Robot Cutting
简介
本案例将展示如何通过Mastercam插件使用RoboDK实现五轴机器人加工。该案例使用搭载主轴切割工具的发那科机器人,对汽车引擎盖周边多余材料进行修边处理。
Video:使用Mastercam进行五轴切割应用的机器人编程https://youtu.be/wdpQ76OGS5I。
通过RoboDK的Mastercam插件,你可以直接将Mastercam中的机器人加工项目快速导入RoboDK。该插件支持50多家机器人制造商、500余种机器人型号的编程。
RoboDK的Mastercam插件支持NCI格式(Mastercam原生预处理文件)以及标准APT CLS和G代码文件。若已购买RoboDK许可证,该插件可免费使用。
Tip: 更多关于Mastercam插件的功能,请参阅Mastercam的RoboDK插件章节。
机器人切割(5 轴)
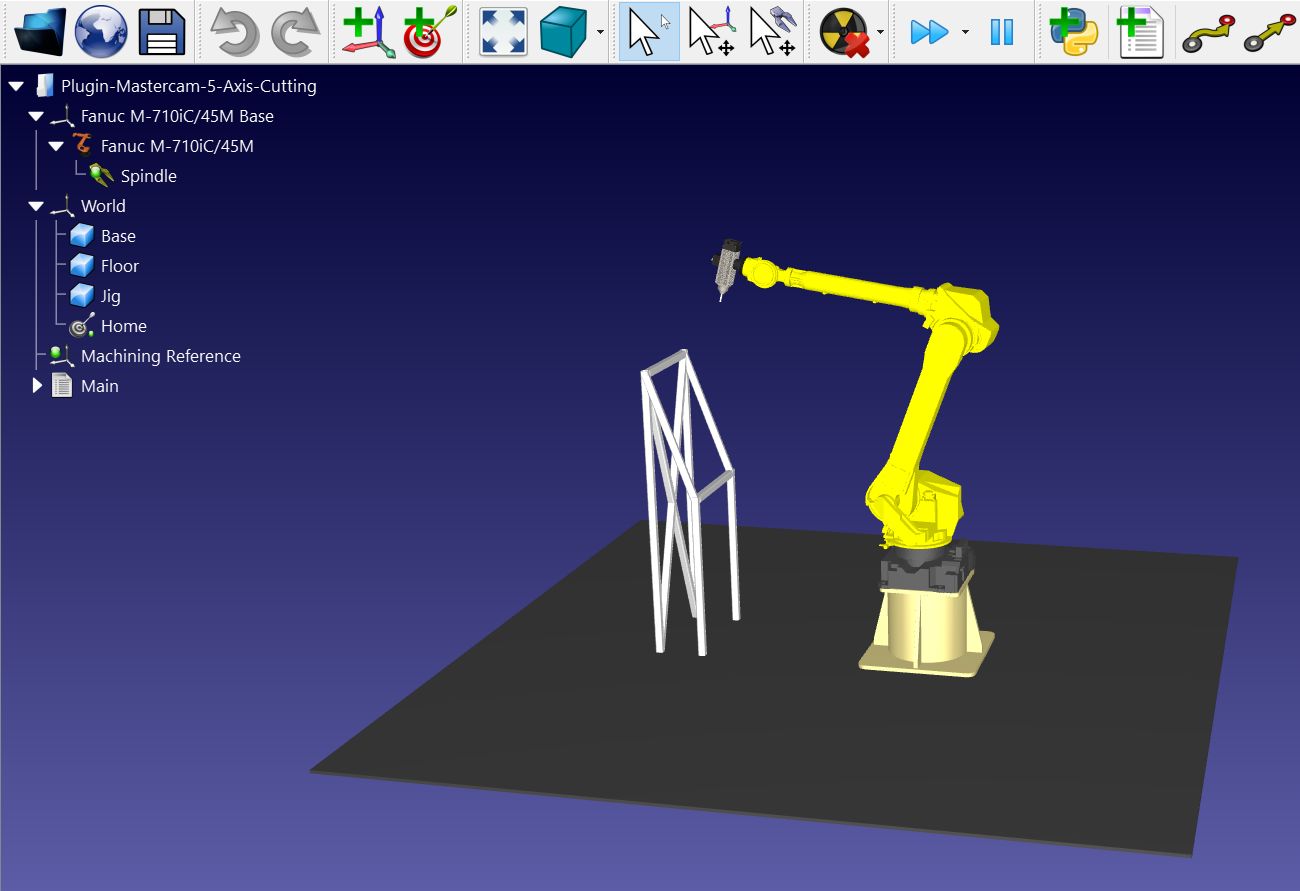
启动项目时,建议从默认库中选择RoboDK的五轴切割案例。
设置工作站
本案例采用发那科M-710iC/45M机器人,配置主轴切割工具及汽车引擎盖专用夹具。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
加载示例:
1.选择:文件 ➔
2.从RoboDK 的示例部分找到5 轴切割示例:
C:/RoboDK/Examples/ Plugin-Mastercam-5-Axis-Cutting.rdk.
