Robot Machining (5x)
简介
本示例将帮助你理解如何在RoboDK中配置机器人加工参数,以及如何将5轴机器人加工程序转换为机器人加工仿真和机器人程序。
当你通过CAM软件定义好加工策略后,可以将加工程序导出为G代码或APT文件格式,以便导入RoboDK创建机器人加工项目。本示例将使用APT文件创建机器人加工项目。
你可以在以下路径找到本示例项目:C:/RoboDK/Other/Plugin-MecSoft/Car-Model.rdk。
Video:如何使用RoboDK的5轴机器人加工功能:https://www.youtube.com/watch?v=Pv7LljFTtI0。
机器加工示例(5 轴)
本示例展示如何从RhinoCAM导出通用5轴加工程序。你可以将所有加工操作导出为单一文件并在RoboDK中打开。
通过本示例,你将学习如何将加工任务转换为机器人加工仿真和机器人程序。具体而言,你将学习如何从NC文件(如G代码或APT文件)生成适用于机器人控制器的有效程序。
Tip:更多关于RoboDK机器人加工参数的设置,请参阅机器人加工章节。
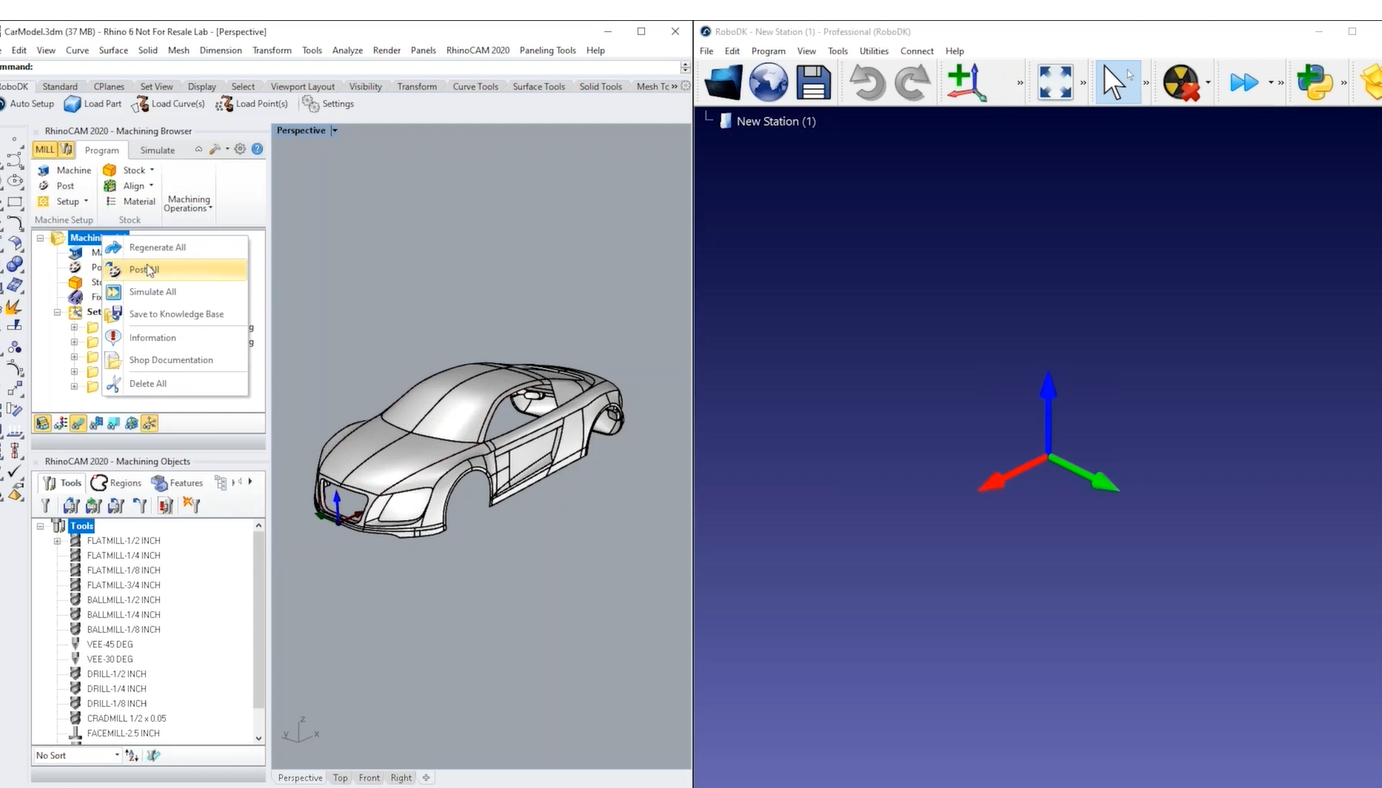
RhinoCAM 中的加工程序
本节展示如何从Mecsoft RhinoCAM软件导出加工程序到RoboDK。使用APT文件将刀具路径加载到RoboDK,并通过自定义BAT文件自动发送。
在RhinoCAM中按以下步骤导出加工程序:
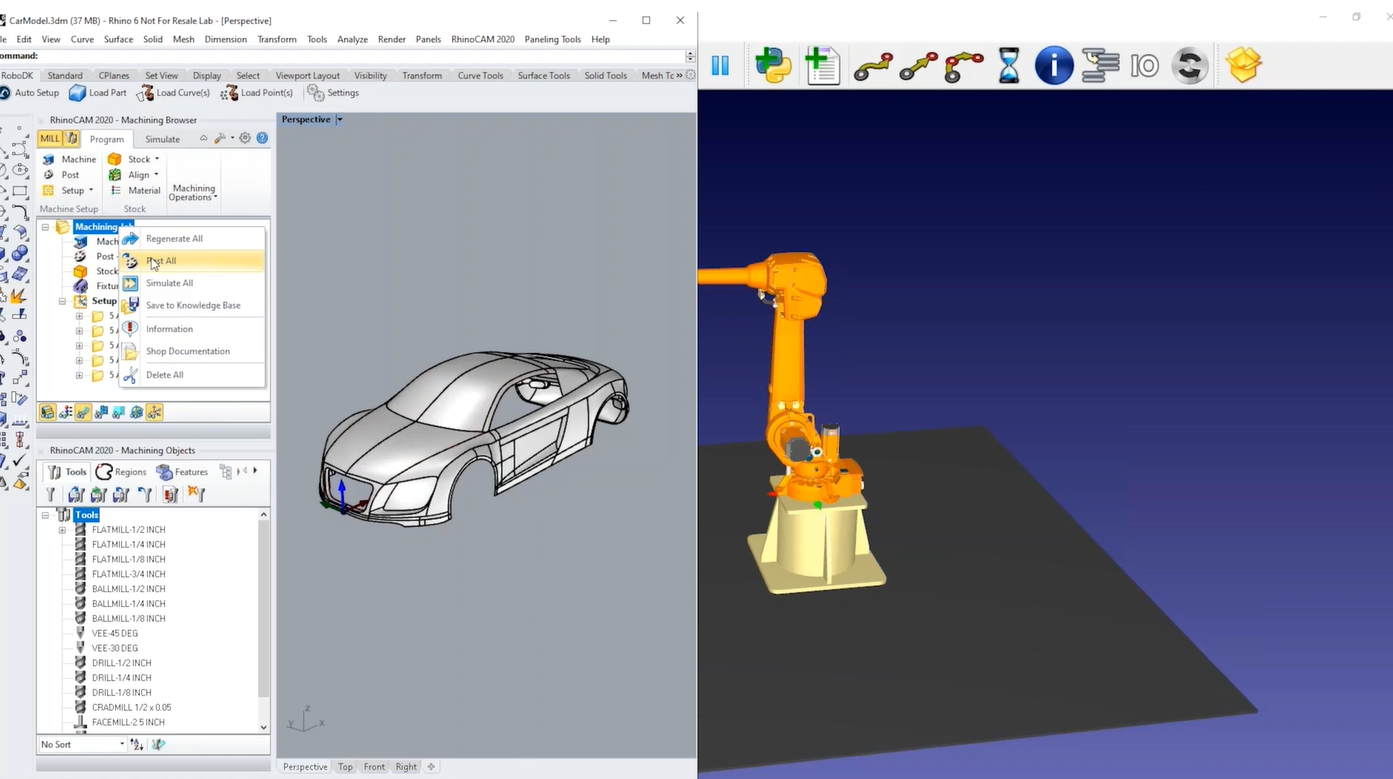
