RoboDK
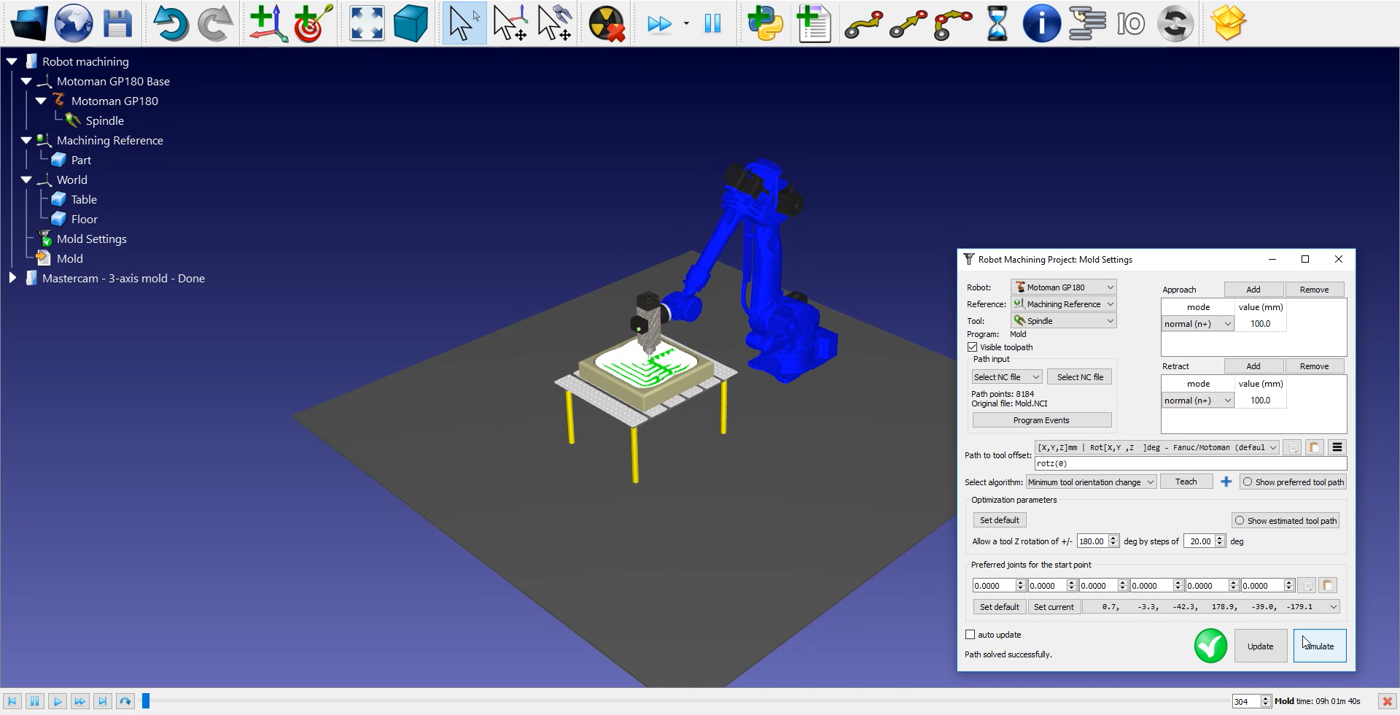
导入完成后,加工路径将显示在模具参考系上。
可调整切入/切出距离(本例建议100mm),若存在碰撞风险,可在机器人工作范围内任意增大该值。
下一步是通过选择
Note:按住空格键或点击
Note:你可以沿路径调整工具的方向。在本例中,你可能想要的唯一修改就是围绕 Z 轴旋转工具,但建议使用标准方向。
刀具姿态调整:
1.双击
