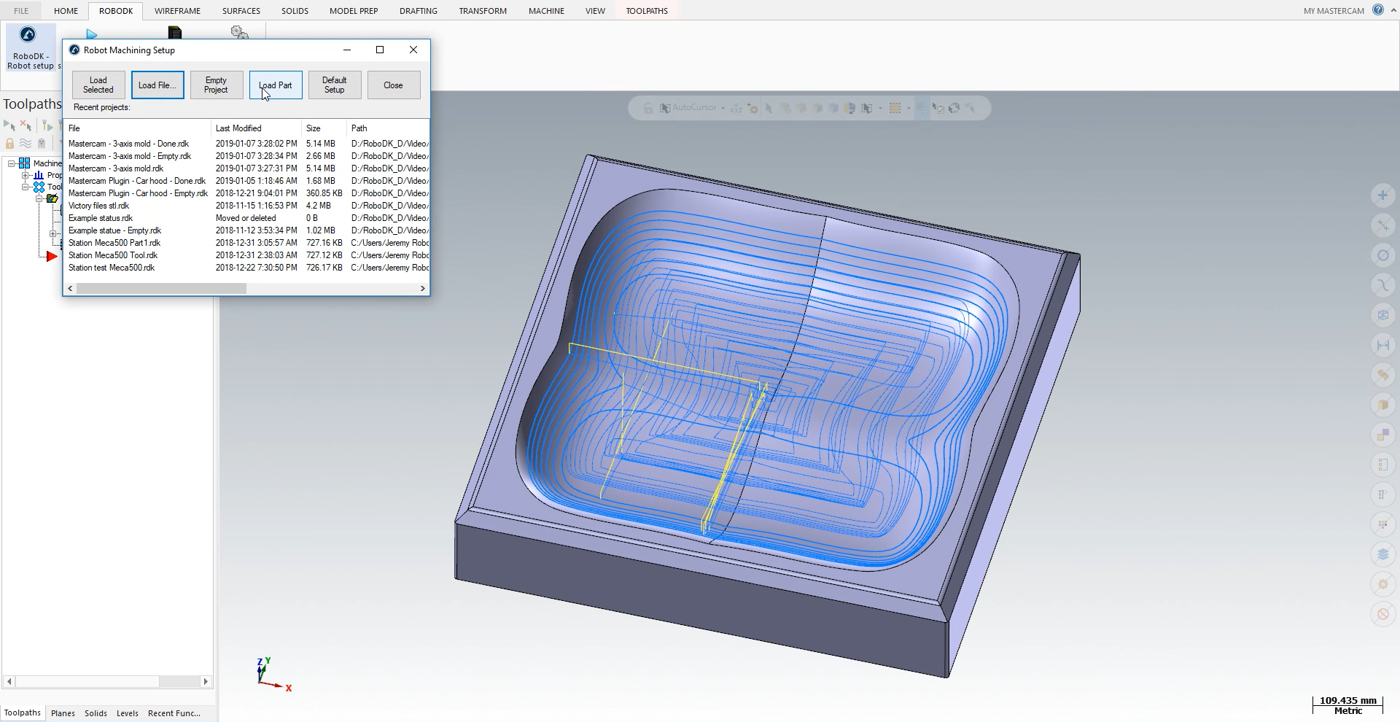
在 RoboDK 工作站台面的激活参考坐标系(机器加工参考系)上,工件将自动定位到工作站台面的加工坐标系上。
下一步是将切割路径从 Mastercam 导入 RoboDK。
1.在 Mastercam 中选择RoboDK 选项卡。
2.选择RoboDK – Update selected operations。
3.返回RoboDK界面。
