自定义刀具方向
大多数加工或制造操作都需要5轴约束。虽然工具 (TCP) 的位置和切割轴已经确定,但在使用 6 轴机器臂时,你仍有一个额外的自由度需要定义。这个自由度允许我们围绕切割轴旋转,并自动避免奇异点和轴限位。
自定义工具方向最简单的方法是点击在机器加工项目中示教按钮,选择:示教即告知RoboDK你希望保持当前刀具方向,系统将自动调整参数以匹配该方向。
通过选择:显示优选刀具路径,我们可以预览机器人试图遵循的刀具方向。
Tip:按住Alt 键并抓住机器人工具,即可更换刀具方向。
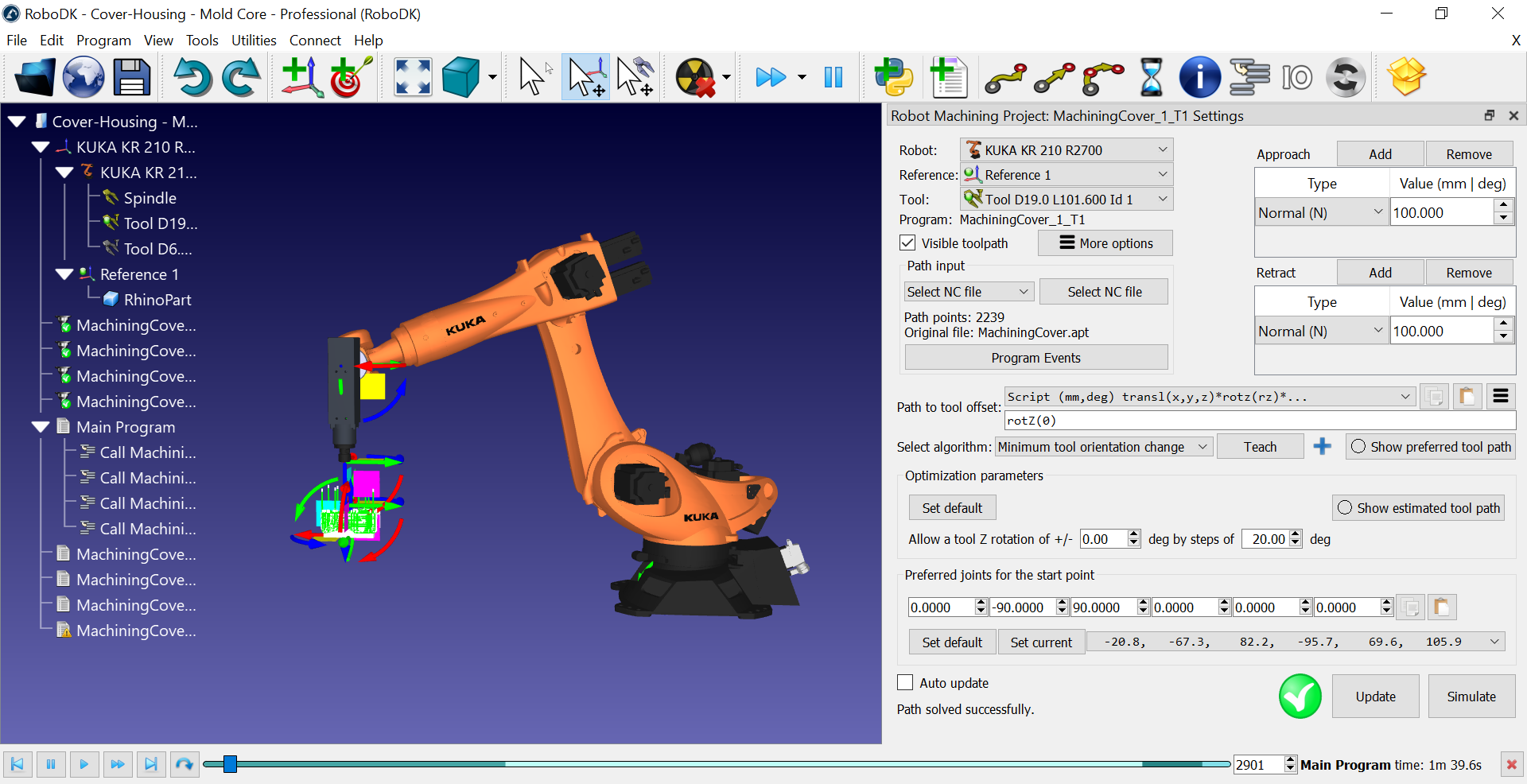
你可以选择:更新和 模拟,查看结果。
Tip:右击机器人,选择:对齐工具方向,即可将工具方向与坐标系对齐。
优化参数允许机器人在无法实现首选方向时自动更换刀具方向。如果工件较大、在奇点附近或接近机器人工作空间的极限时,该参数非常重要。如果看到红色标记,则表示机器人无法执行操作。
如果选择:显示预估工具路径,则可以看到绿色的可到达位置。它将为你提供方向Tip,使路径可行。这意味着我们正在利用额外的自由度来自动避免机器人奇异点和轴限制。
Tip:完成单个机器人加工工序的参数设置后,你可以右键点击该工序,在更多选项里选择:复制设置,然后批量选中其余工序并选择:粘贴设置。最后点击:更新按钮即可重新计算所有机器人加工程序。