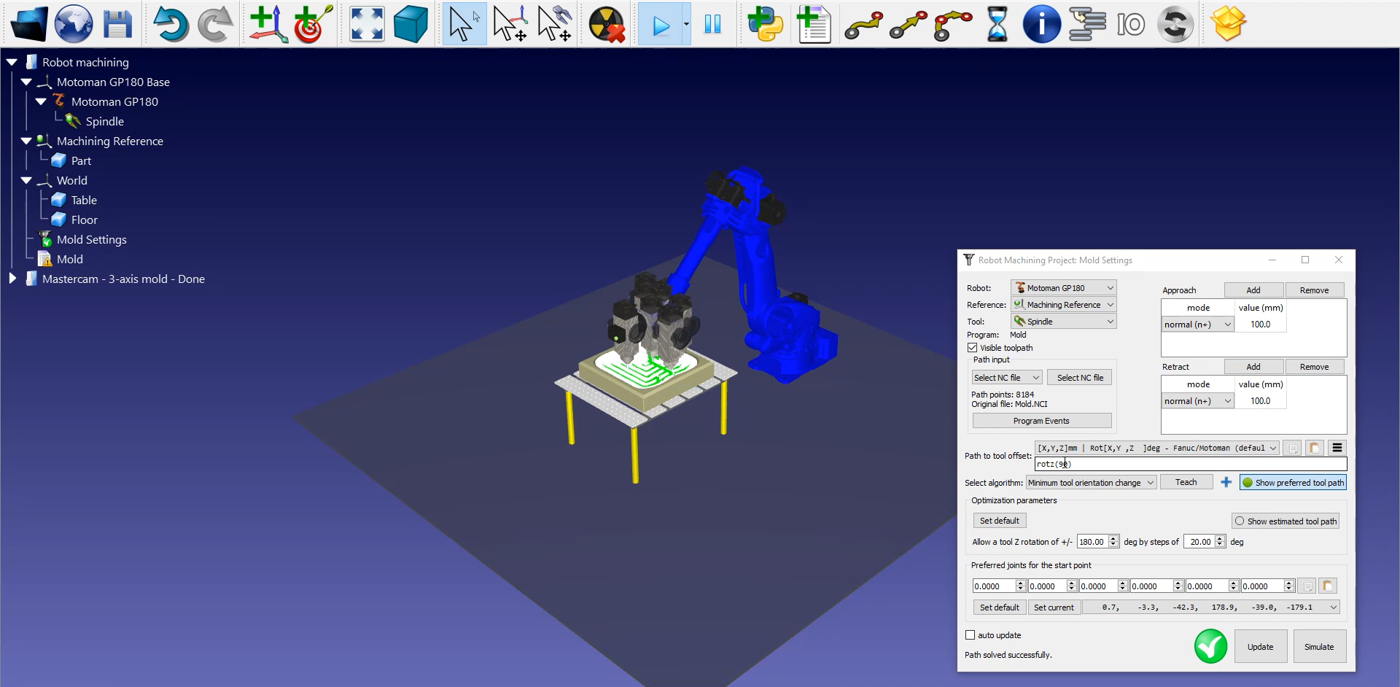
2.选择:显示优选的工具路径。如下图所示,会出现一些RoboDK预估的工具虚影。
3.滚动鼠标滚轮调整rotZ值至90度,虚影将实时更新。
4.点击更新➔ 模拟。
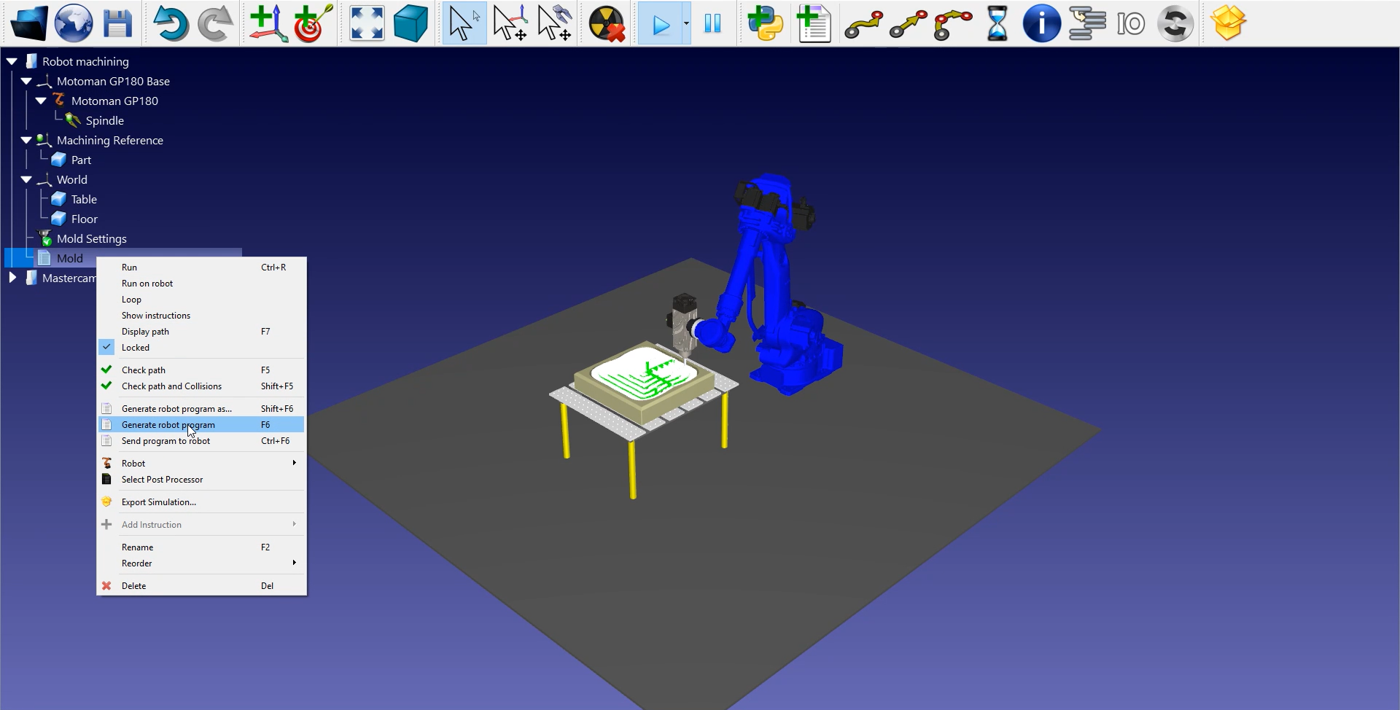
要生成机器人程序,请确保使用正确的后处理器。双击
最后,右击
最终生成的JBI程序文件可直接传输至机器人控制器执行。