机器加工项目(
本节介绍如何自定义机器人设置和加工刀具路径,以成功完成机器人加工。RoboDK 的机器加工项目允许你将任何通用的 3 轴或 5 轴制造操作转换为机器人模拟和机器人程序。
由于我们直接加载了机器加工文件,所以一切都已自动创建和选择。我们还可以在 RoboDK 中自定义进给和缩回动作。
Note:在此路径找到RoboDK项目:C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
Tip:最好在 CAM 软件中保留一个小的趋近/退出动作。如有需要,你可以稍后在 RoboDK 中进行自定义。
创建机器人加工路径
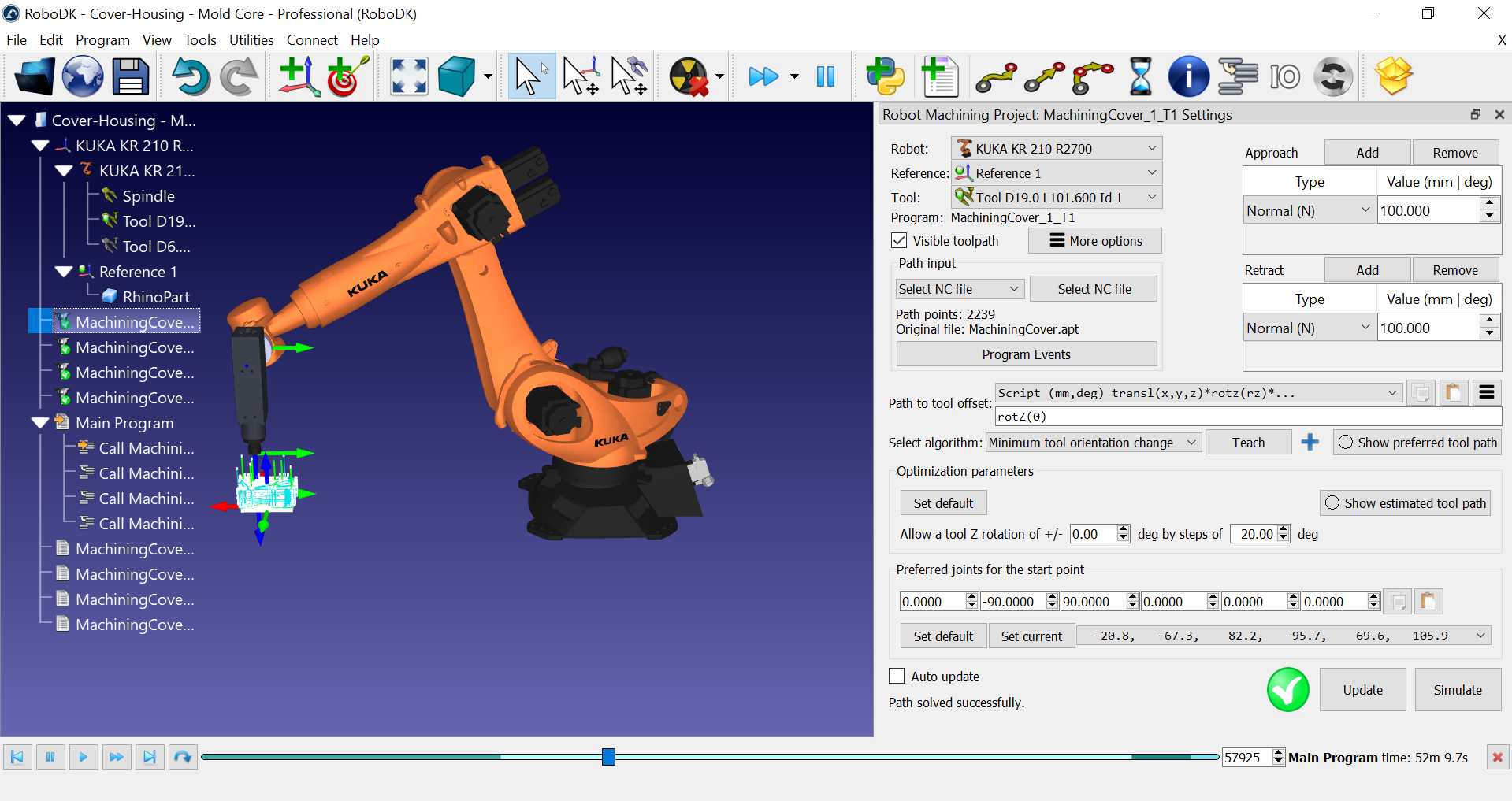
加载 APT 文件后,在机器人加工项目窗口选择:更新,即可在 RoboDK 中创建机器人加工仿真程序。这样你可以看到机器人是否可以执行加工操作。
本例是一个简单的 3 轴机器加工操作,默认设置为有效结果。通过机器人加工项目,你可以控制机器人在加工刀具路径上的行为。
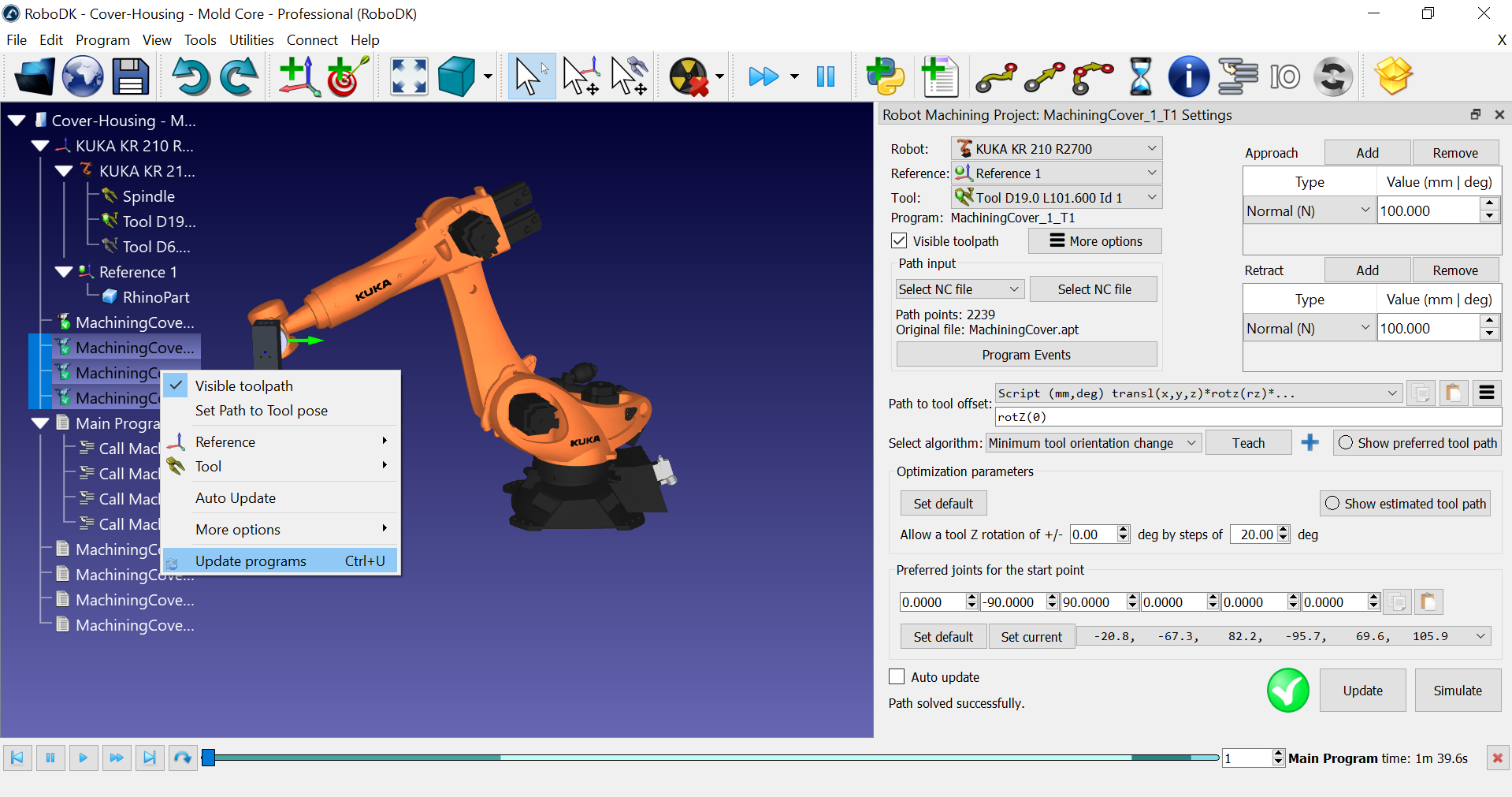
你可以按照以下步骤更新剩余的机器加工操作:
1.选择一个或多个机器加工操作(按住Shift 键可在树中生成多个项目)。
