创建机器人加工坐标系
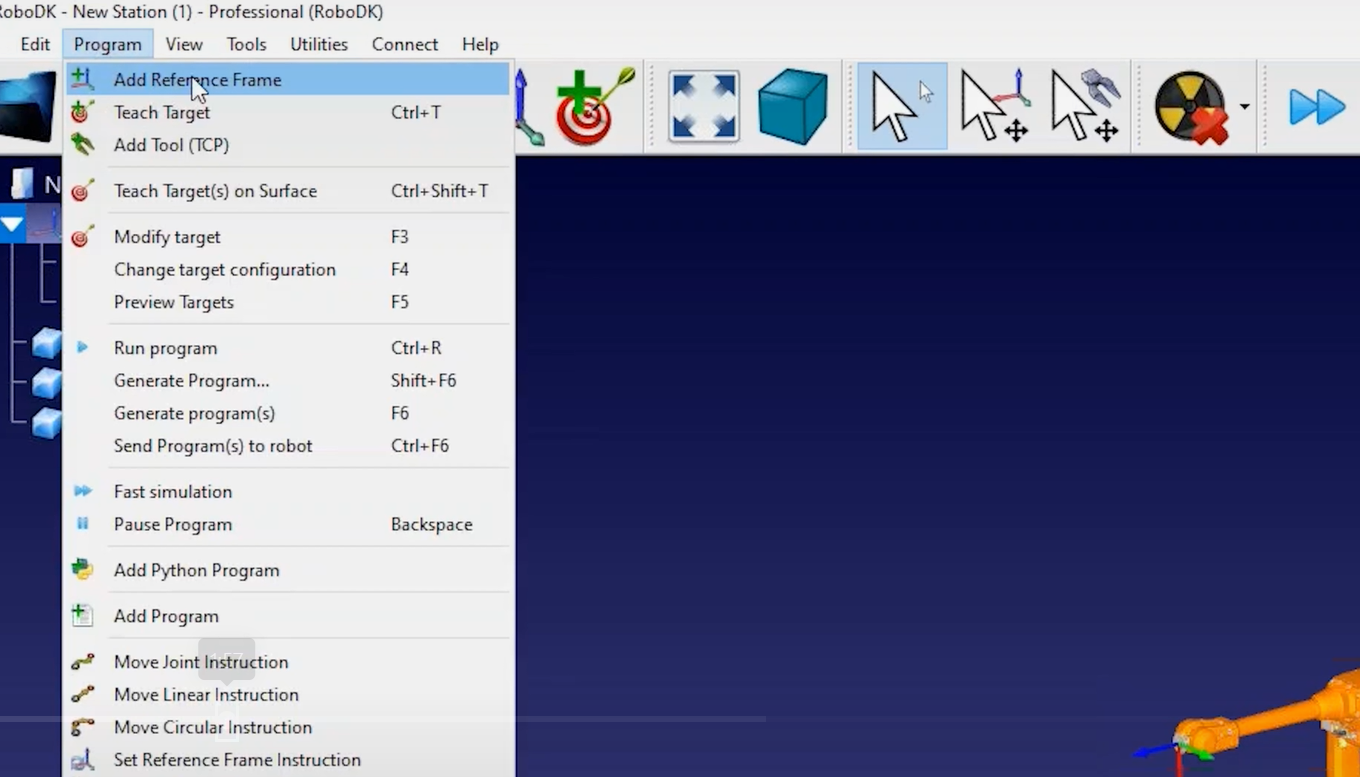
您可以为机器人加工夹具创建一个新的坐标系,在菜单栏选择:程序→添加参考坐标系,可为加工夹具创建新坐标系。
Tip:也可通过工具栏对应按钮添加参考系。
Note:将加载的物体拖放到树状图中新坐标系下可建立关联。
Tip:若加载了刀具3D模型,将其拖放到机器人条目下,RoboDK会自动将其转换为工具。详见入门指南。
