自定义工具方向
通过示教功能可轻松调整加工路径上的刀具方向。
本示例中最后两个加工操作的方向可优化:
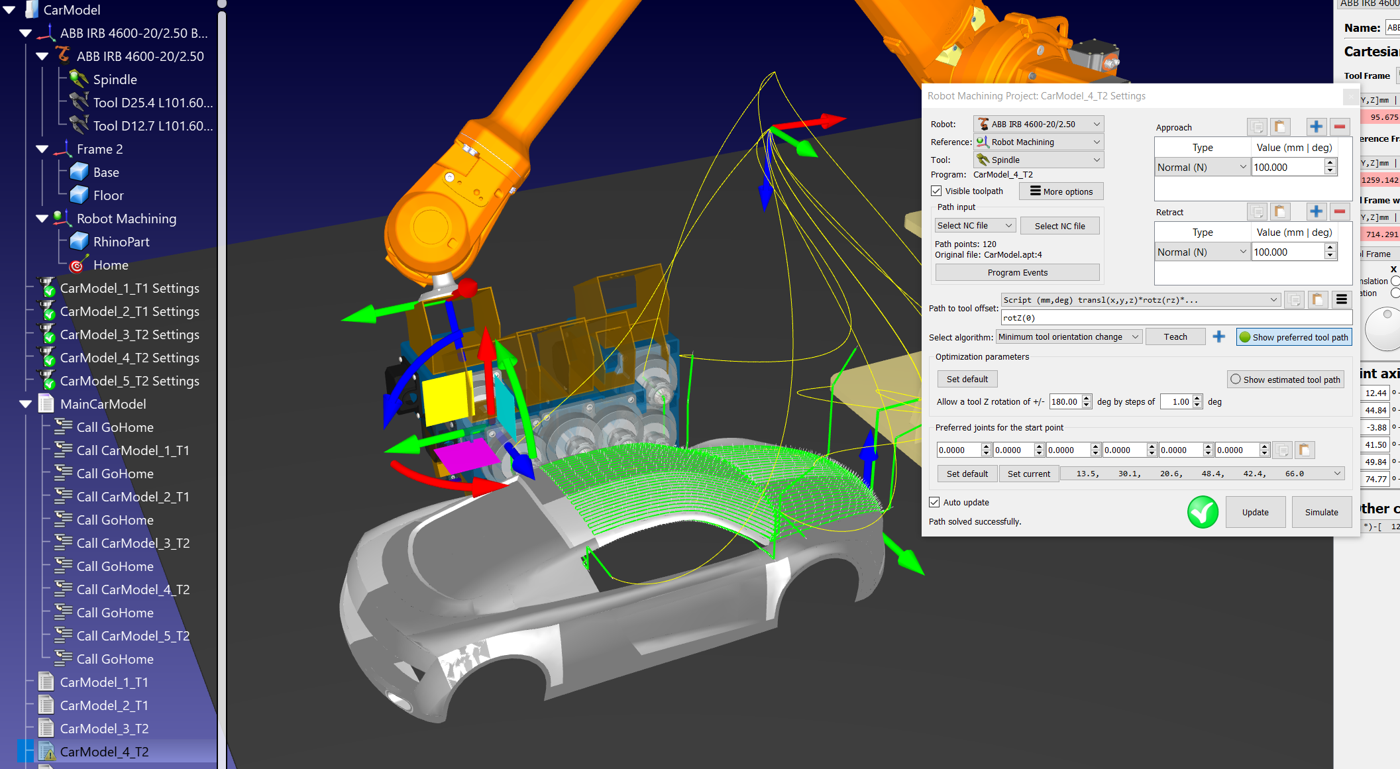
1.双击第4个加工操作打开参数设置。
2.运行仿真并在路径任意点暂停。
3.点击:显示优选的工具路径查看目标刀具方向。
4.按住ALT键抓取工具,拖动蓝色圆环绕Z轴旋转调整方向。
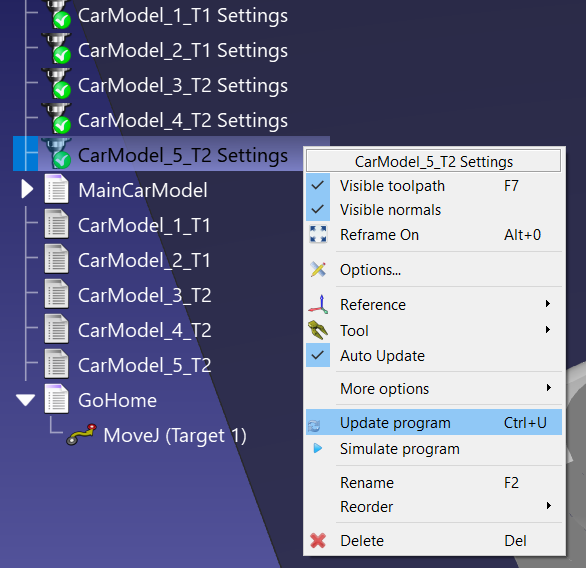
5.在加工菜单中选择"示教"锁定当前方向。
6.点击"更新"重新计算路径。
选择 "模拟 "运行模拟(或双击生成的程序)。
7.运行仿真验证效果后,可右键参数设置选择"复制设置"应用到其他路径,最后右键项目选择:升级程序。