加载工作站后,打开Mastercam并载入项目C:/RoboDK/Other/Plugin-Mastercam/Examples/Car hood.mcam。
Mastercam的切割路径规划
在Mastercam中打开3D模型并启动切割模拟。可见软件已根据切割曲面自动调整刀具方向。
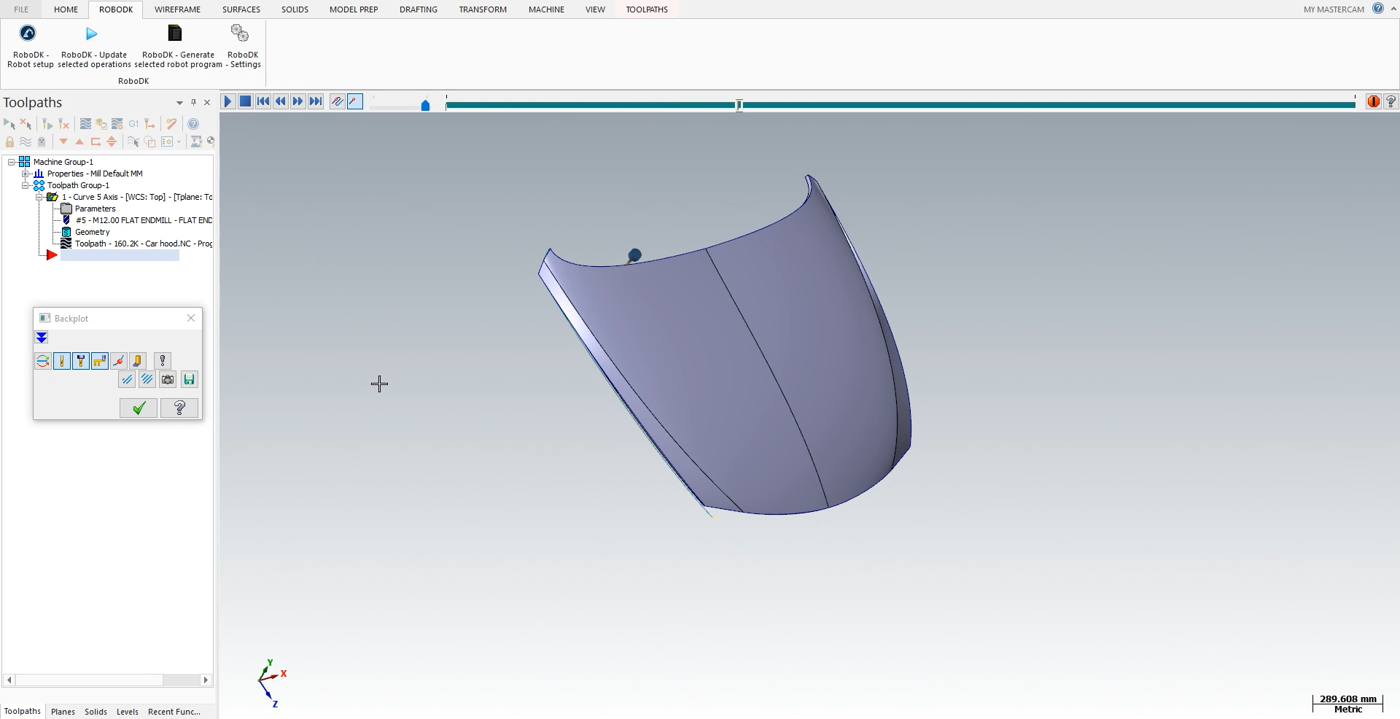
按以下步骤将部件导入RoboDK:
1.选择 RoboDK 选项卡,然后选择RoboDK - Robot setup。
