点胶示例
项目初始化需从默认库加载点胶示范文件。
设置工作站
该示例使用了川崎RS007N机械臂、点胶末端执行器、油底壳工件、定位夹具组。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
加载步骤:
1.选择:文件 ➔
2.从RoboDK 的示例文件夹找到点胶示例:
C:/RoboDK/Examples/Plugin-SolidWorks-Liquid-Dispensing.rdk.
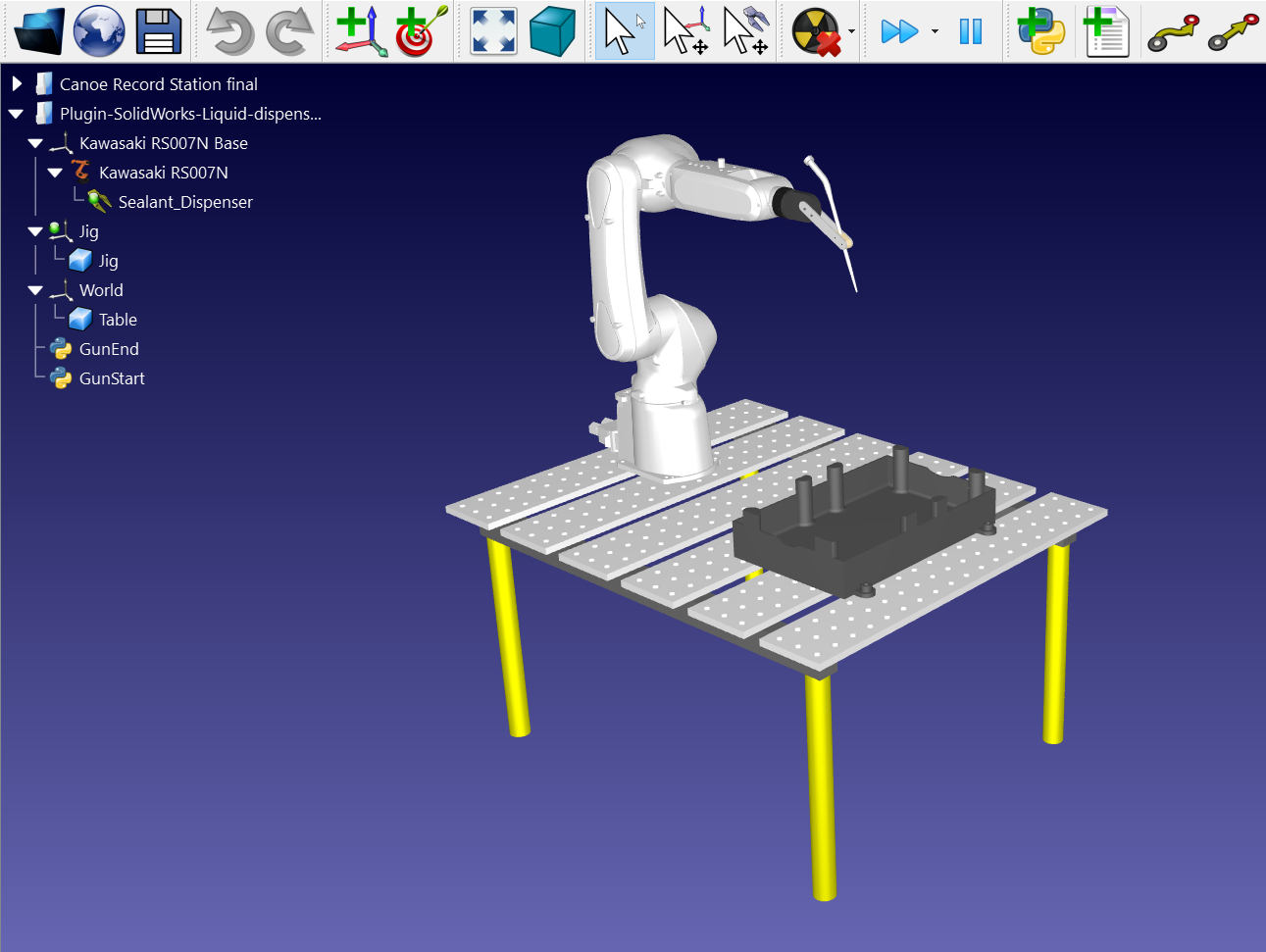
现在你已经加载了工作站,可以打开 SolidWorks。
绘制SolidWorks 2D 草图
在 SolidWorks 中打开3D物体。在本例中,3D物体是一个油盘,有一个需要填充的凹槽。
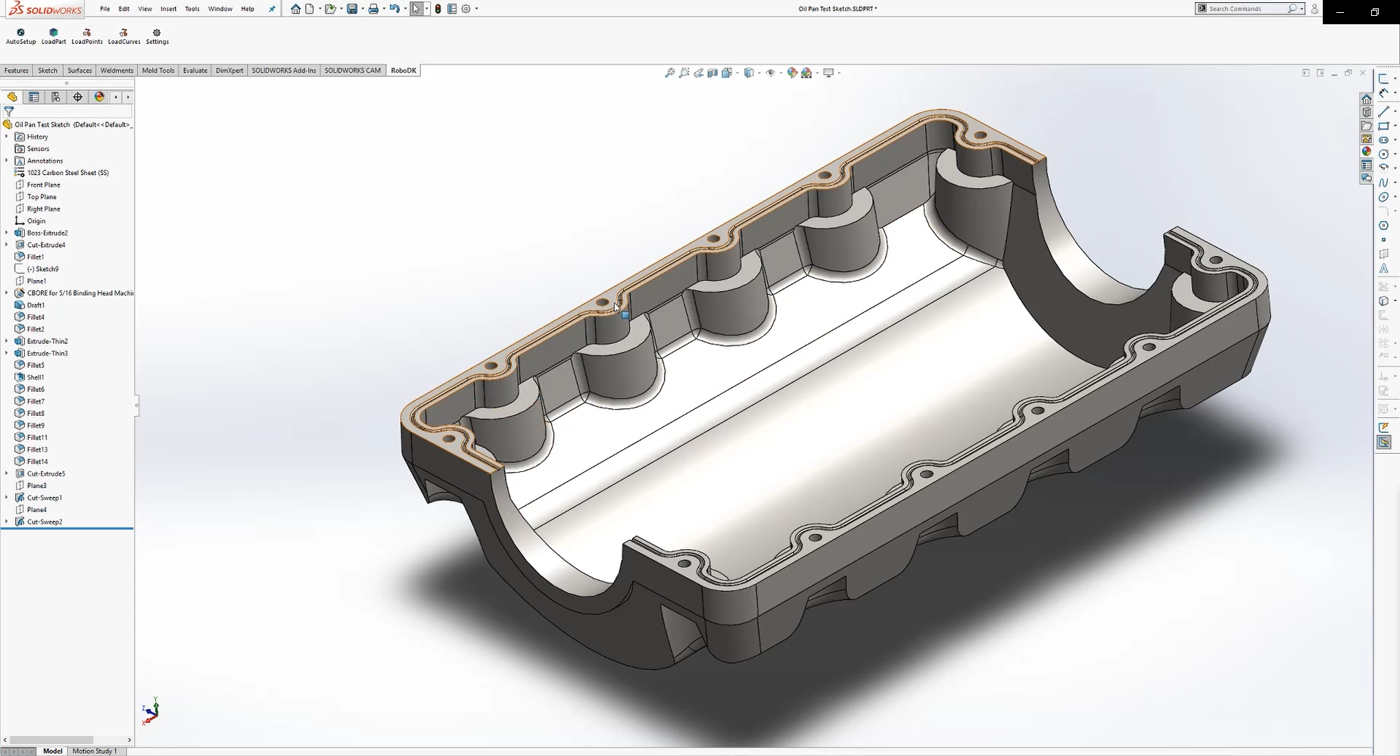