Tip:双击工具可调整几何位置参数。
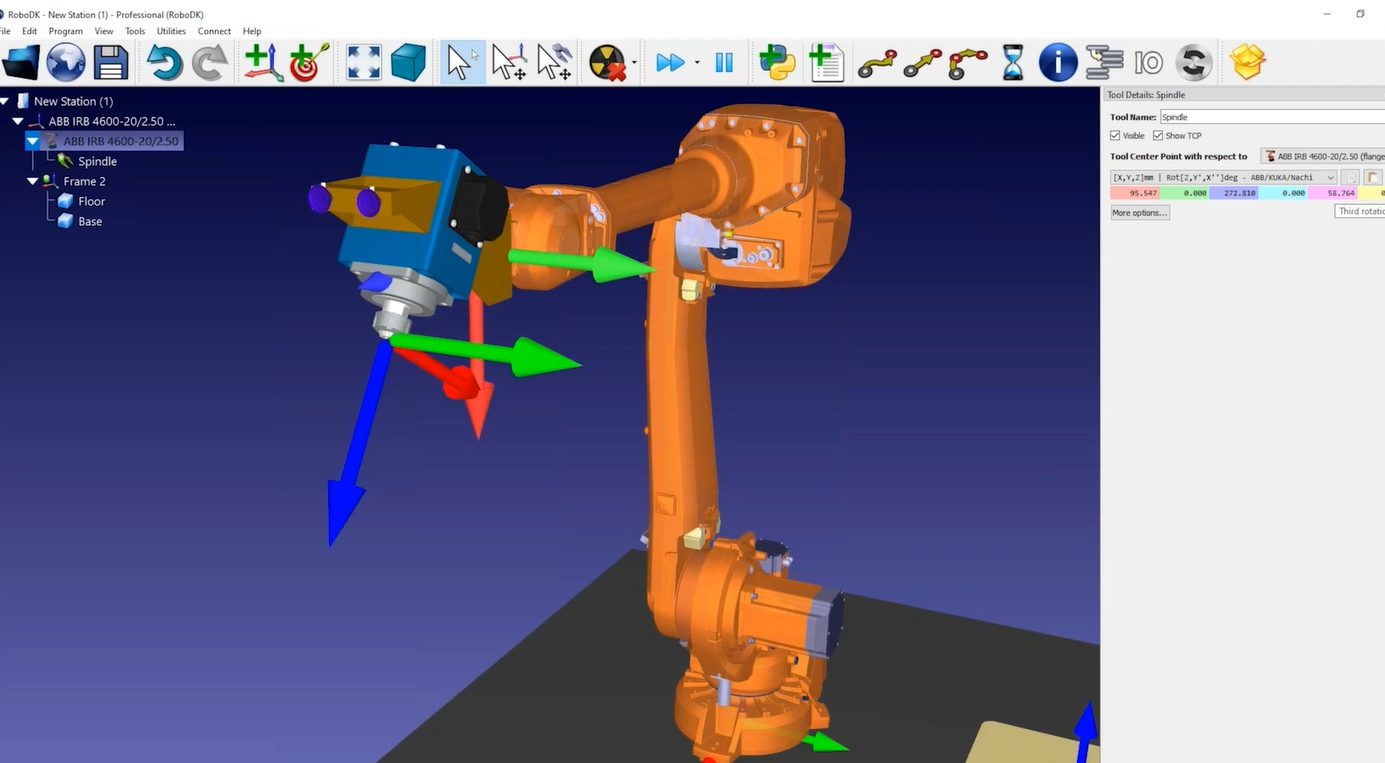
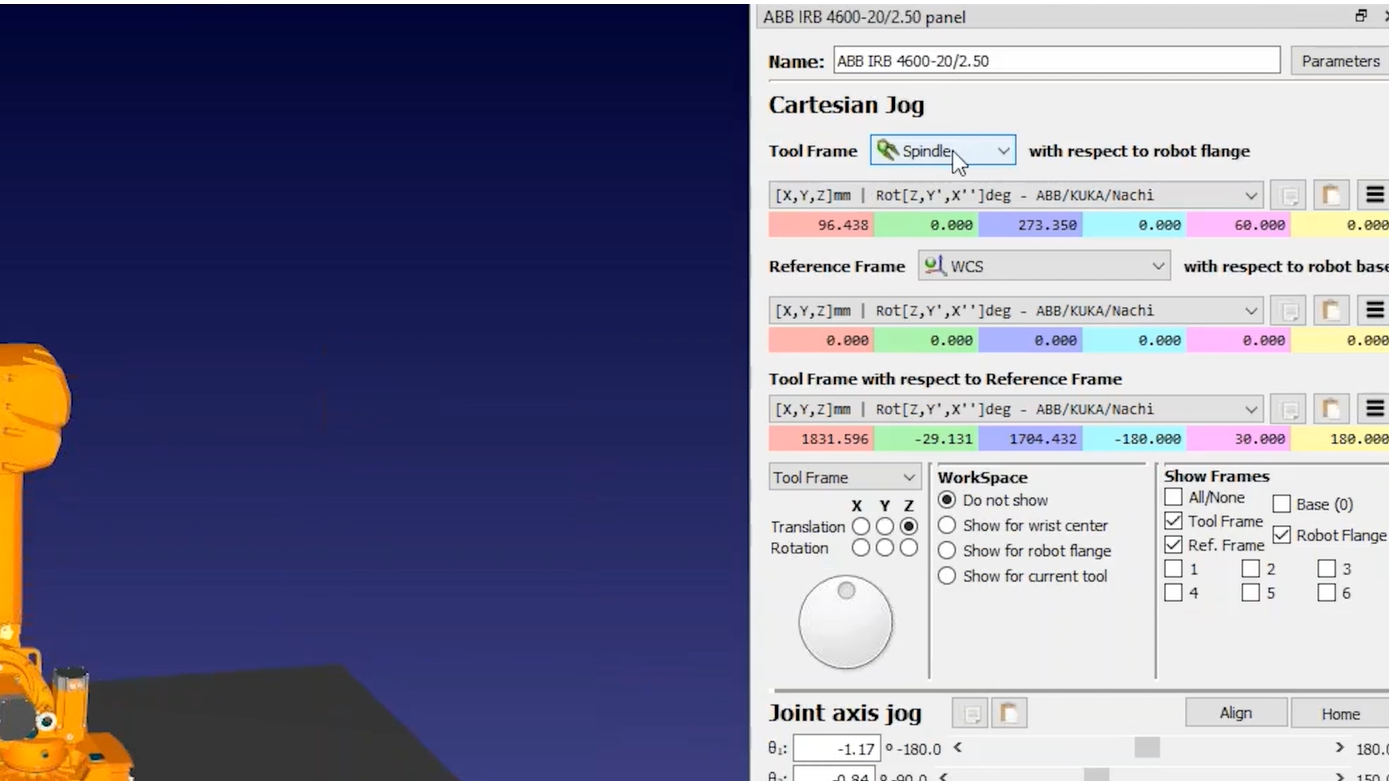
按以下步骤正确定义工具(TCP):
1.输入已知工具坐标(支持多种厂商特定的姿态格式)。
