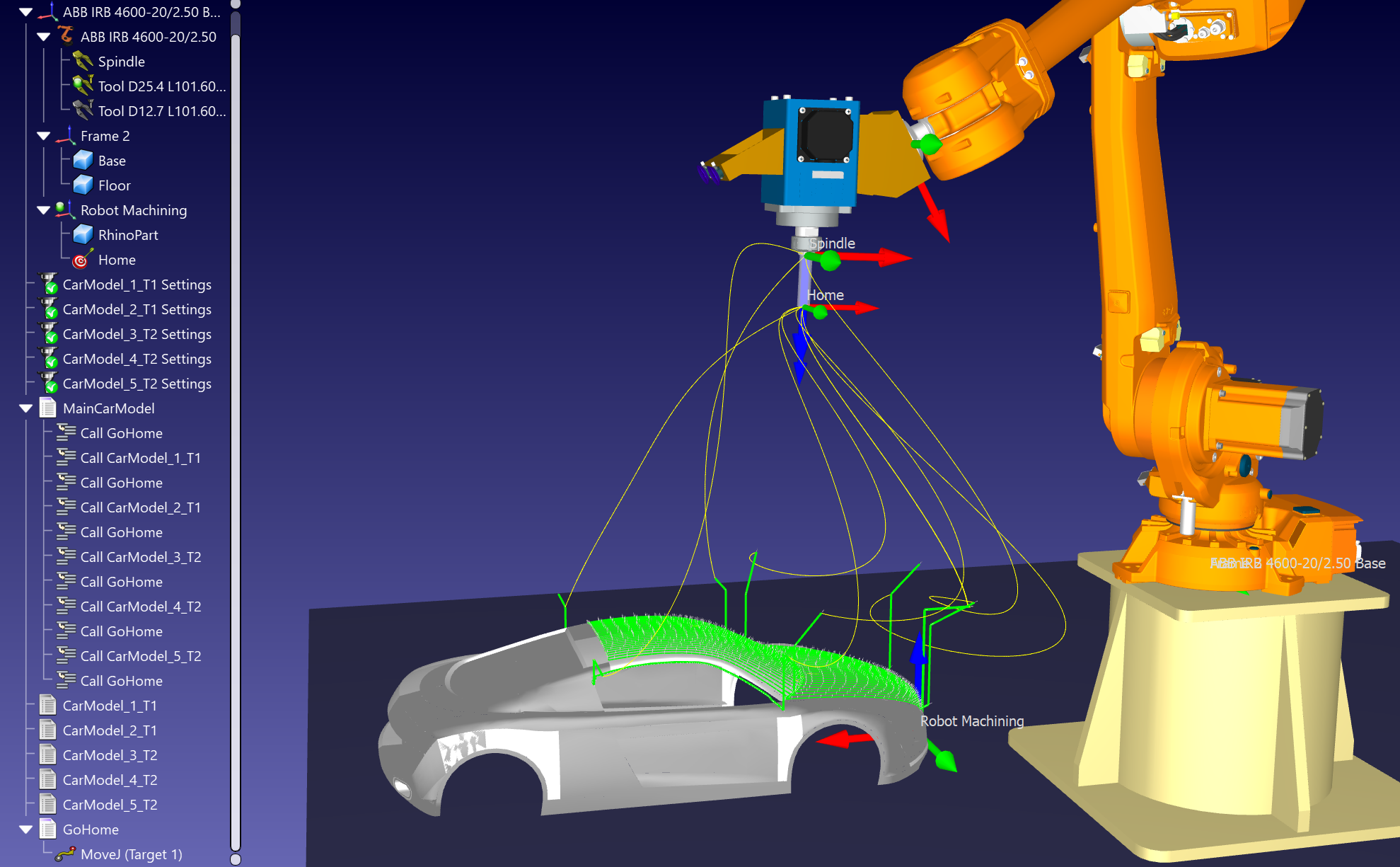
加工任务间的安全过渡
为保障各加工工序间的安全移动,可设置加工完成后返回过渡点。
创建GoHome程序的步骤:
1.选择程序➔ 添加程序或选择工具栏上的相应按钮,创建新程序。
2.按F2 键将程序重命名: GoHome 。
3.选择刚刚创建的程序。
4.将机器人移至安全位置,选择:程序→添加关节运动指令。
Tip:在入门部分了解更多有关如何创建目标和程序的信息。
5.右键首个程序调用指令,选择:添加指令→程序调用指令。
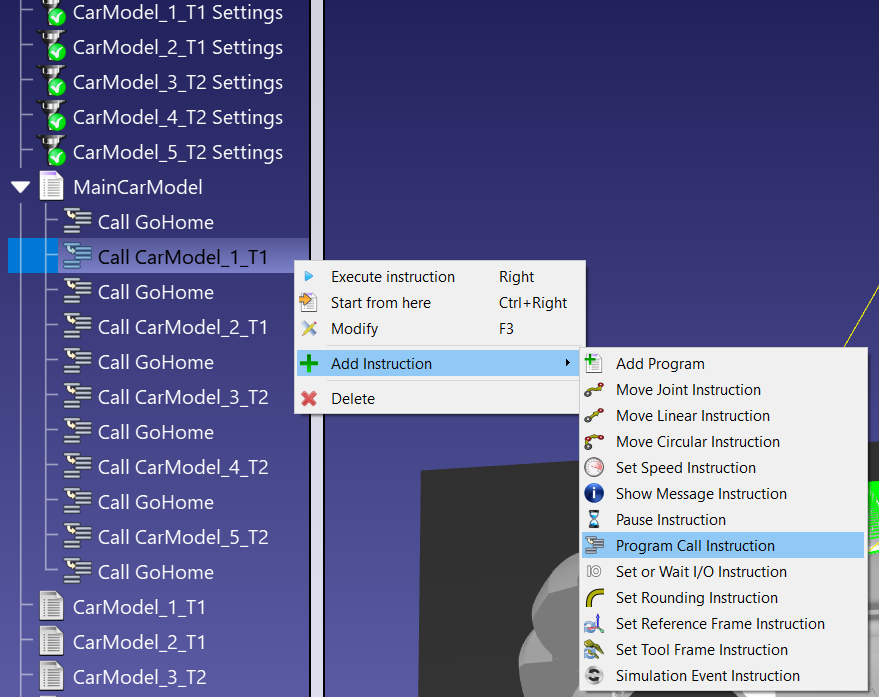
6.输入要转到的程序名称(GoHome),选择确定。
Tip:若无法添加指令,请先按Esc停止程序仿真。
7.复制/粘贴该指令快速完成程序编排。
8.右键主程序选择:显示路径查看黄色工具轨迹,确认过渡点位置是否合适。