这个项目的目标是在顶部凹槽中心线施胶,那么密封胶精确沿槽道中心线分布,胶体不得溢出槽壁,这样保证流动平顺性。
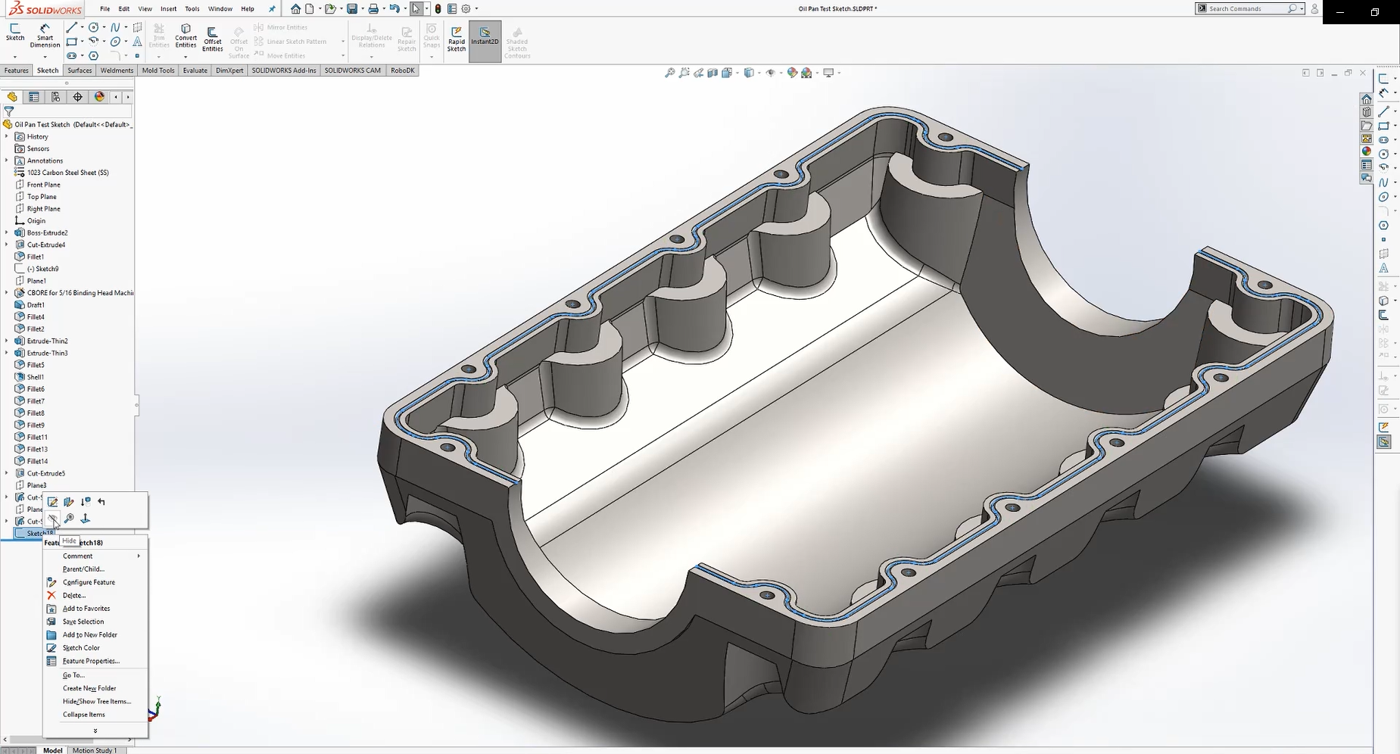
草图创建流程:
1.选择:Sketch 选项卡,点击Sketch按钮创建新草图
2.选取3D模型边缘
3.在其上单击右键,然后按:Select Tangency,自动选择凹槽的整个边缘
4.选择:Offset Entities按钮,输入槽宽半值(本案1.5mm)