2.选择Load Part。
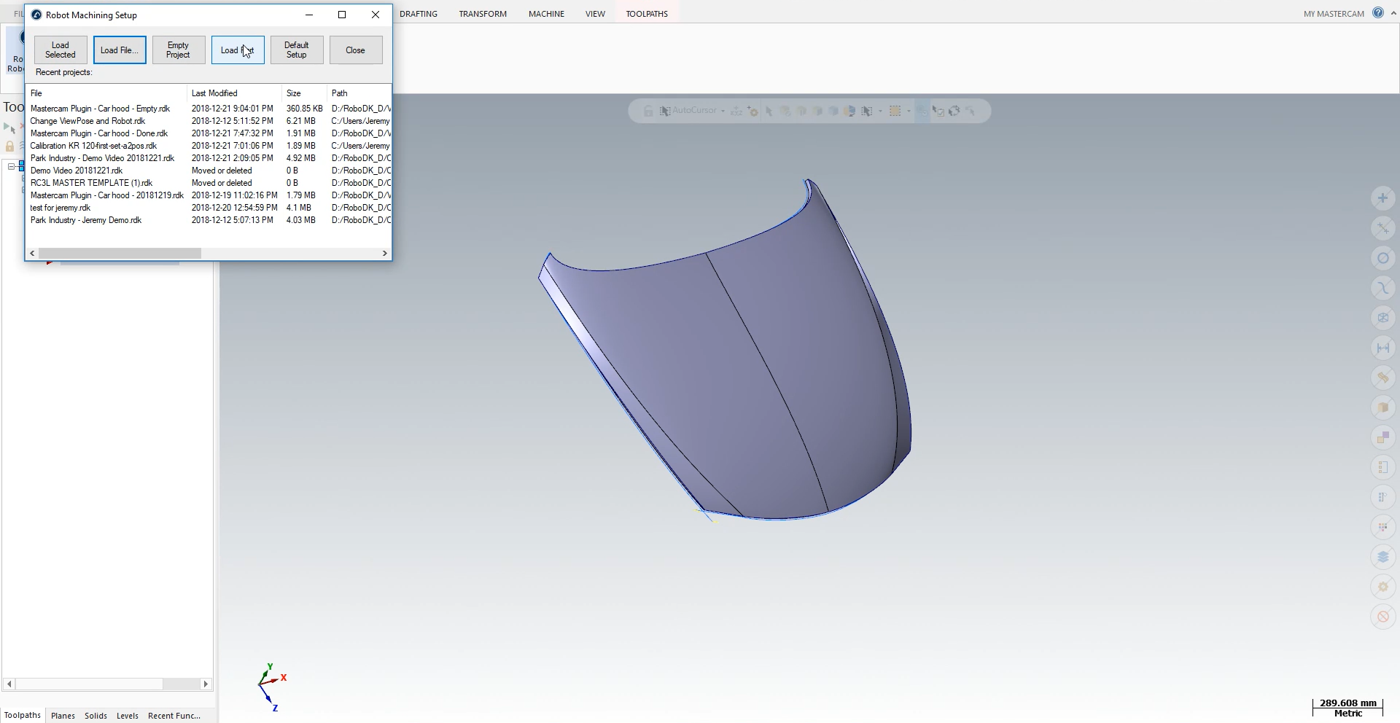
此时部件应显示在RoboDK工作站夹具的加工基准坐标系上。
Note:为确保部件导入位置准确,需预先设置Machining Reference。右键点击Machining Reference➔ Visible,在Mastercam创建部件时需将原点定位于此位置。导入时RoboDK会自动将部件原点与加工基准坐标系原点对齐。
下一步是将切割路径从 Mastercam 导入 RoboDK。