1.右键单击RhinoCAM 中的项目。
2.选择"Post All"生成加工程序并自动加载到RoboDK
机器加工项目(5轴)
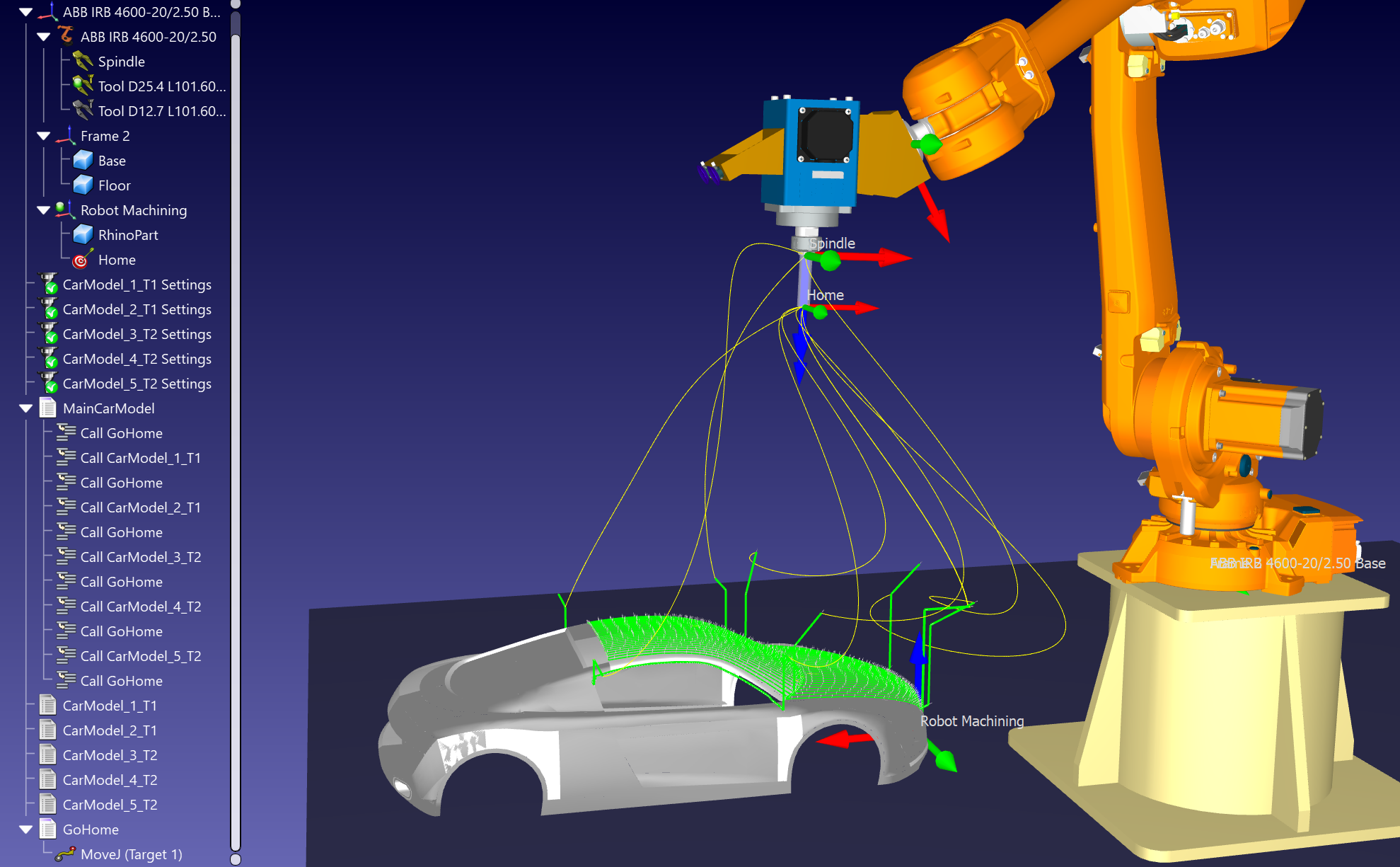
本节展示如何自定义机器人设置和加工路径以成功完成机器人加工。RoboDK中的加工项目允许你将任何通用5轴制造操作转换为机器人仿真和机器人程序。
你会注意到每个加工操作在RoboDK中都被自动拆分为独立的机器人加工项目。默认情况下,KUKA工作站会随加工程序一起加载,这是因为我们通过RhinoCAM使用自定义bat文件导出的结果。
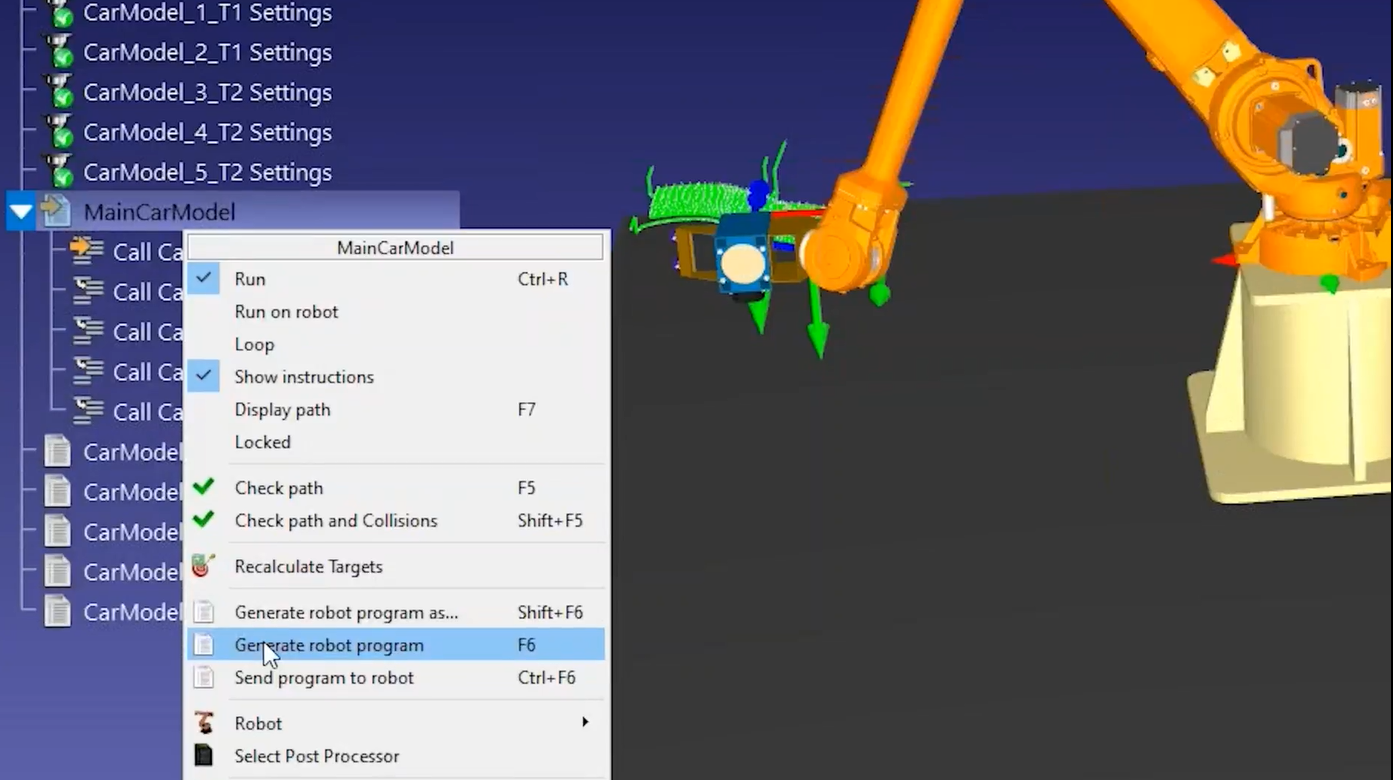
