生成机器人程序
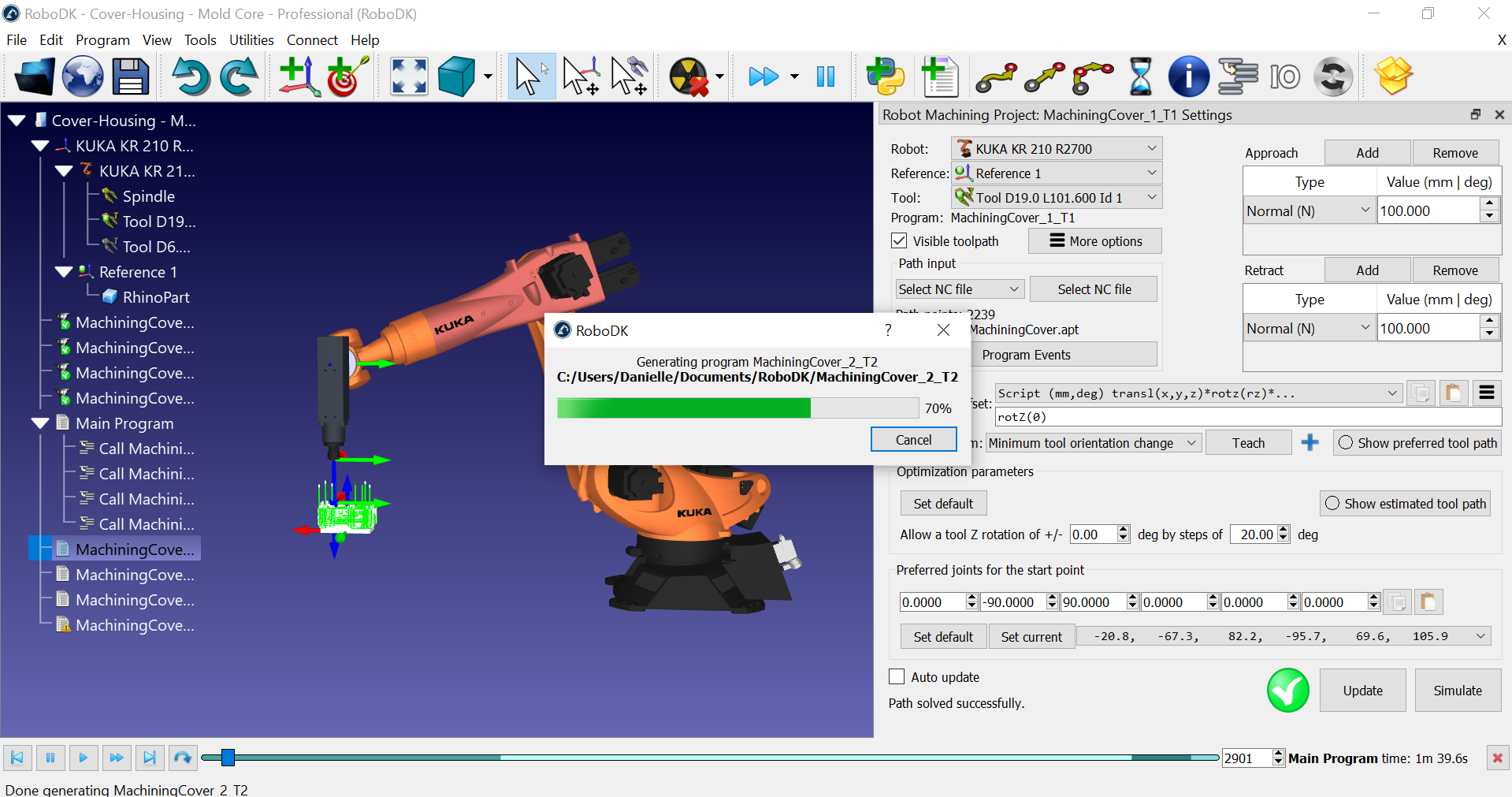
你可以通过右键单击一个或多个程序,然后选择选项:生成机器人程序,来为你的机器人控制器创建或更新机器人程序(文件)。
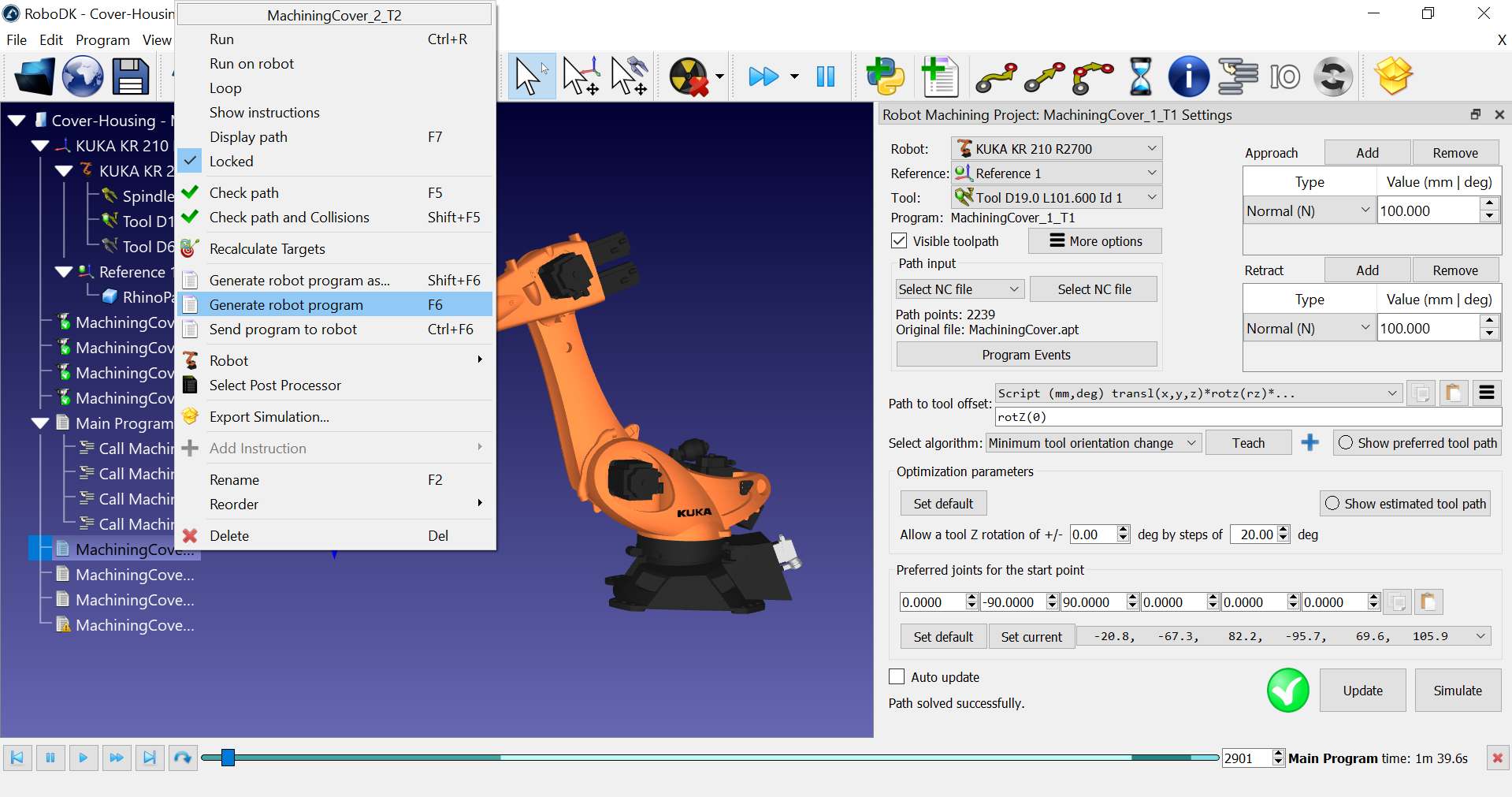