2.右键单击所选项目。
3.选择:更新程序。
RoboDK 在计算机器人加工路径时,会为每个加工操作创建一个新的机器人程序。白色图标代表机器人程序。这些程序由 RoboDK 自动创建。你可以双击树形图上的每个程序,对其进行单独仿真。
RoboDK 还会自动创建一个主程序,你可以依次运行该程序来仿真所有的机器加工操作。
机器人加工操作仿真
你可以双击主程序来仿真整个机器人加工过程,也可以双击任意子程序进行单独仿真。
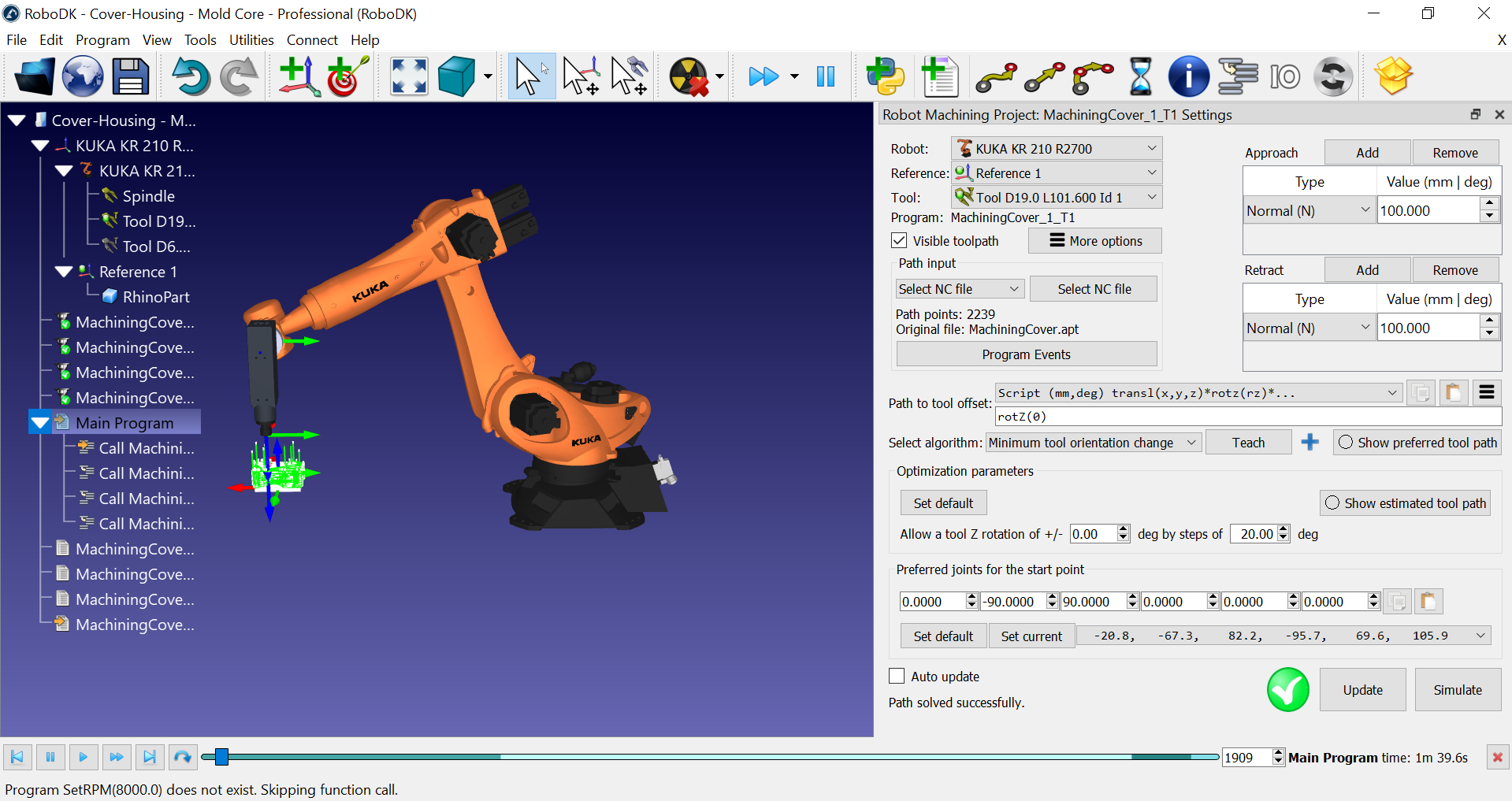
Tip:右键单击程序并选择:显示路径,即可显示黄色轨迹。