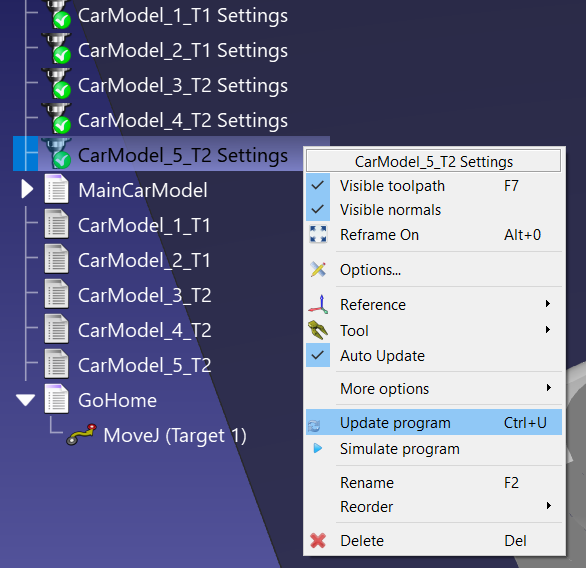
1.你可以选择每个机器人加工项目的选项:更新,或批量选择刀具路径后点击:更新程序在RoboDK环境中生成对应机器人程序。
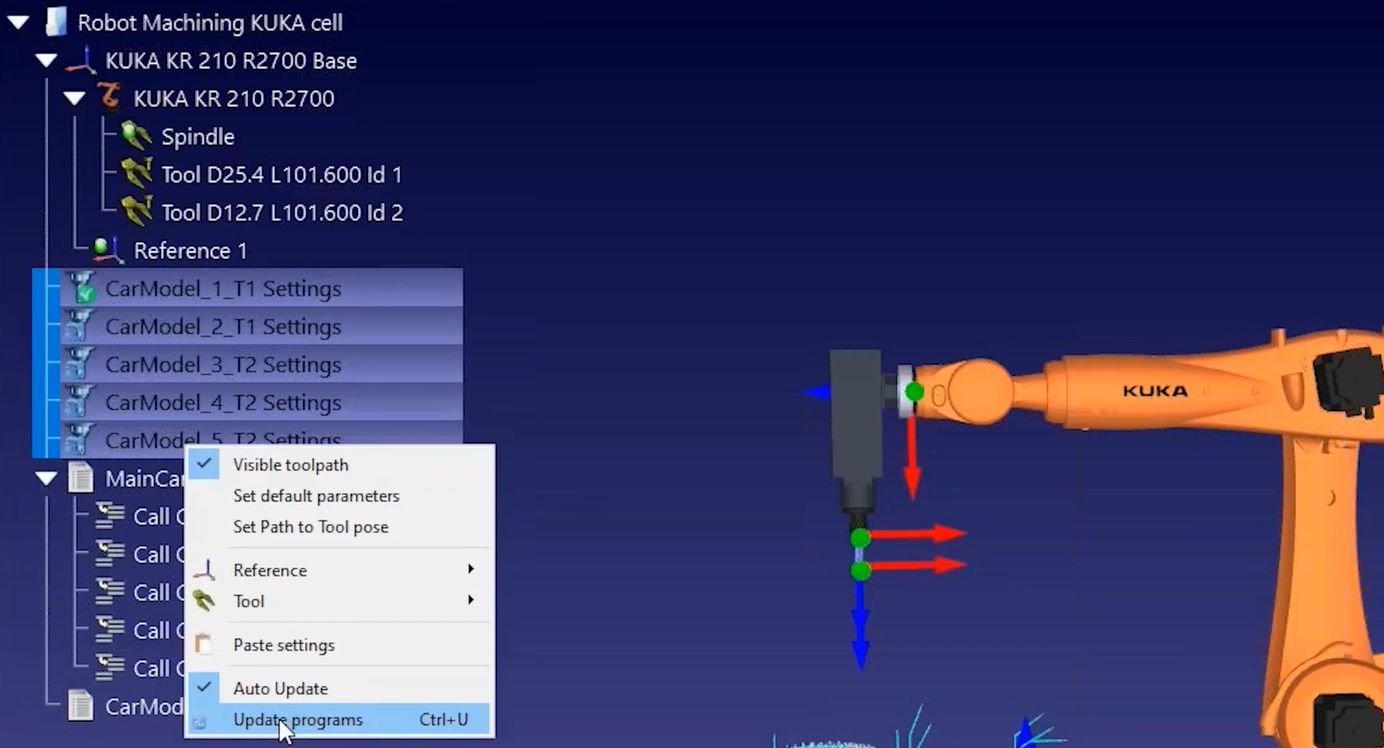
2.也可以通过批量选择程序后点击:生成机器人程序直接创建。
选择机器人
本节展示如何创建新工作站。
按以下步骤构建新的机器人加工工作站:
1.选择:文件➔ 新建工作站。
2.可以通过选择:文件➔ 打开机器人库来访问资源库。
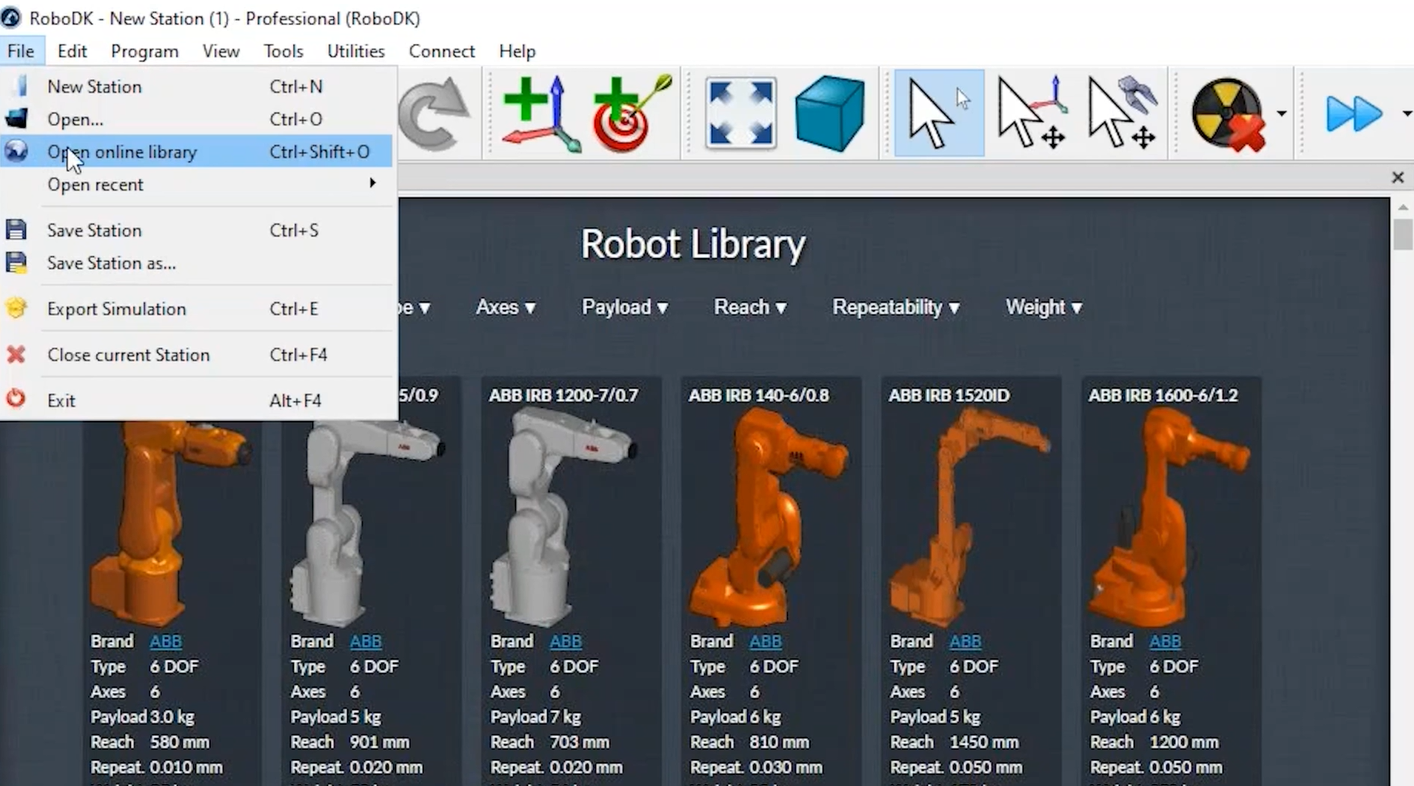
3.找到机器人后,选择:Download,即可在项目中打开机器人。
Note: 每个机器人都会自带其基准坐标系作为参考系.
