RoboDK
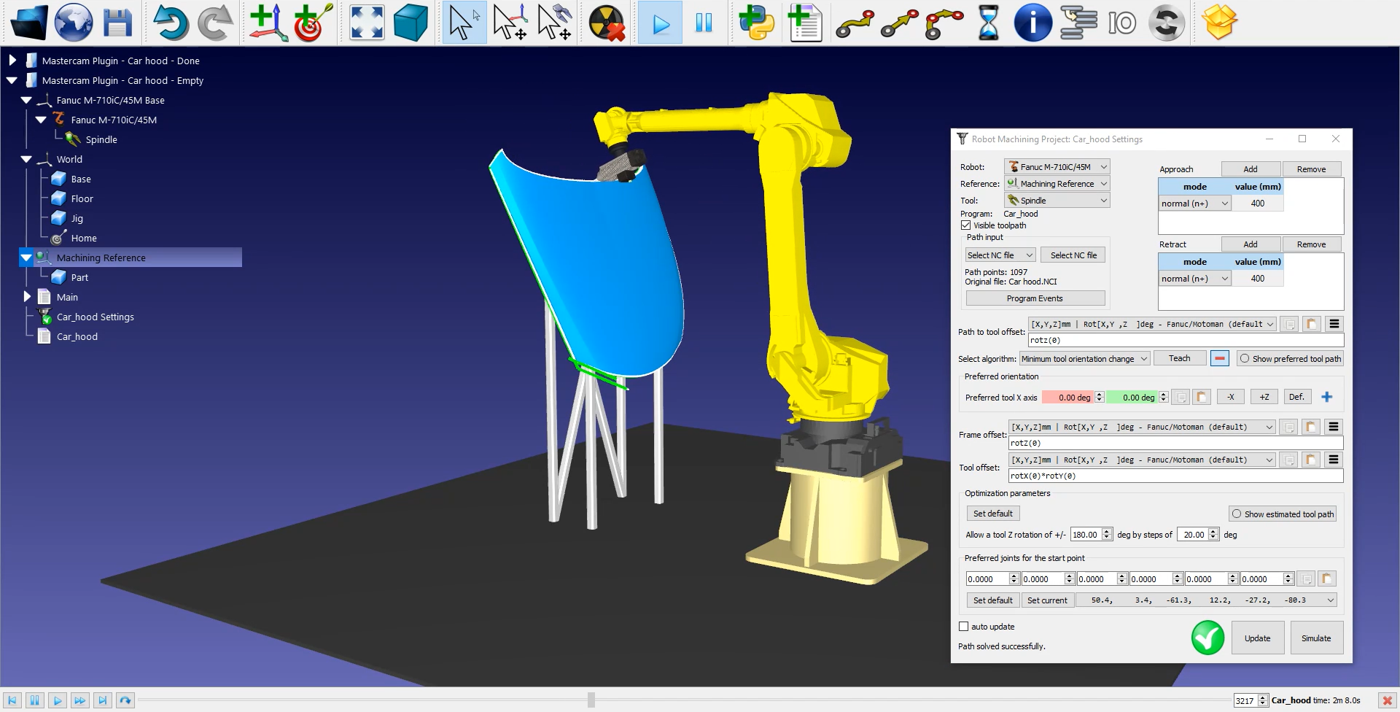
在 RoboDK 中导入机器人切割路径后,你应该会看到切割刀具路径附加到 RoboDK 工作站的模具参考上。在
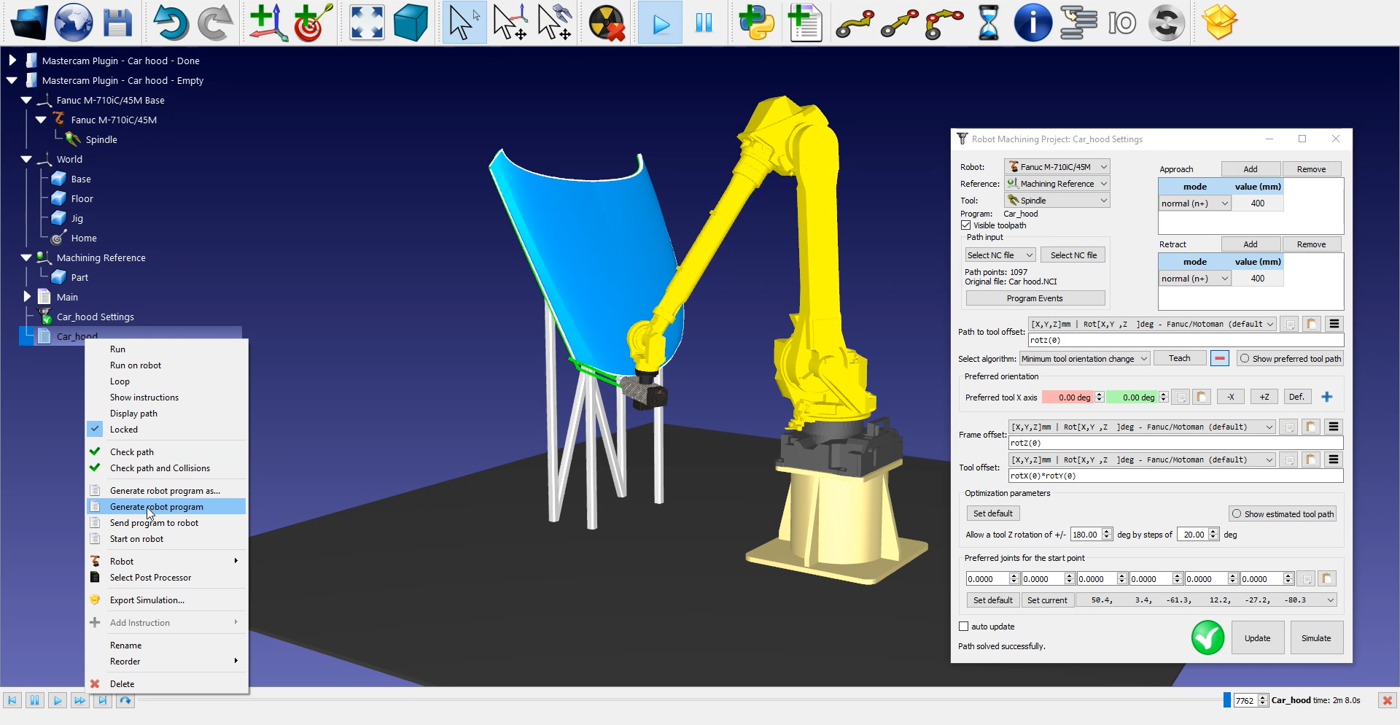
你还可以调整切割路径前后的接近和缩回运动值。本例中,400 毫米的接近/缩回应该是安全的。现在这些运动比默认的接近/缩回运动长 4 倍,有助于避免与工件发生任何碰撞。
你还可以在菜单下部调整部件的方向。
下一步是通过选择
Note:在 RoboDK 中,按住空格键或使用菜单中的
Note:你还可以使用程序事件按钮来激活或停用 I/O,例如主轴的旋转。
要生成机器人程序,请确保使用正确的后处理器。双击
最后,右击
现在发那科(Fanuc)LS 和/或 TP 文件现在可以传输到机器人控制器。