Tip:在生成机器人程序文件之前,你可以双击:主程序,快速预览仿真结果,确保没有问题。
在本例中,如果我们使用的是库卡(Kuka)的 KRC 机器人控制器,我们将获取 SRC 程序文件。
你应当确保程序中定义的参考坐标系与刀具设置与在RoboDK中的定义完全一致。
你还可以使用编号的参考坐标系和刀具名称,通过其ID调用控制器中存储的参数值。
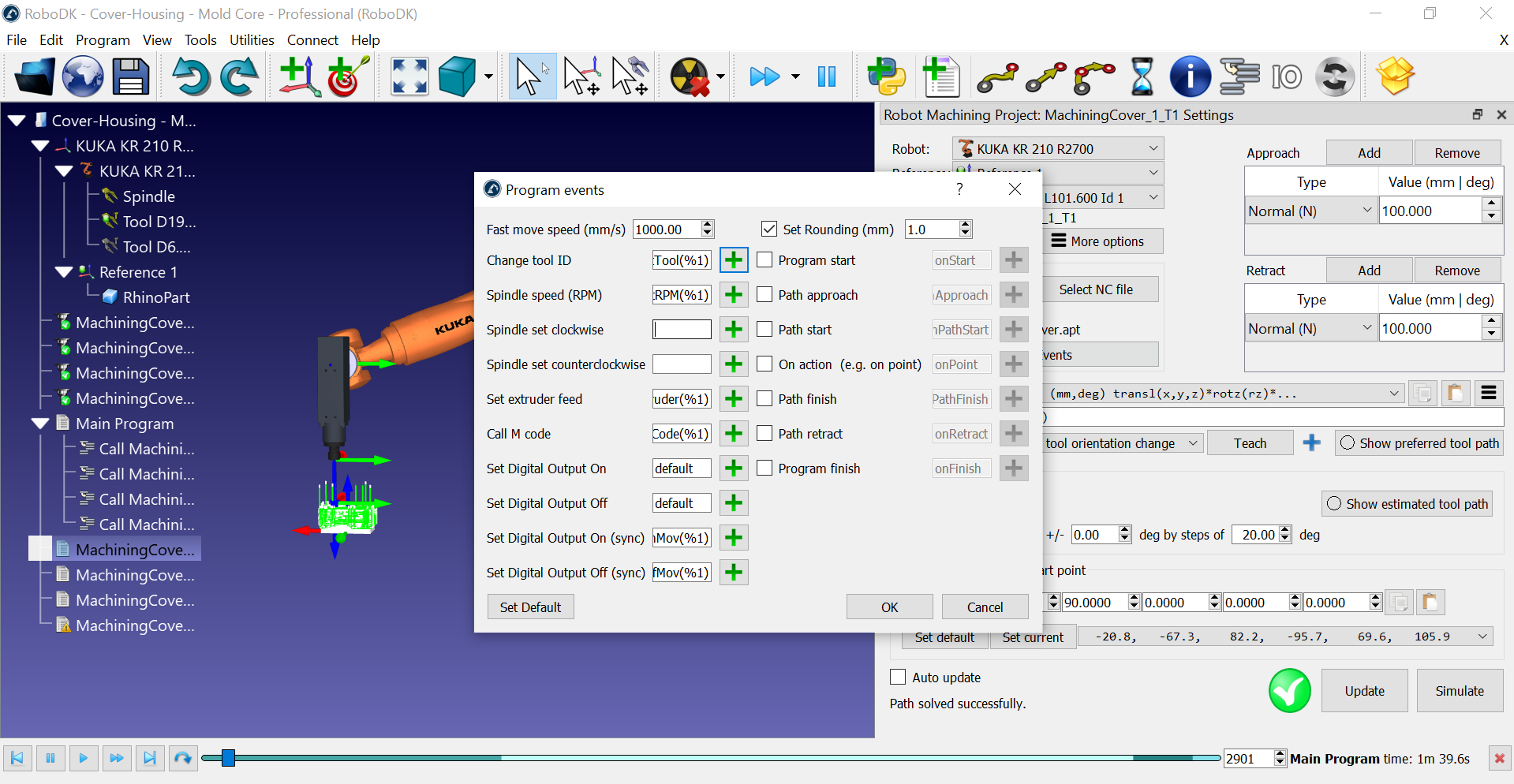
程序中可自定义调用指令,根据刀具ID自动选择对应刀具并激活主轴。这些设置可在程序事件菜单中进行定制。当需要执行特定加工指令(如更换刀具、调整主轴转速或运行M代码)时,可触发机器人控制器中的特殊程序流程。