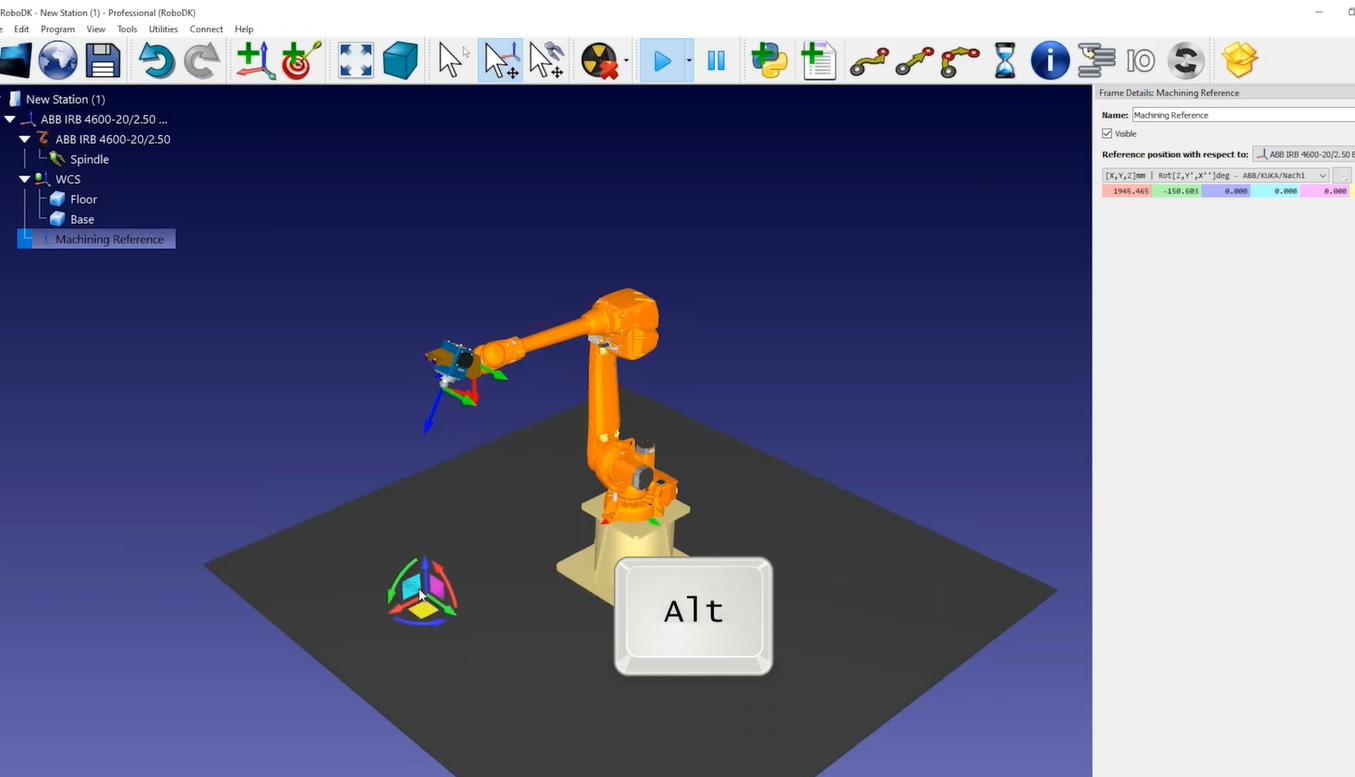
2.按住ALT键可移动机器人或任何坐标系。
3.同时按住ALT+Shift键可调整TCP位置和方向。
Note:坐标系操作同理。若某坐标系代表世界坐标系,可双击将其坐标归零或右键选择"重置"。
创建加工基准坐标系的步骤:
4.选择菜单栏:程序,然后选择:添加参考坐标系。
5.按F2或右键选择"重命名"修改树状图项目名称。
