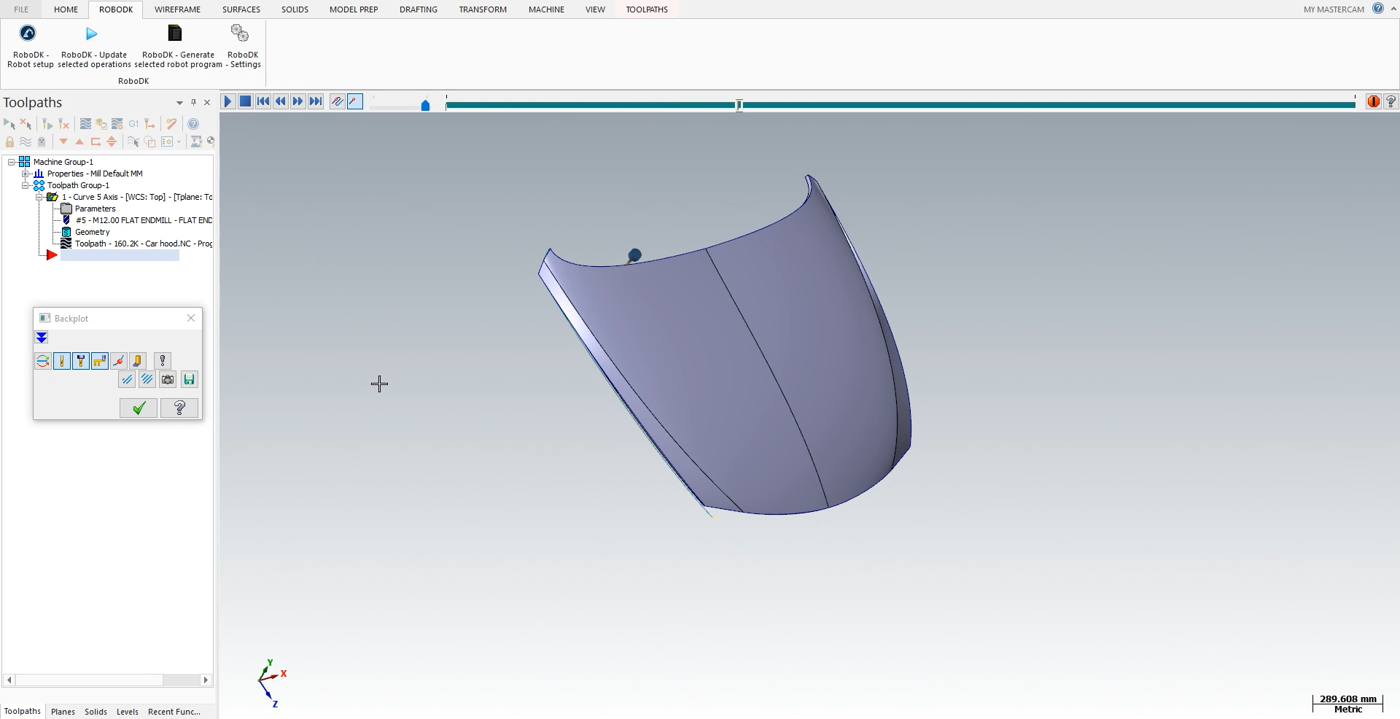
Mastercam
在Mastercam中打开3D模型并启动切割模拟。可见软件已根据切割曲面自动调整刀具方向。
按以下步骤将部件导入RoboDK:
1.选择 RoboDK 选项卡,然后选择RoboDK - Robot setup。
2.选择Load Part。
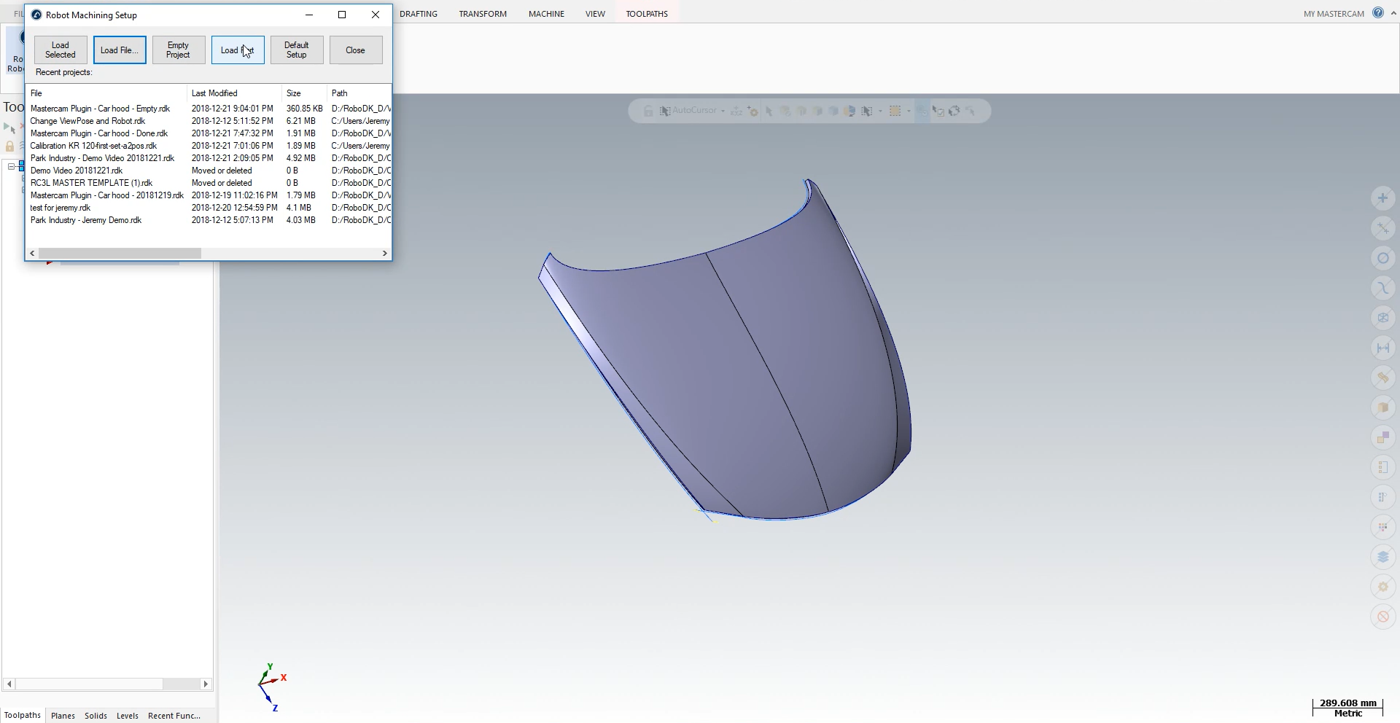
此时部件应显示在RoboDK工作站夹具的加工基准坐标系上。
Note:为确保部件导入位置准确,需预先设置Machining Reference。右键点击Machining Reference➔ Visible,在Mastercam创建部件时需将原点定位于此位置。导入时RoboDK会自动将部件原点与加工基准坐标系原点对齐。
下一步是将切割路径从 Mastercam 导入 RoboDK。
1.在 Mastercam 中选择RoboDK 选项卡。
2.选择RoboDK - Update selected operations。
3.返回RoboDK。