1.在 Mastercam 中选择RoboDK 选项卡。
2.选择RoboDK - Update selected operations。
3.返回RoboDK。
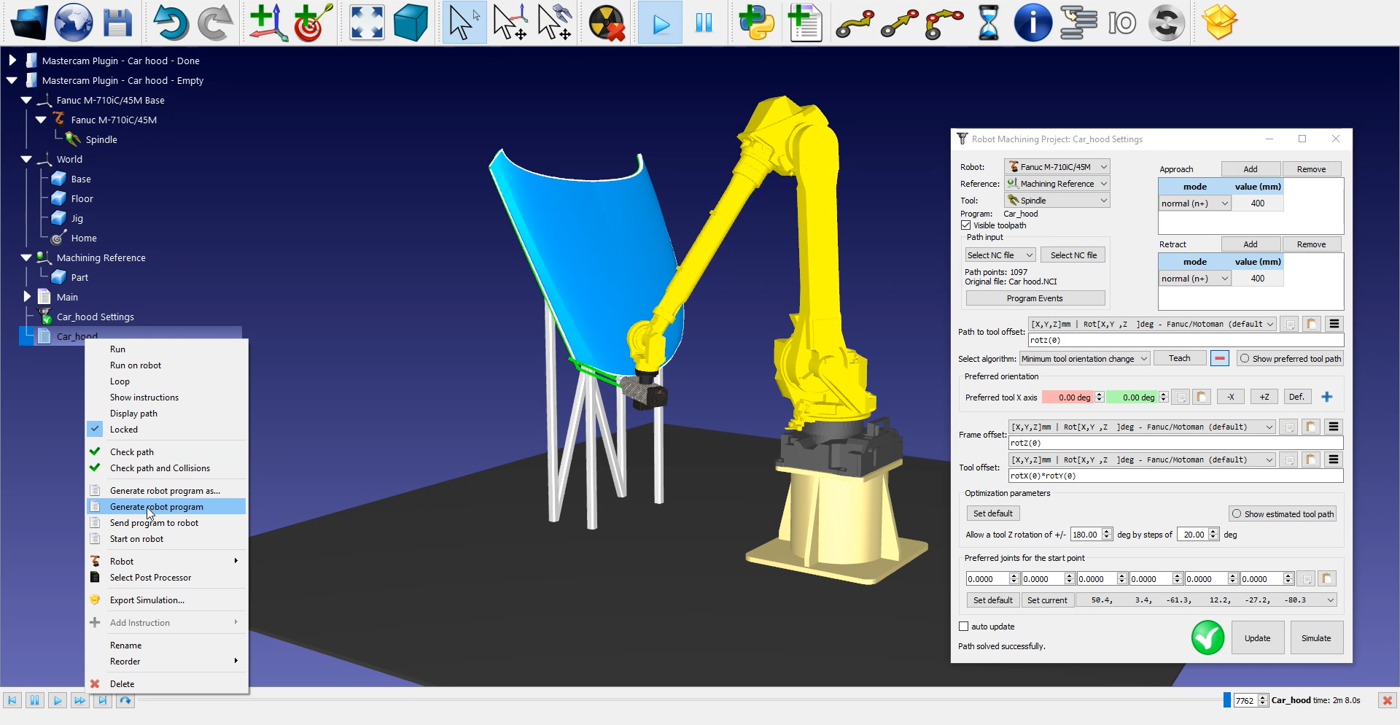
RoboDK的机器人切割
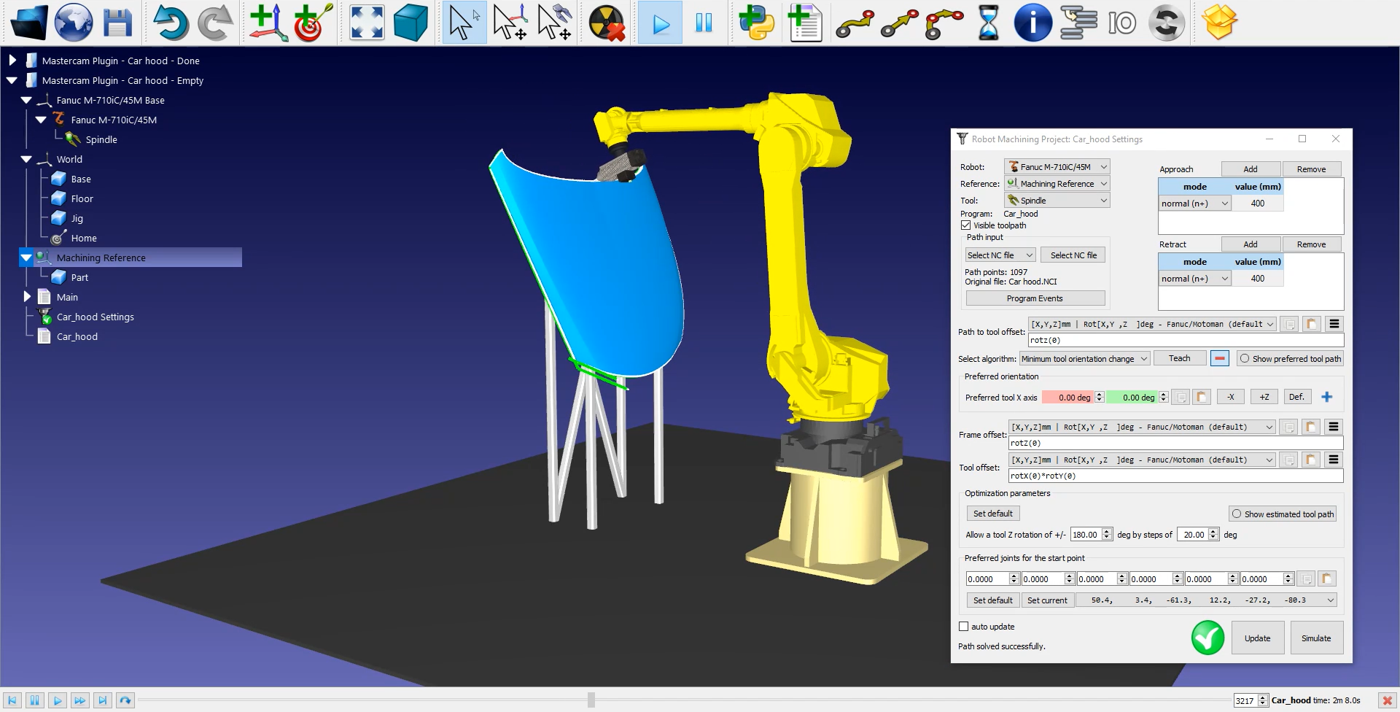
在 RoboDK 中导入机器人切割路径后,你应该会看到切割刀具路径附加到 RoboDK 工作站的模具参考上。在
你还可以调整切割路径前后的接近和缩回运动值。本例中,400 毫米的接近/缩回应该是安全的。现在这些运动比默认的接近/缩回运动长 4 倍,有助于避免与工件发生任何碰撞。
你还可以在菜单下部调整部件的方向。
下一步是通过选择
Note:在 RoboDK 中,按住空格键或使用菜单中的
Note:你还可以使用程序事件按钮来激活或停用 I/O,例如主轴的旋转。
要生成机器人程序,请确保使用正确的后处理器。双击
最后,右击
现在发那科(Fanuc)LS 和/或 TP 文件现在可以传输到机器人控制器。