这样,机器人就有了完整的工具路径。对油盘的另一侧重复同样的操作。确保草图如下图所示可见,以便使用 RoboDK 的插件选择草图。
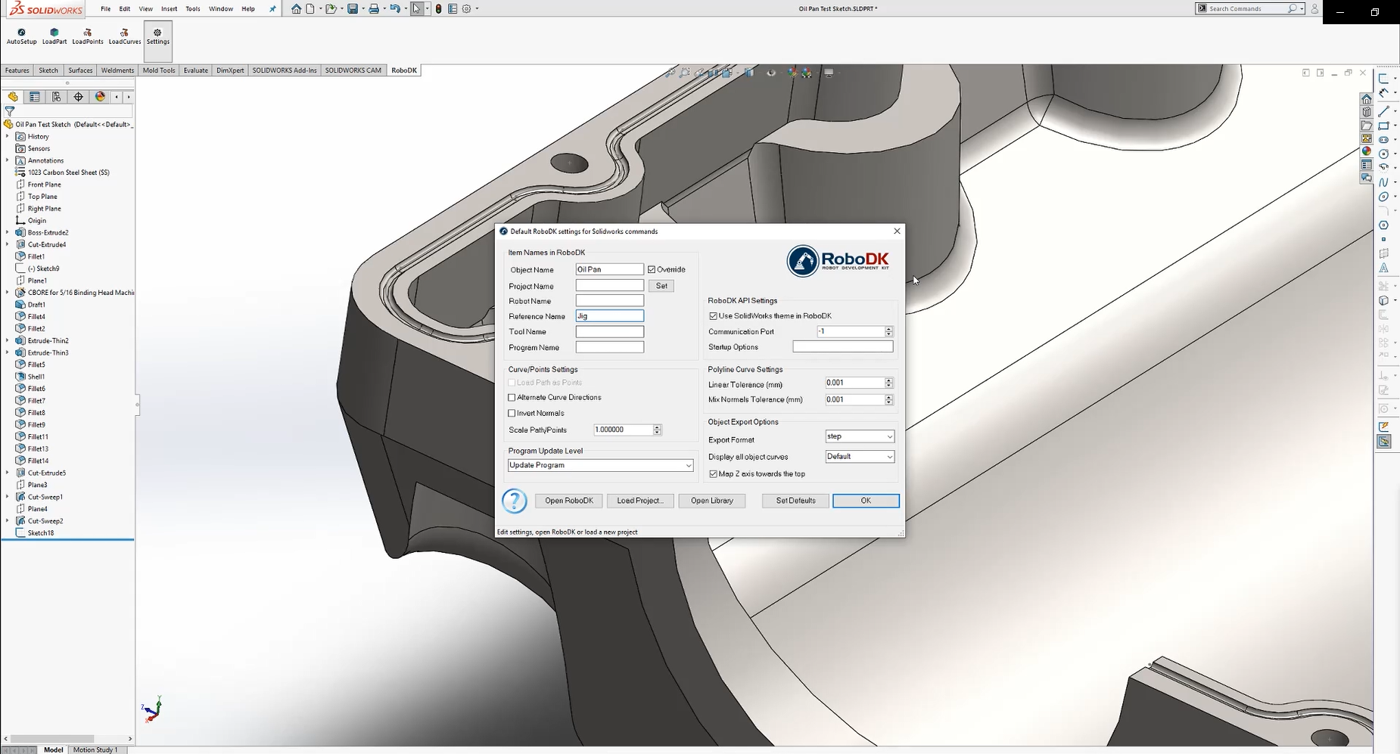
数据导出至RoboDK:
1.选择:RoboDK 选项卡,然后选择
2.在 RoboDK 中输入Object Name。本例中为Oil Pan油盘。
3.输入你希望导出的Reference Name。本例中为 Jig。