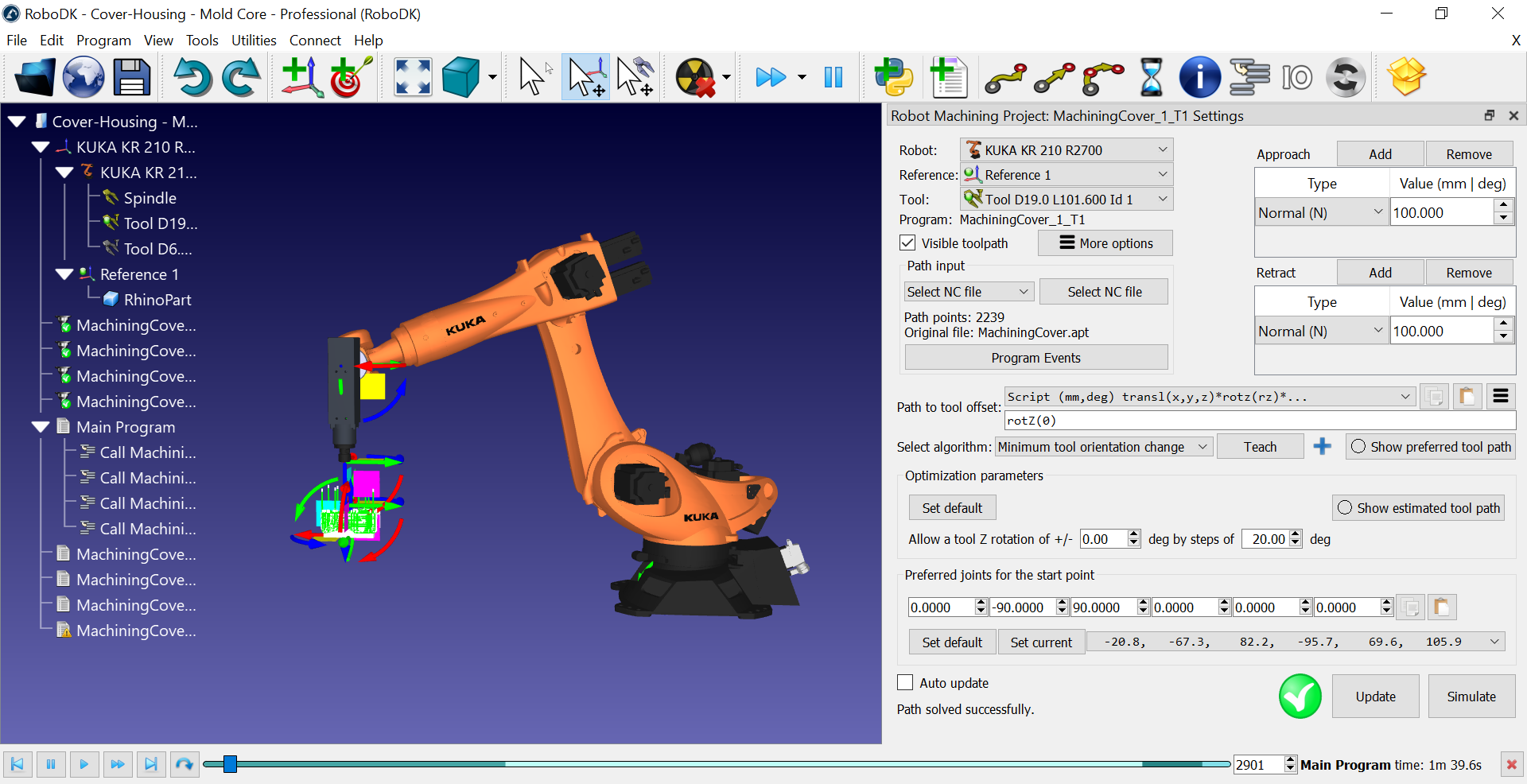
自定义刀具方向
大多数加工或制造操作都需要5轴约束。虽然工具 (TCP) 的位置和切割轴已经确定,但在使用 6 轴机器臂时,你仍有一个额外的自由度需要定义。这个自由度允许我们围绕切割轴旋转,并自动避免奇异点和轴限位。
自定义工具方向最简单的方法是点击在机器加工项目中示教按钮,选择:示教即告知RoboDK你希望保持当前刀具方向,系统将自动调整参数以匹配该方向。
通过选择:显示优选刀具路径,我们可以预览机器人试图遵循的刀具方向。