Tip:你也可以加载STEP、IGES、STL等格式的3D模型。可通过拖放或文件→打开方式导入。更多项目构建技巧请参阅入门指南章节。
Tip:创建机器人加工项目后,可通过右键机器人选择"替换机器人"快速更换机型,这比重建整个工作站更高效。
创建机器人加工坐标系
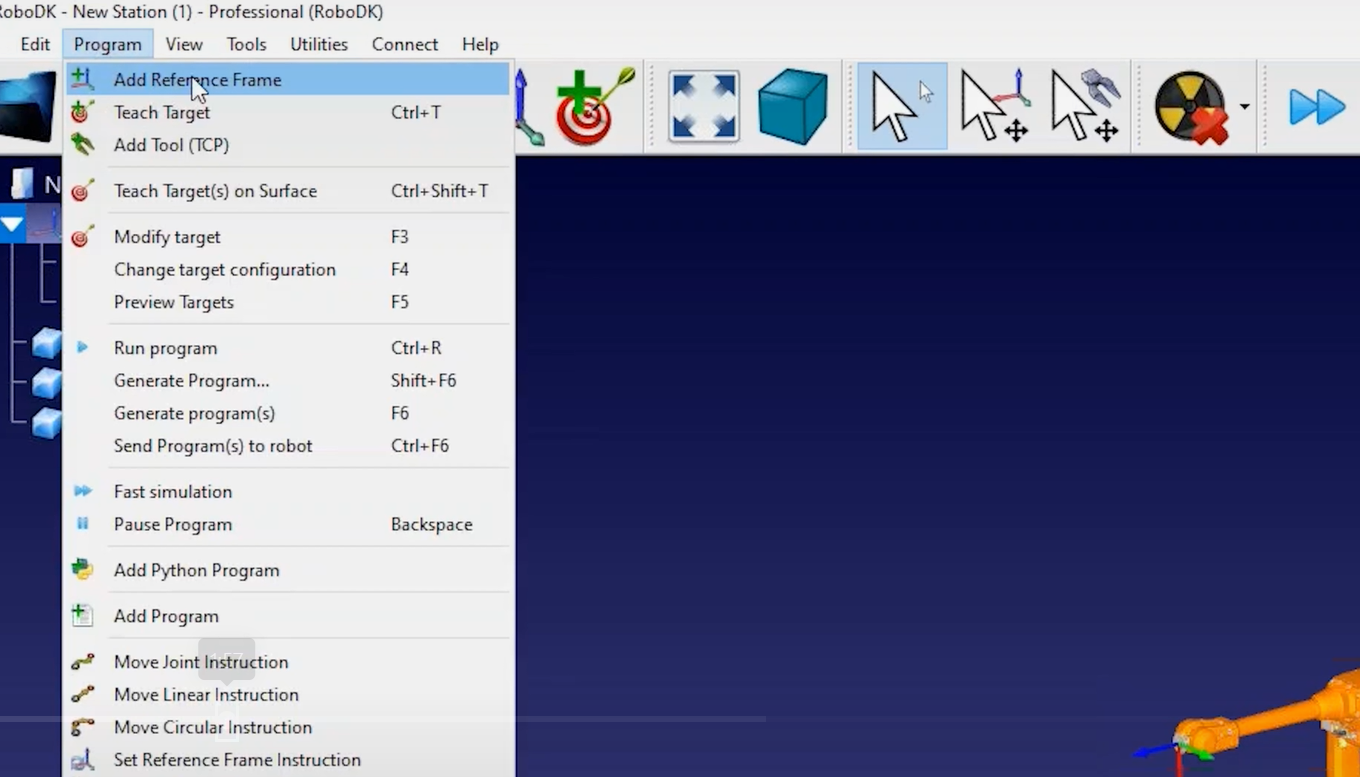
您可以为机器人加工夹具创建一个新的坐标系,在菜单栏选择:程序→添加参考坐标系,可为加工夹具创建新坐标系。
Tip:也可通过工具栏对应按钮添加参考系。
Note:将加载的物体拖放到树状图中新坐标系下可建立关联。
Tip:若加载了刀具3D模型,将其拖放到机器人条目下,RoboDK会自动将其转换为工具。详见入门指南。
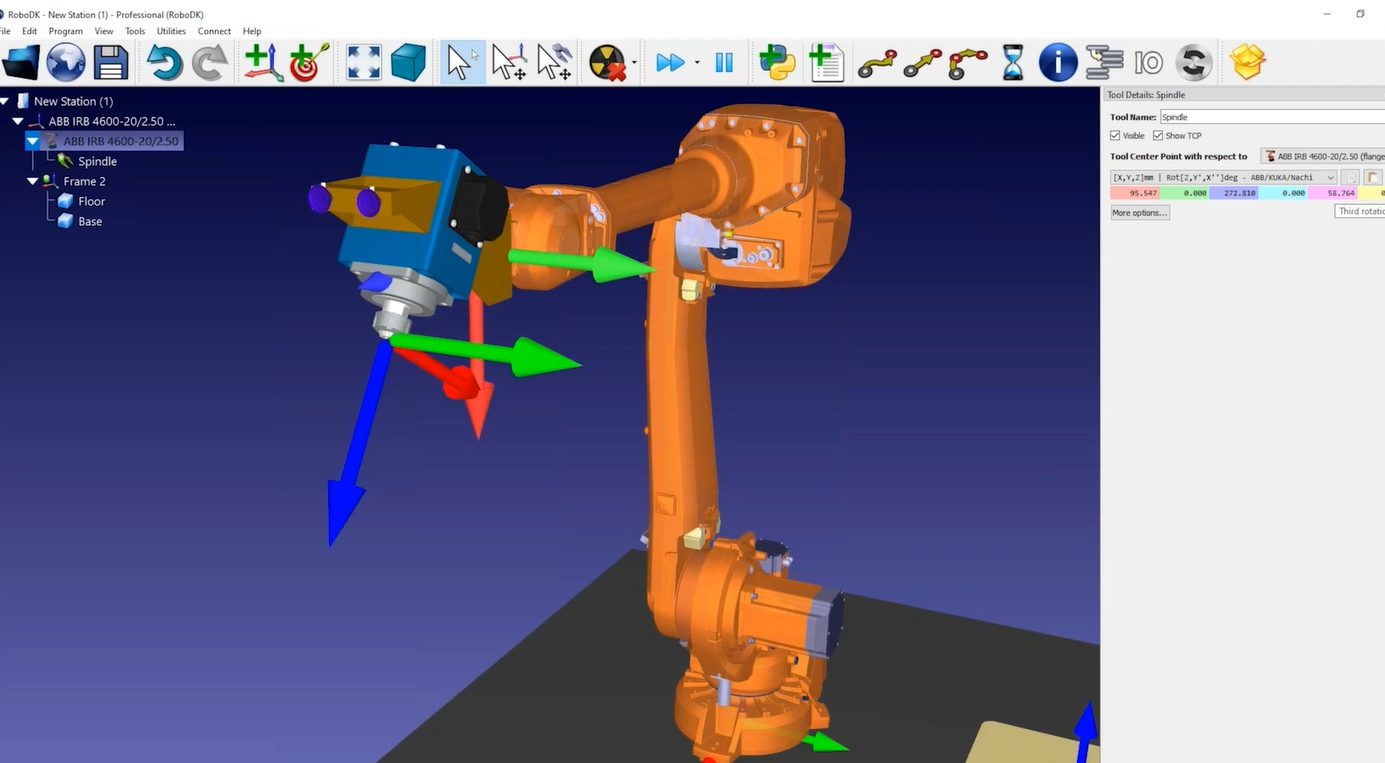
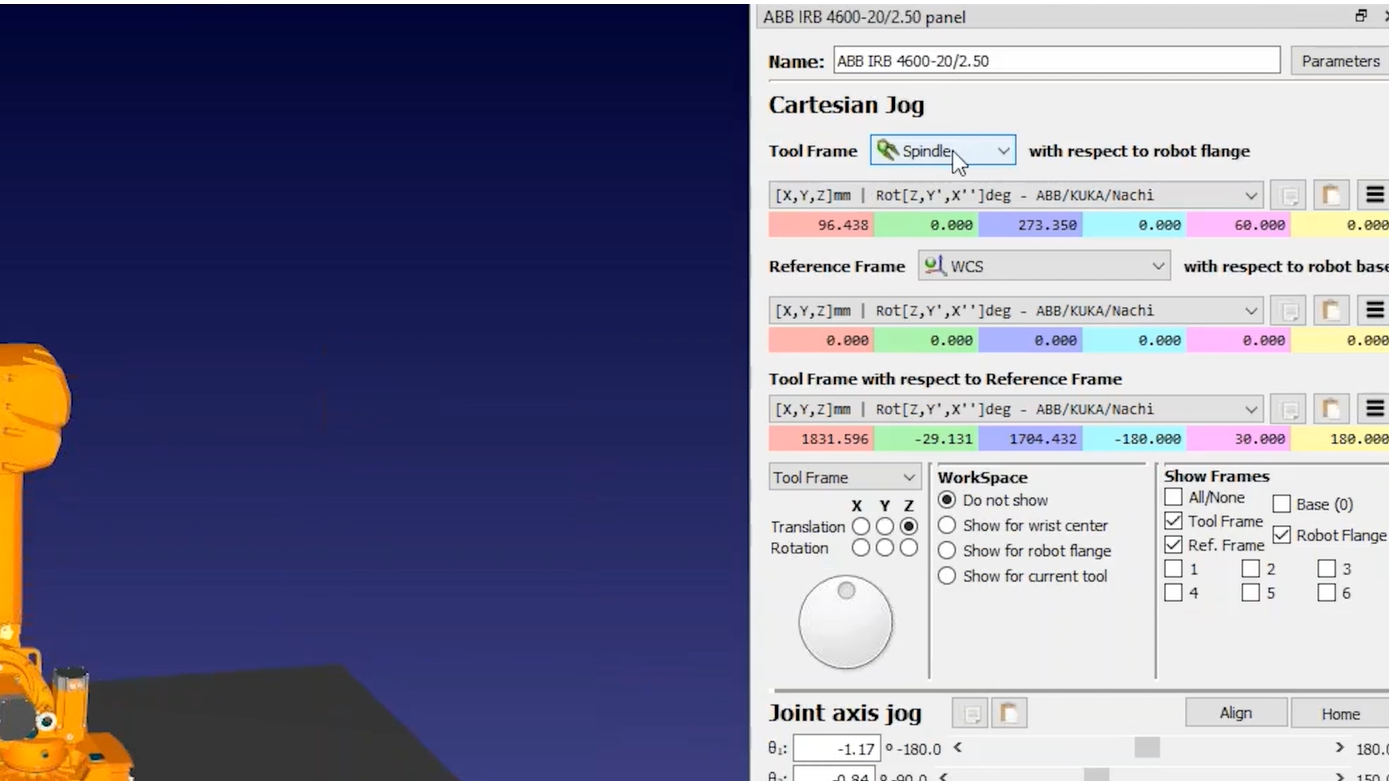