RoboDK 中的机器加工
导入完成后,加工路径将显示在模具参考系上。
可调整切入/切出距离(本例建议100mm),若存在碰撞风险,可在机器人工作范围内任意增大该值。
下一步是通过选择
Note:按住空格键或点击
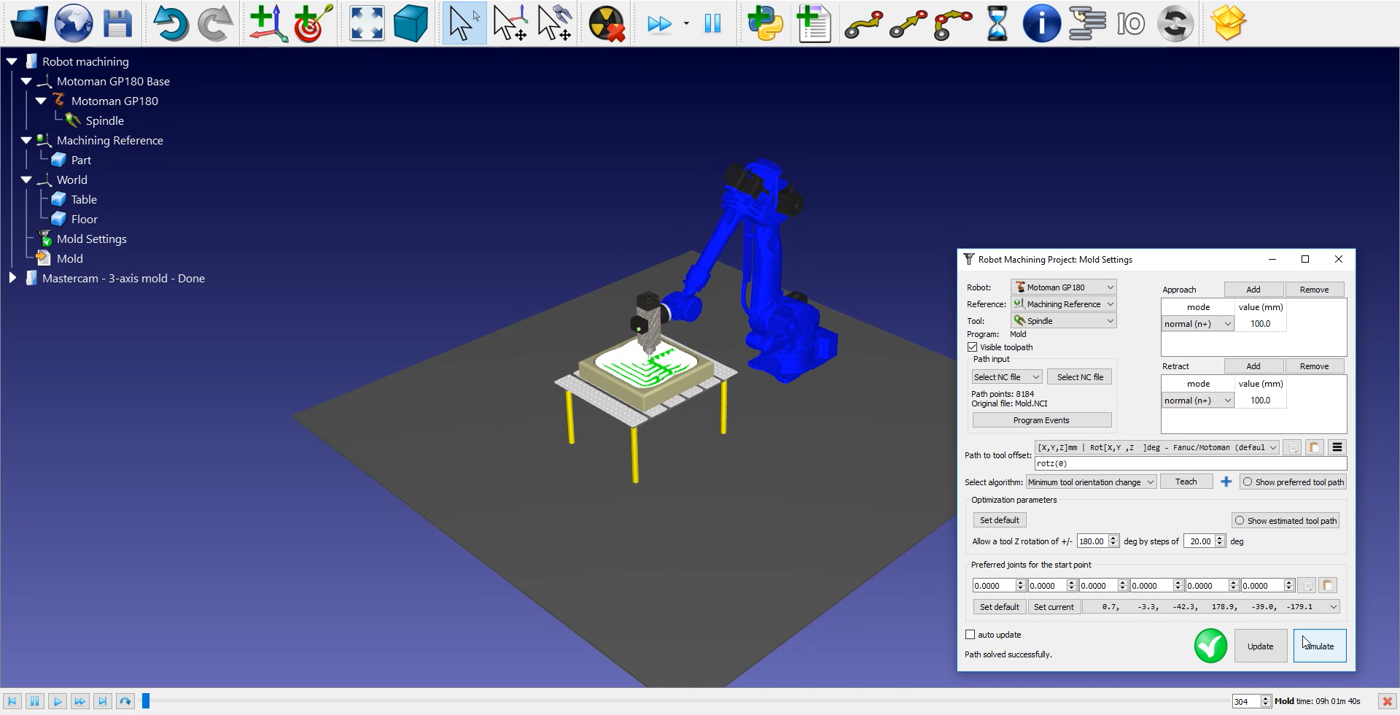
Note:你可以沿路径调整工具的方向。在本例中,你可能想要的唯一修改就是围绕 Z 轴旋转工具,但建议使用标准方向。