4.关闭 "Setting "窗口或选择 "OK"。
5.在 SolidWorks 中选择
6.选择草图的所有线条和面,然后OK。
7.选择
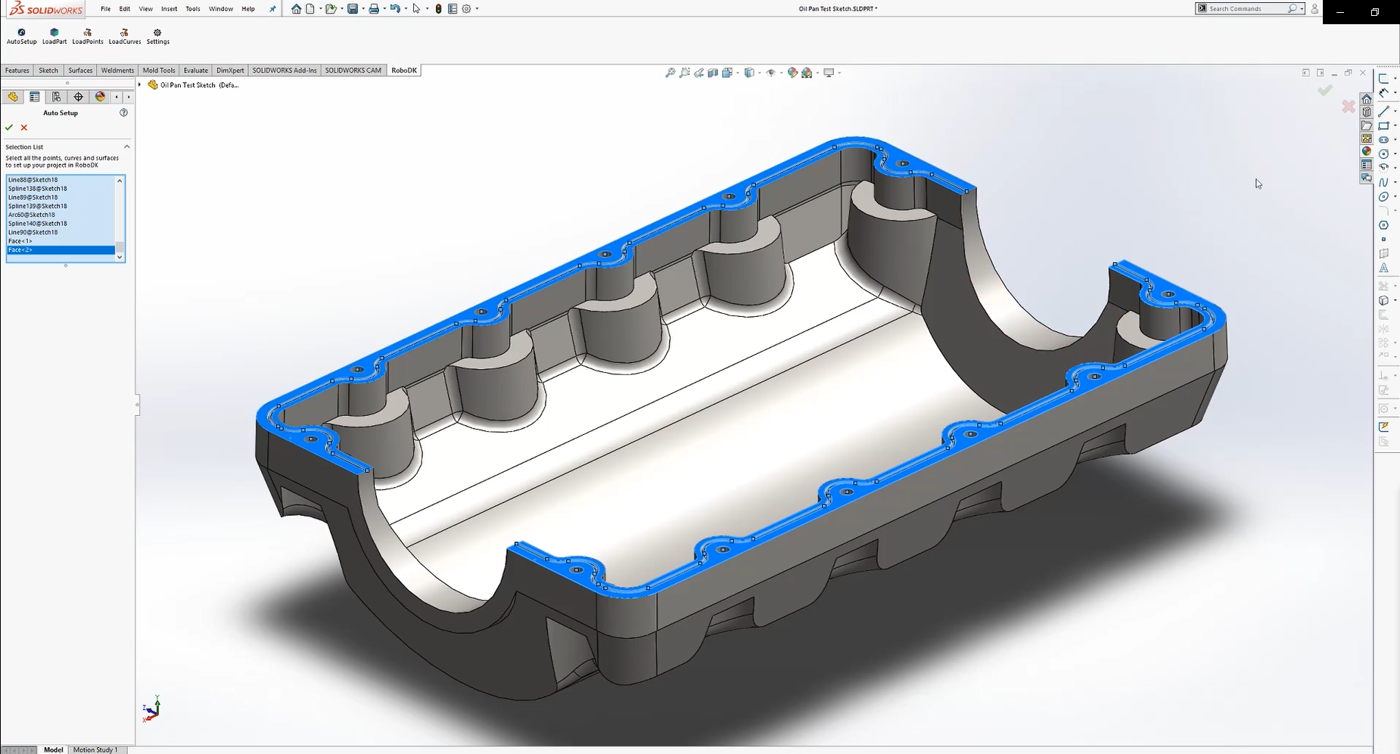
你会看到工件自动加载到激活参考系(夹具)上,并在 RoboDK 中看到一个新的曲线跟踪项目,该项目遵循刀具路径。
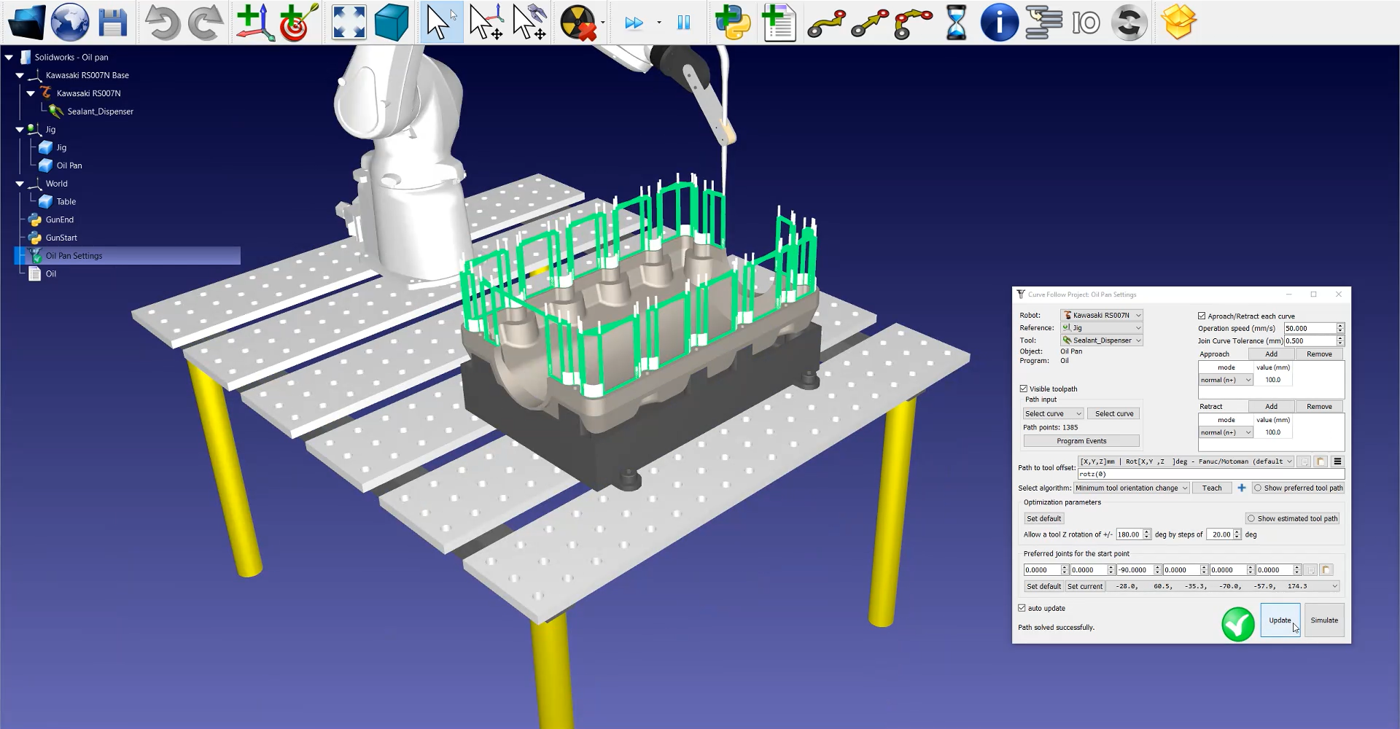