Tip:按住Alt 键并抓住机器人工具,即可更换刀具方向。
你可以选择:更新和 模拟,查看结果。
Tip:右击机器人,选择:对齐工具方向,即可将工具方向与坐标系对齐。
优化参数允许机器人在无法实现首选方向时自动更换刀具方向。如果工件较大、在奇点附近或接近机器人工作空间的极限时,该参数非常重要。如果看到红色标记,则表示机器人无法执行操作。
如果选择:显示预估工具路径,则可以看到绿色的可到达位置。它将为你提供方向Tip,使路径可行。这意味着我们正在利用额外的自由度来自动避免机器人奇异点和轴限制。
Tip:完成单个机器人加工工序的参数设置后,你可以右键点击该工序,在更多选项里选择:复制设置,然后批量选中其余工序并选择:粘贴设置。最后点击:更新按钮即可重新计算所有机器人加工程序。
生成机器人程序
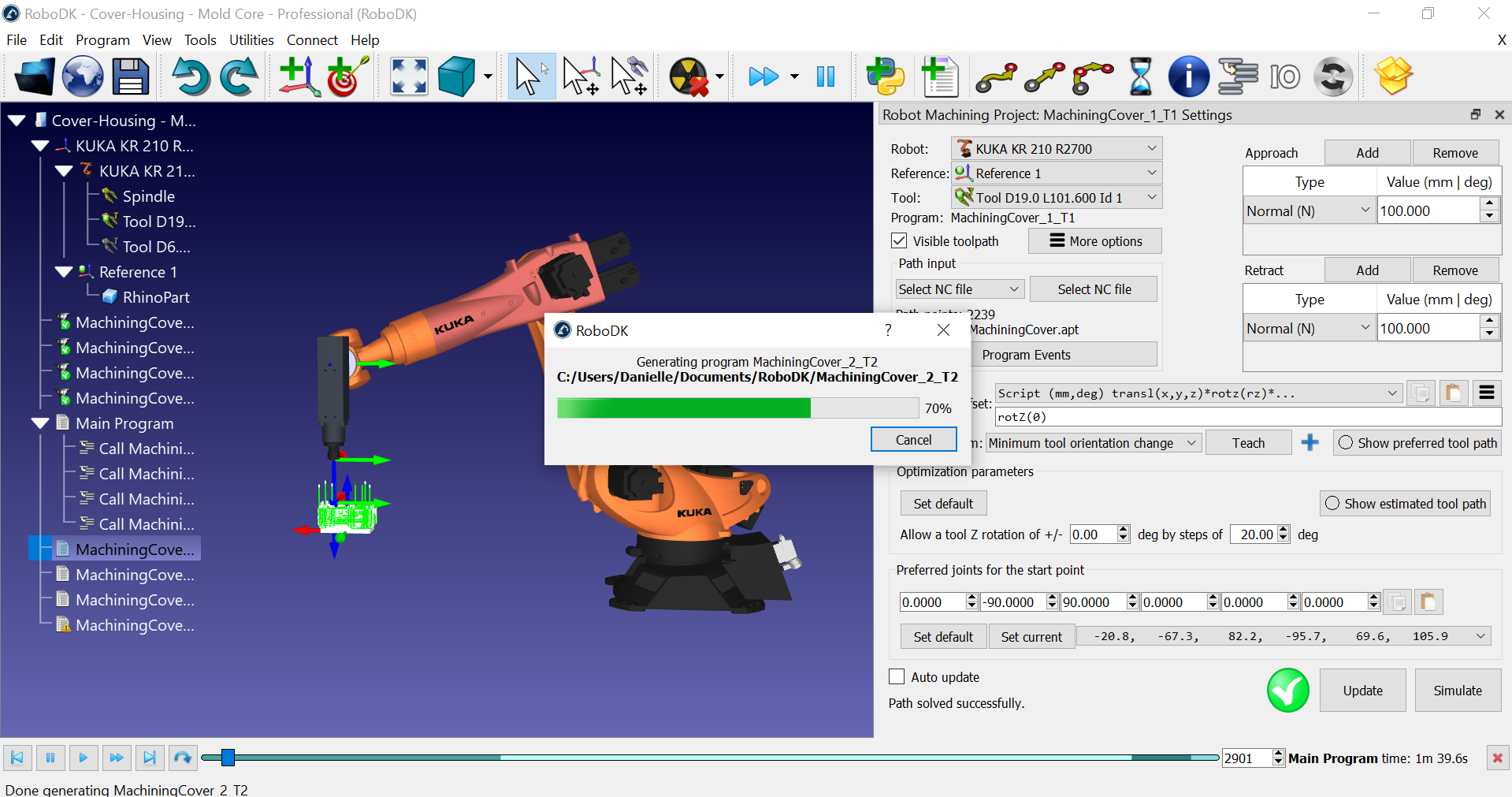
你可以通过右键单击一个或多个程序,然后选择选项:生成机器人程序,来为你的机器人控制器创建或更新机器人程序(文件)。
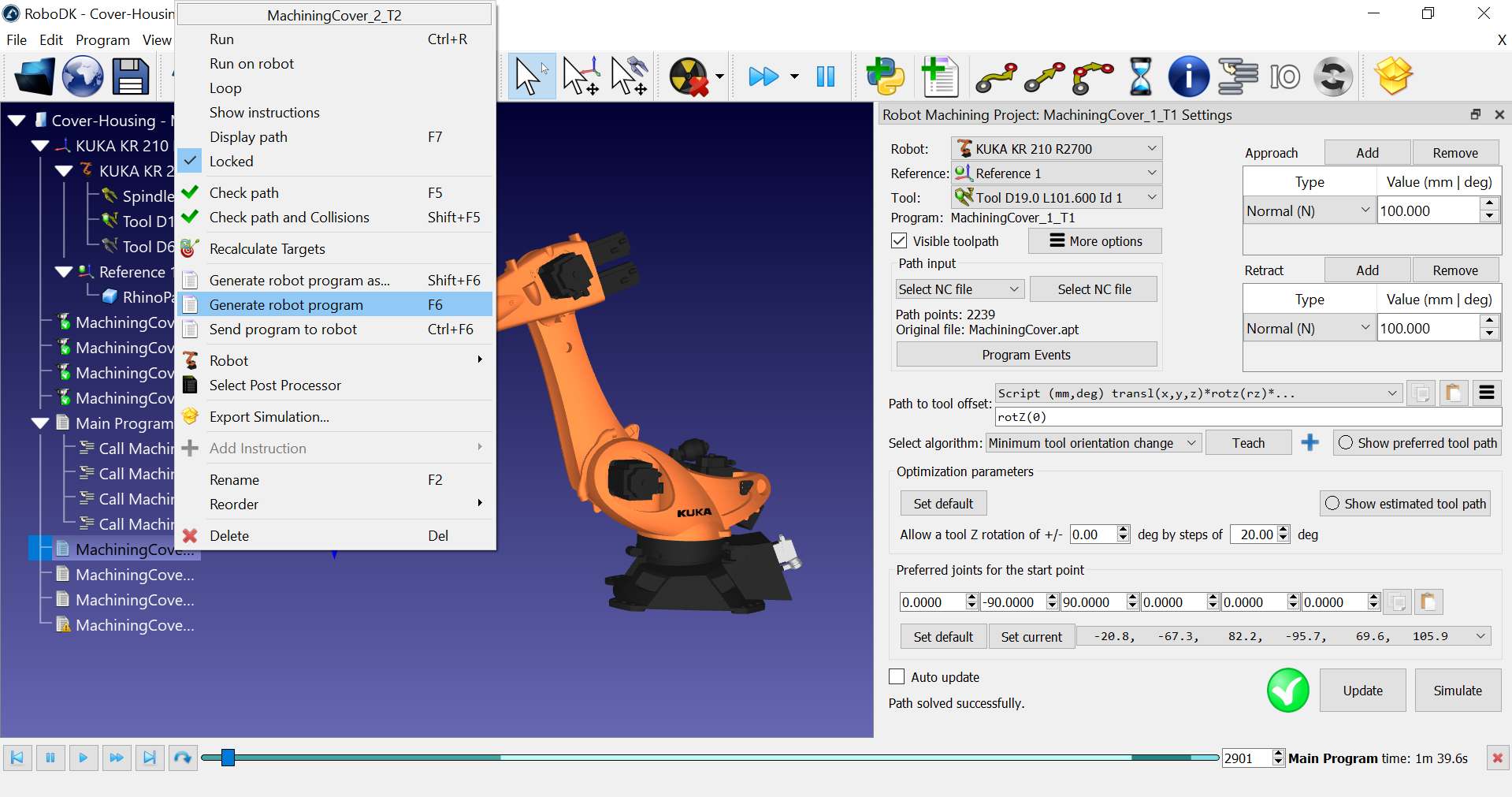
Tip:在生成机器人程序文件之前,你可以双击:主程序,快速预览仿真结果,确保没有问题。
在本例中,如果我们使用的是库卡(Kuka)的 KRC 机器人控制器,我们将获取 SRC 程序文件。