Tip:是否将坐标系关联到机器人底座会影响非原点安装的机器人。输入坐标值时需注意参考基准(通常为机器人底座)。
6.按住ALT键可自由移动坐标系到理想位置。
7.双击机器人可查看当前使用的工具和坐标系。机器人面板显示值应与控制器显示值一致。
保存机器人工作站的步骤:
8.完成构建后选择:文件→保存工作站,将所有设置和3D模型保存为单一RDK文件。
9.在RoboDK中加载加工程序文件,系统会自动为每个加工操作创建项目。
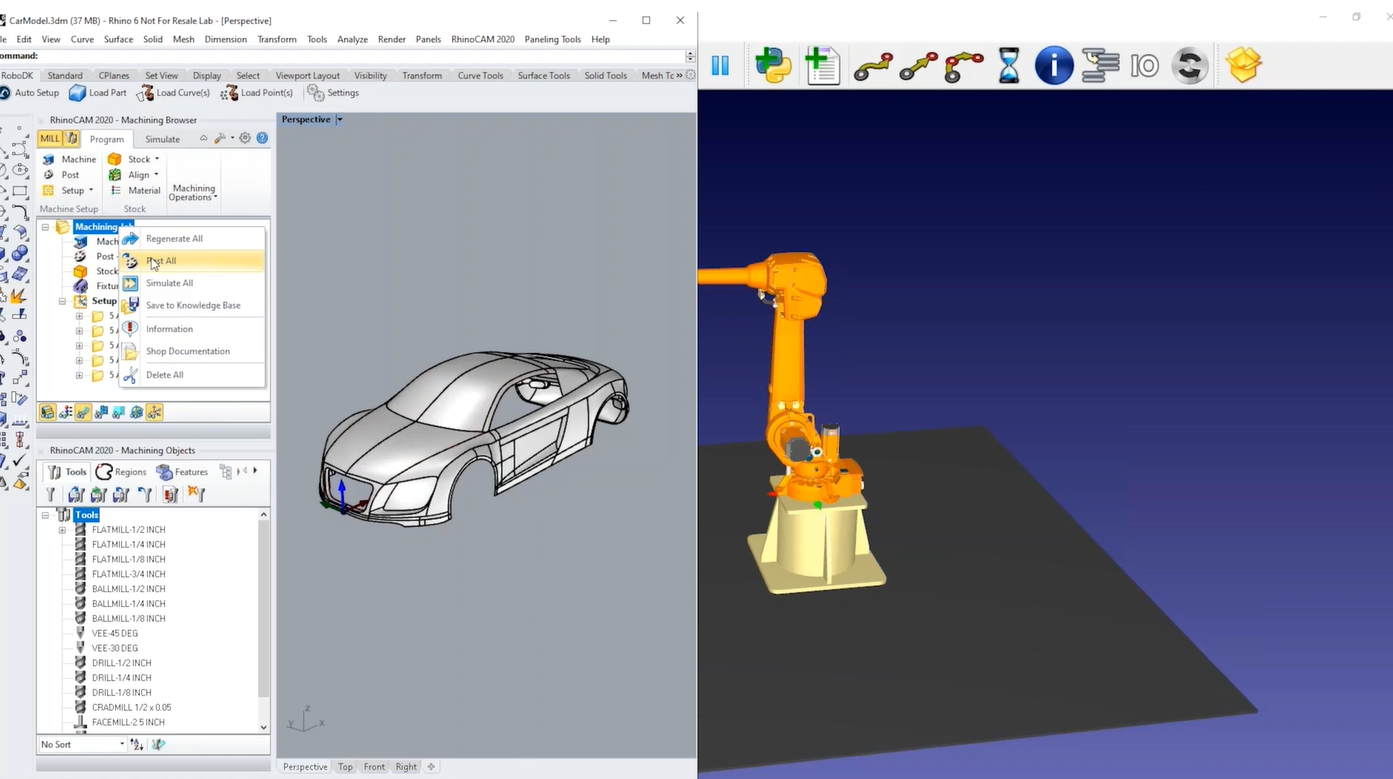
10.点击"更新"检查默认参数下是否可行,也可批量更新所有操作。
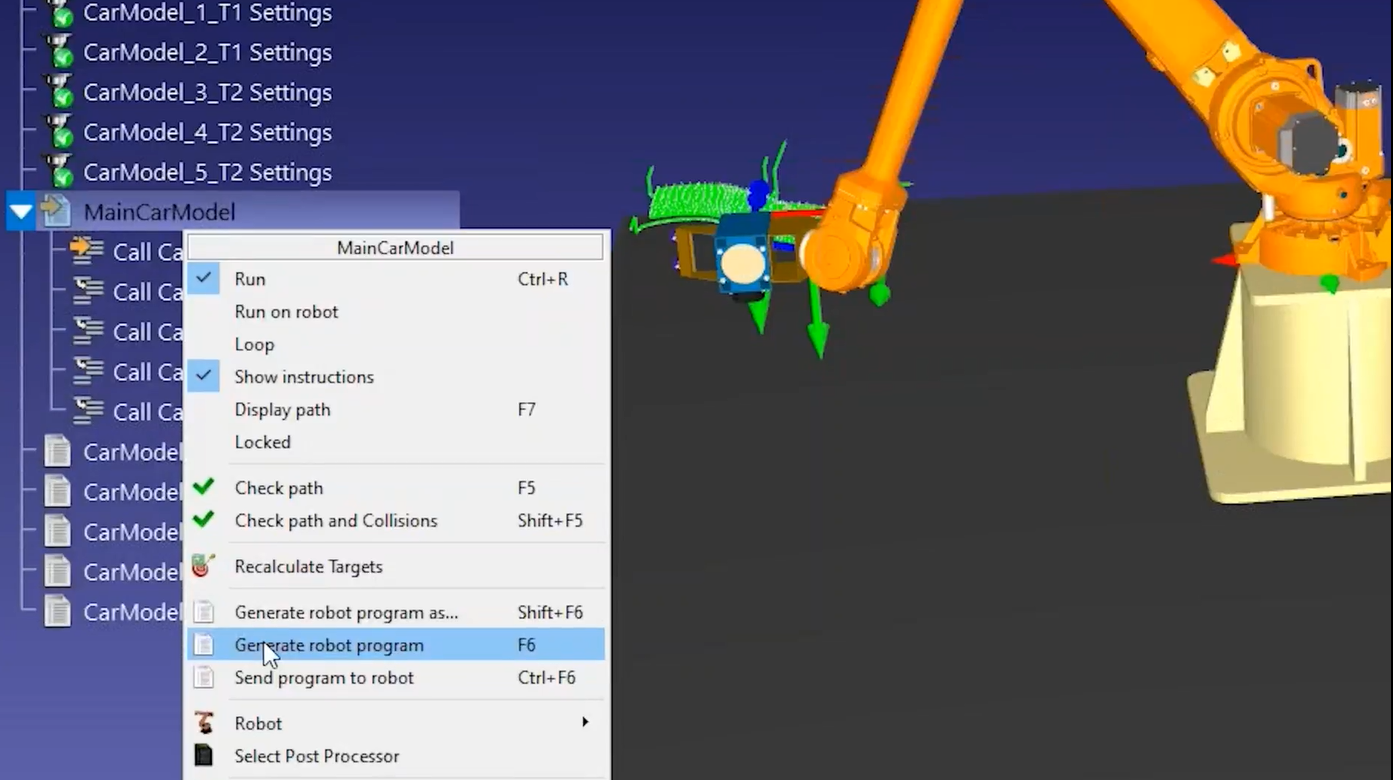
11.仿真验证通过后,右键程序选择:生成程序,创建控制器所需文件。