Tip:双击工具可调整几何位置参数。
按以下步骤正确定义工具(TCP):
1.输入已知工具坐标(支持多种厂商特定的姿态格式)。
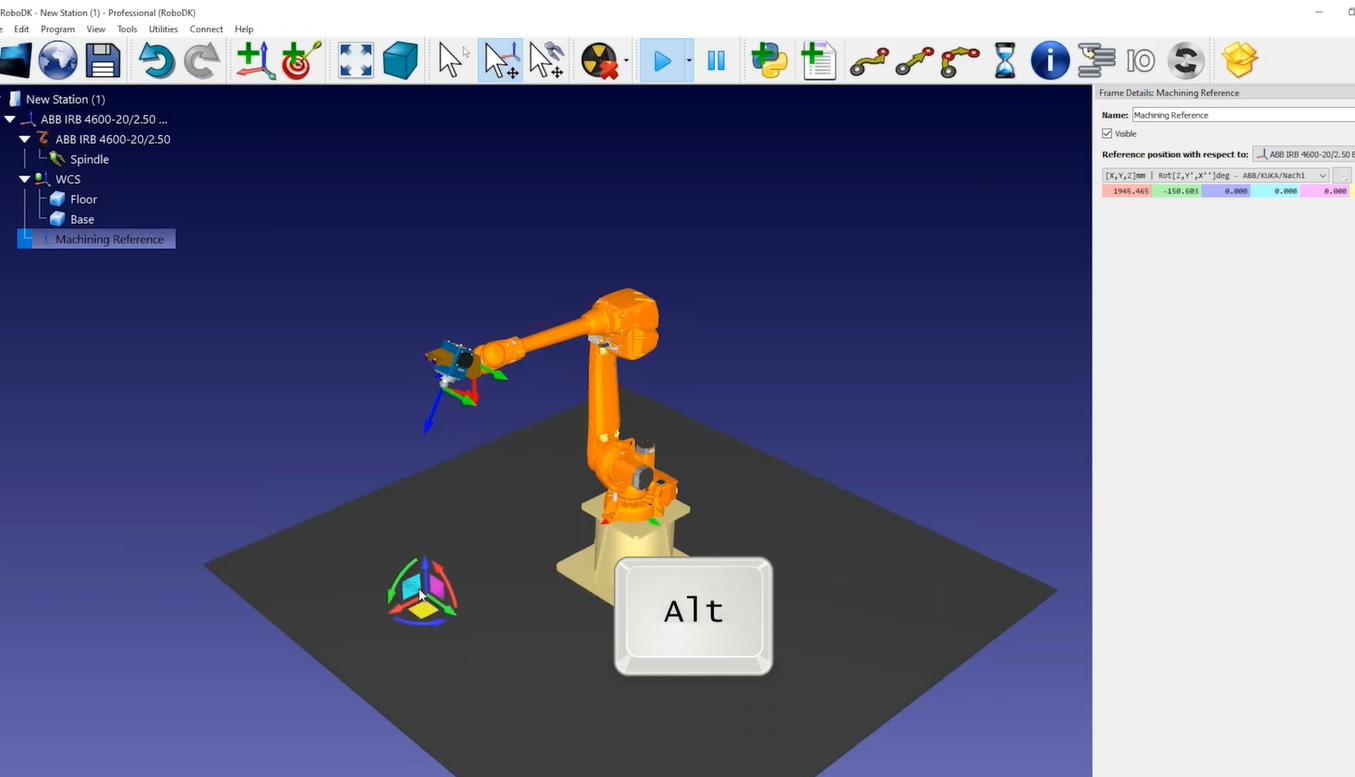
2.按住ALT键可移动机器人或任何坐标系。
3.同时按住ALT+Shift键可调整TCP位置和方向。
Note:坐标系操作同理。若某坐标系代表世界坐标系,可双击将其坐标归零或右键选择"重置"。
创建加工基准坐标系的步骤:
4.选择菜单栏:程序,然后选择:添加参考坐标系。
5.按F2或右键选择"重命名"修改树状图项目名称。
Tip:是否将坐标系关联到机器人底座会影响非原点安装的机器人。输入坐标值时需注意参考基准(通常为机器人底座)。
6.按住ALT键可自由移动坐标系到理想位置。
7.双击机器人可查看当前使用的工具和坐标系。机器人面板显示值应与控制器显示值一致。
保存机器人工作站的步骤:
8.完成构建后选择:文件→保存工作站,将所有设置和3D模型保存为单一RDK文件。
9.在RoboDK中加载加工程序文件,系统会自动为每个加工操作创建项目。
10.点击"更新"检查默认参数下是否可行,也可批量更新所有操作。
11.仿真验证通过后,右键程序选择:生成程序,创建控制器所需文件。
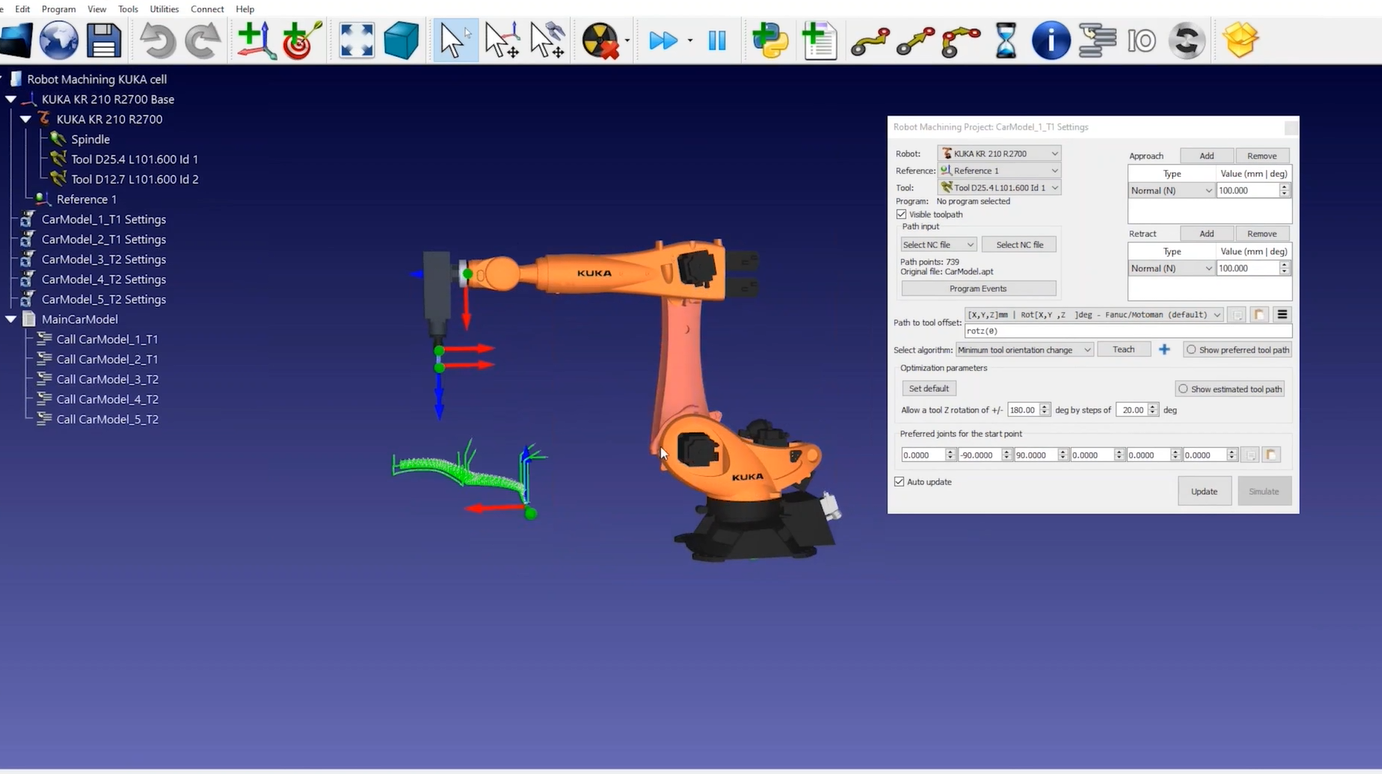
自定义工具方向
通过示教功能可轻松调整加工路径上的刀具方向。
本示例中最后两个加工操作的方向可优化:
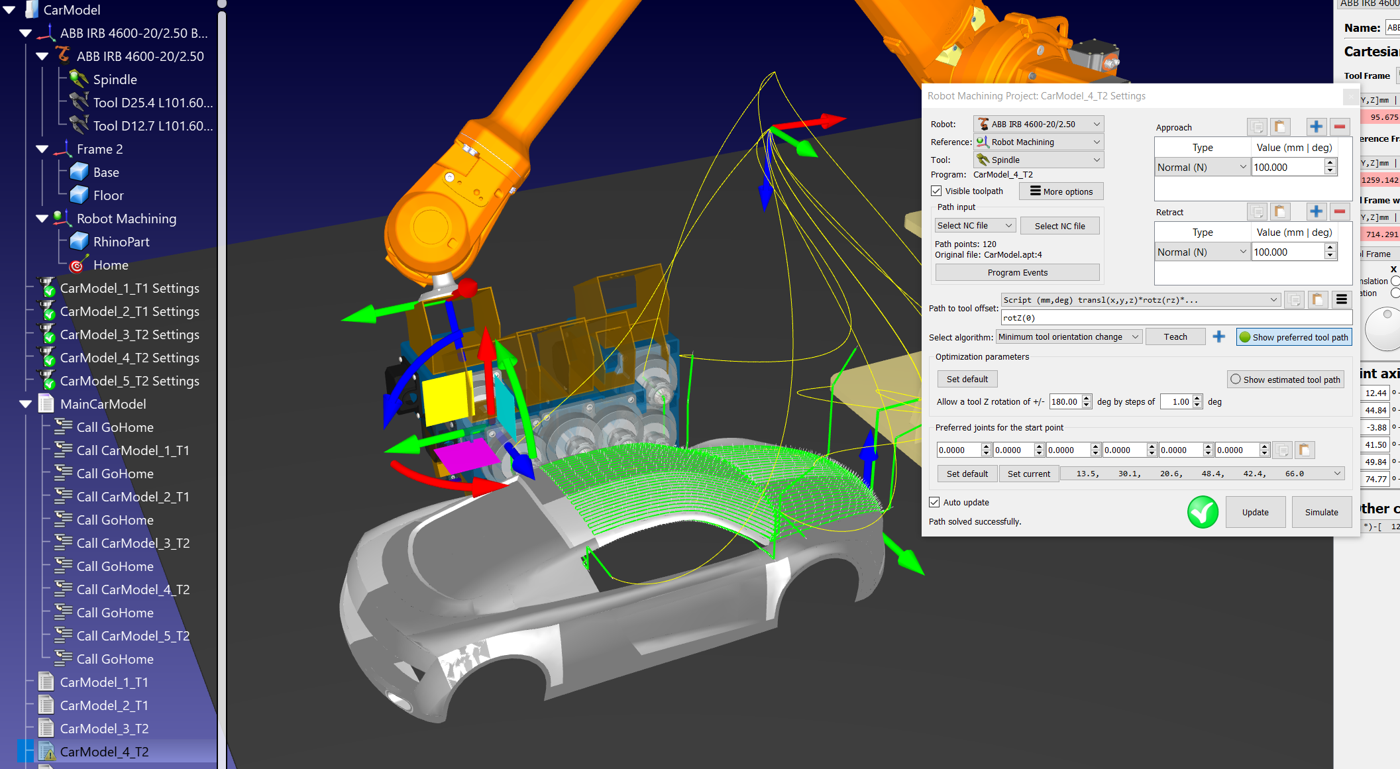
1.双击第4个加工操作打开参数设置。
2.运行仿真并在路径任意点暂停。
3.点击:显示优选的工具路径查看目标刀具方向。
4.按住ALT键抓取工具,拖动蓝色圆环绕Z轴旋转调整方向。
5.在加工菜单中选择"示教"锁定当前方向。
6.点击"更新"重新计算路径。
选择 "模拟 "运行模拟(或双击生成的程序)。