设置工作站
接下来,你可以点击工作站的曲线跟踪项目:
如果要重新排序或切换路径部分的意义,请按照以下步骤操作:
1.单击曲线跟踪项目:
2.右键单击管理平台的空白区域,选择:复位选择。
3.前往路径的起点,选择第一段。点击右键,确保其指向正确方向,可以点击反转方向按钮。
4.选择:自动选择下一条曲线 或 自动选择所有,可按正确顺序自动选择路径的每一段。
5.最后选择:完成。这将返回 RoboDK 设置窗口。
工具姿态调整:
1.如下图所示,选择:选择优选的工具路径,可以让我们直观地看到工具沿路径移动的情况。
2.修改rotz 值。本例中设置为 -90°。
3.选择:更新➔ 模拟。
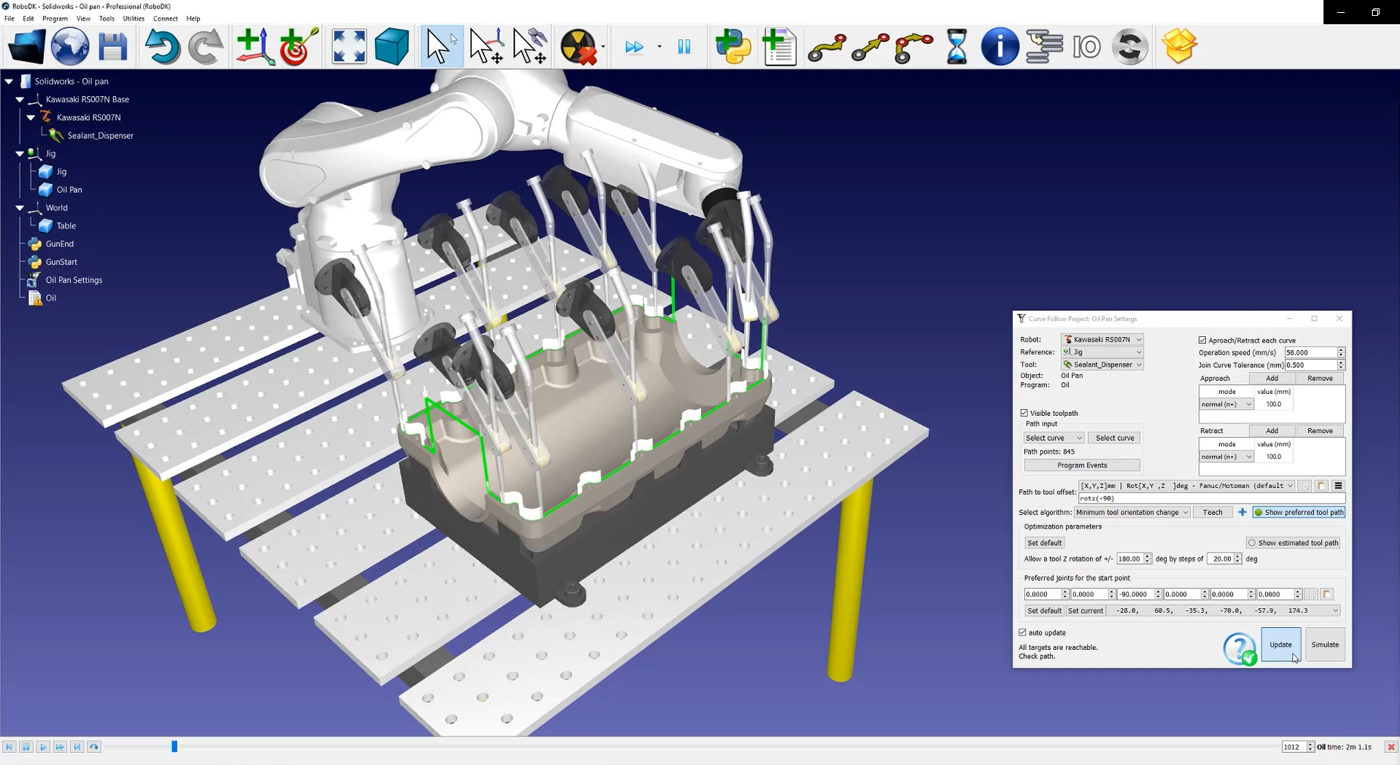
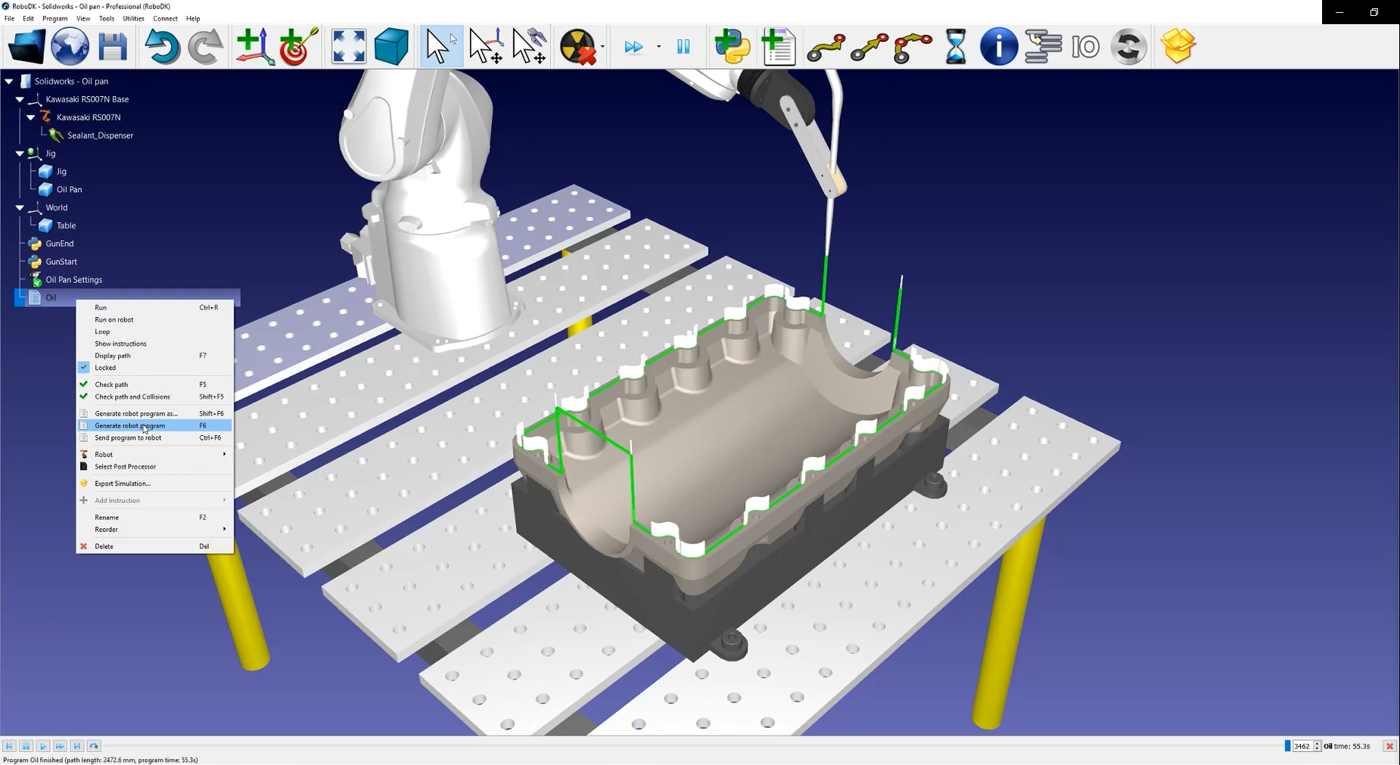
要生成机器人程序,请右键单击程序
最终生成.pg格式可执行文件,可直接导入控制器。