你应当确保程序中定义的参考坐标系与刀具设置与在RoboDK中的定义完全一致。
你还可以使用编号的参考坐标系和刀具名称,通过其ID调用控制器中存储的参数值。
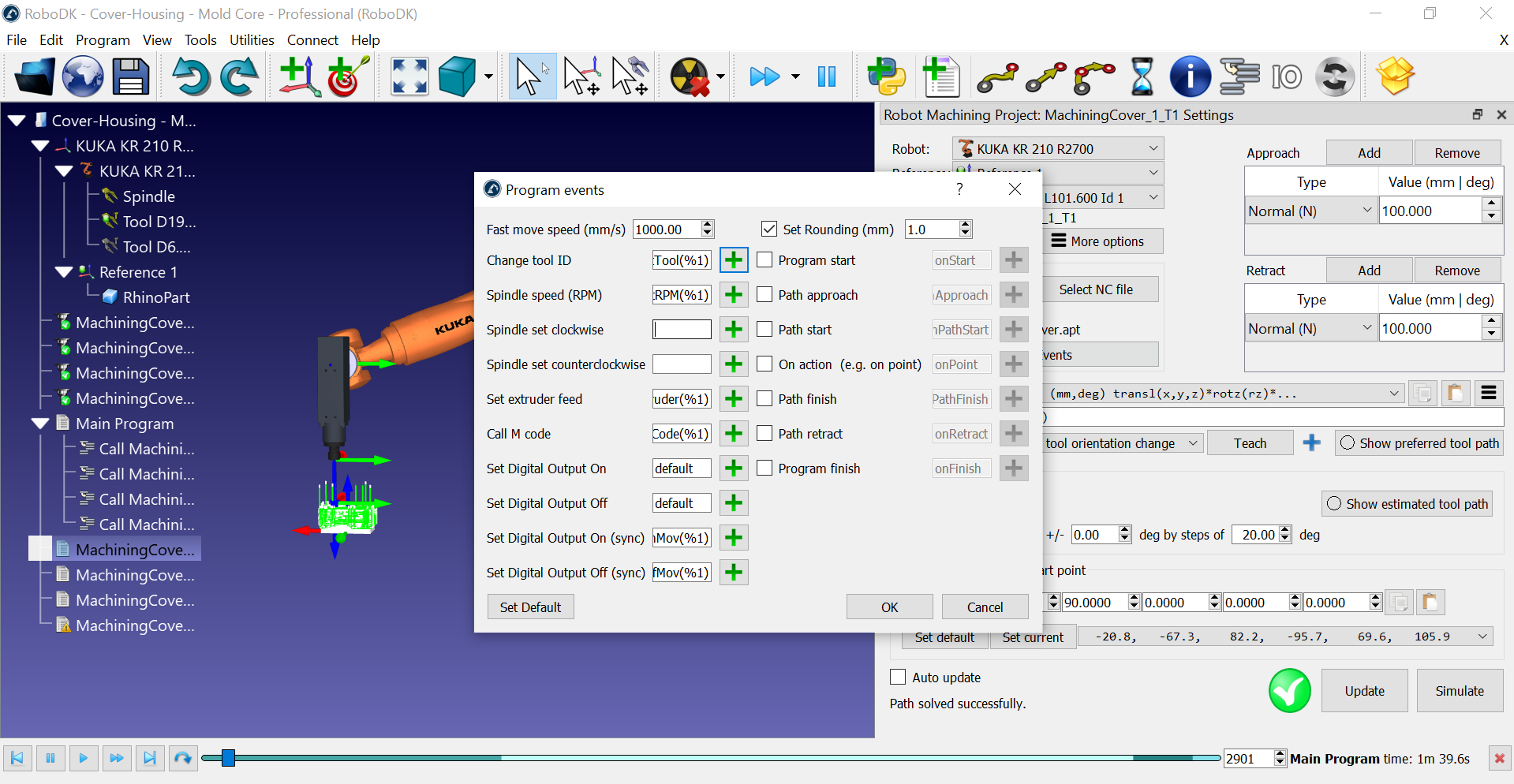
程序中可自定义调用指令,根据刀具ID自动选择对应刀具并激活主轴。这些设置可在程序事件菜单中进行定制。当需要执行特定加工指令(如更换刀具、调整主轴转速或运行M代码)时,可触发机器人控制器中的特殊程序流程。
更换后处理器