7.运行仿真验证效果后,可右键参数设置选择"复制设置"应用到其他路径,最后右键项目选择:升级程序。
加工任务间的安全过渡
为保障各加工工序间的安全移动,可设置加工完成后返回过渡点。
创建GoHome程序的步骤:
1.选择程序➔ 添加程序或选择工具栏上的相应按钮,创建新程序。
2.按F2 键将程序重命名: GoHome 。
3.选择刚刚创建的程序。
4.将机器人移至安全位置,选择:程序→添加关节运动指令。
Tip:在入门部分了解更多有关如何创建目标和程序的信息。
5.右键首个程序调用指令,选择:添加指令→程序调用指令。
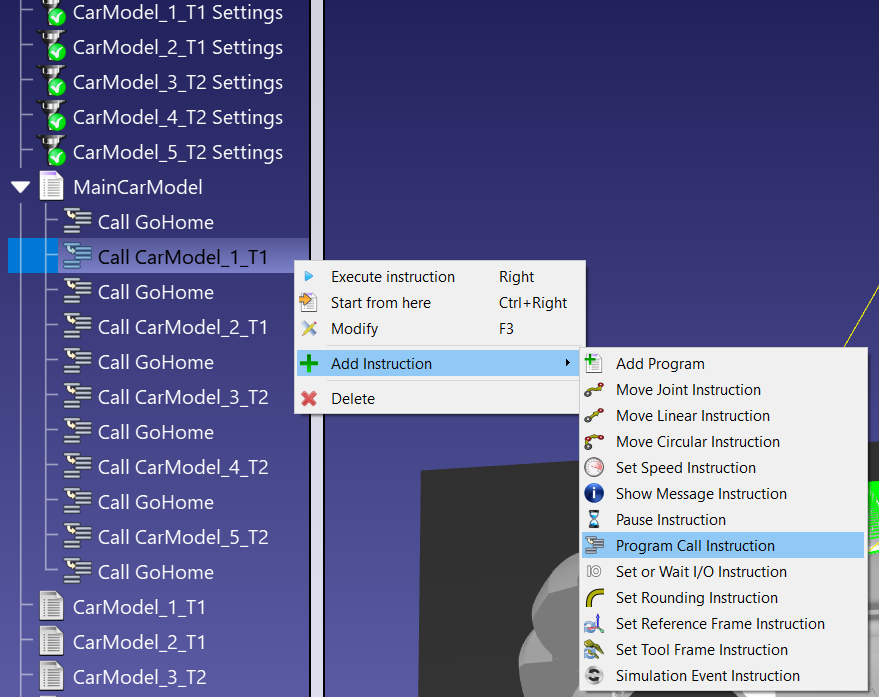
6.输入要转到的程序名称(GoHome),选择确定。
Tip:若无法添加指令,请先按Esc停止程序仿真。
7.复制/粘贴该指令快速完成程序编排。
8.右键主程序选择:显示路径查看黄色工具轨迹,确认过渡点位置是否合适。