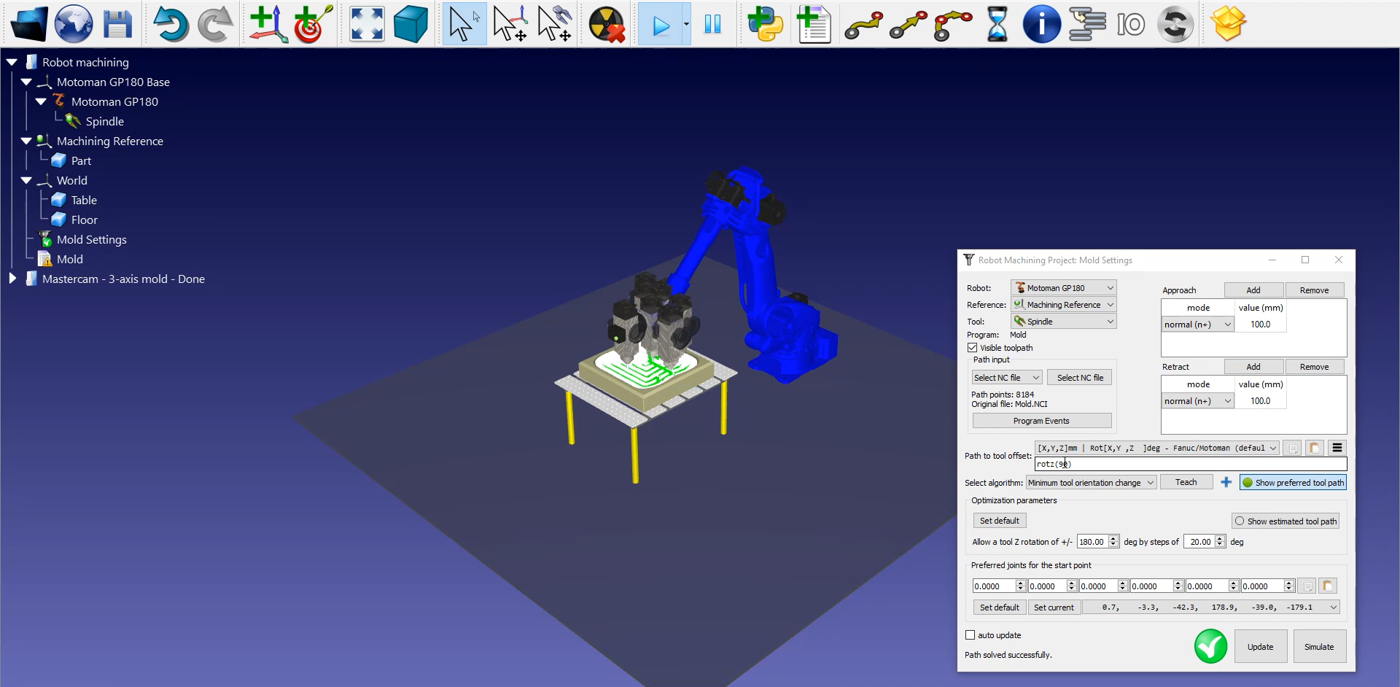
刀具姿态调整:
1.双击
2.选择:显示优选的工具路径。如下图所示,会出现一些RoboDK预估的工具虚影。
3.滚动鼠标滚轮调整rotZ值至90度,虚影将实时更新。
4.点击更新➔ 模拟。
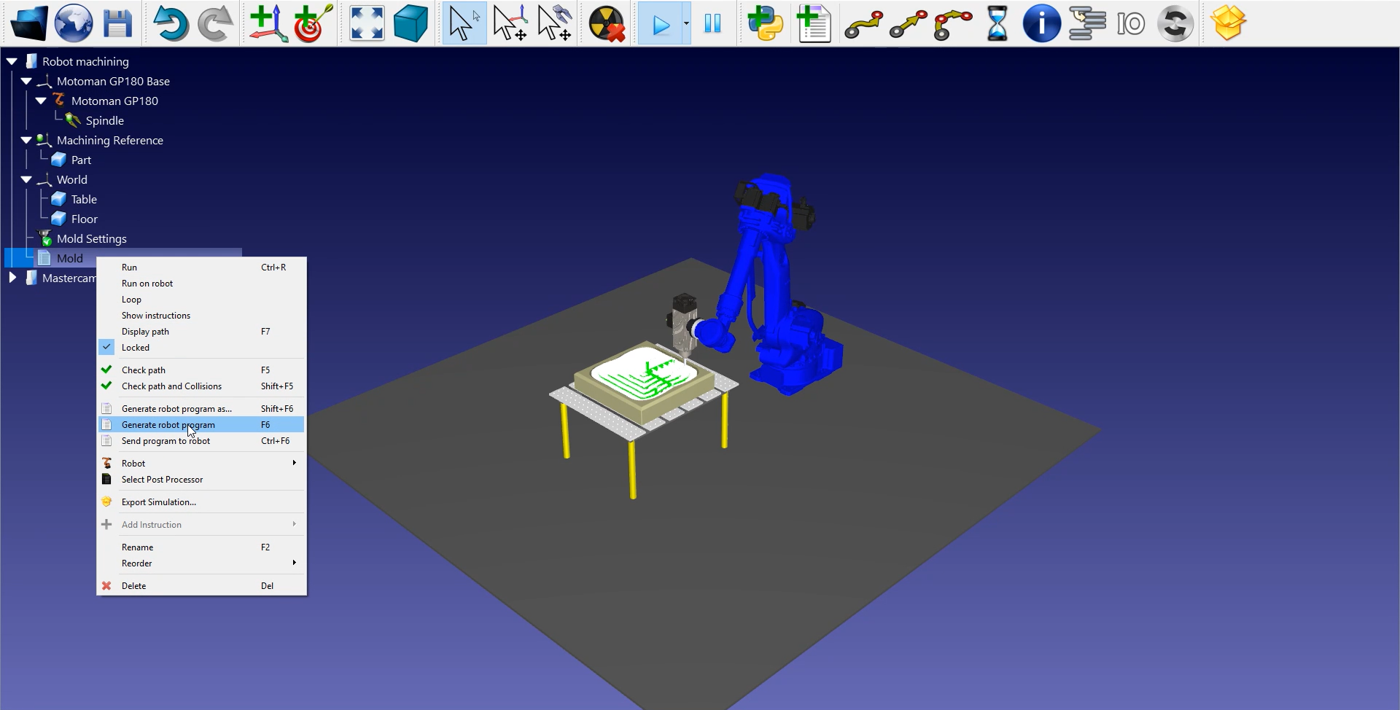
要生成机器人程序,请确保使用正确的后处理器。双击
最后,右击
最终生成的JBI程序文件可直接传输至机器人控制器执行。