每台机器人都有与之关联的默认后置处理器,可生成适用于你机器人控制器的有效代码。根据所使用的机器人控制器类型,你可以轻松更改程序输出格式。
请按照以下步骤更改后处理器:
1.右键点击程序或机器人。
2.选择:选择后处理程序。
该设置将应用于使用同一机器人的所有程序。
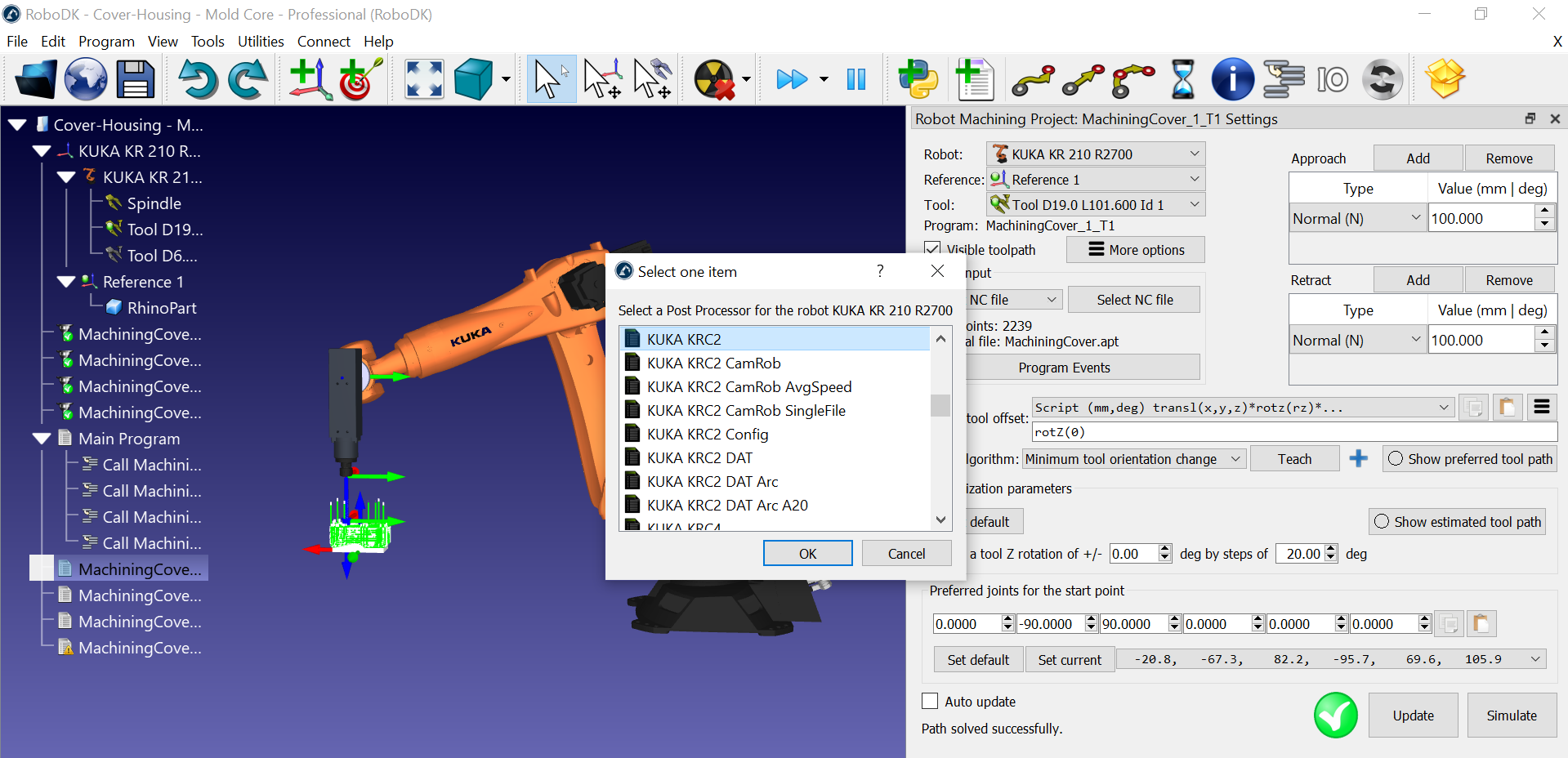
Note:RoboDK内置80余种后置处理器,支持50多家机器人制造商。
若你使用KUKA机器人,默认应显示选中的KUKA KRC2后置处理器,该处理器同样兼容KUKA KRC4控制器。当然,若你使用的是KRC4控制器,仍可选择专门的KUKA KRC4后置处理器。