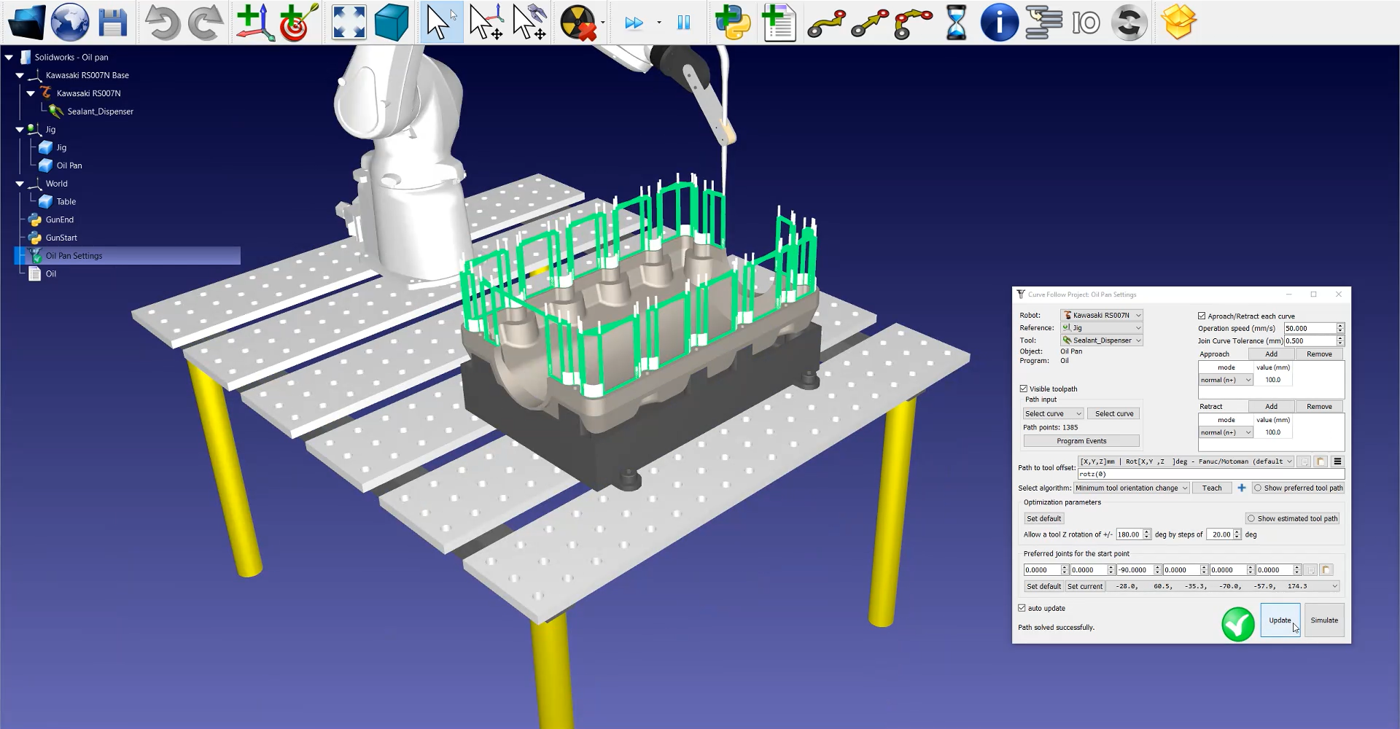
设置工作站
接下来,你可以点击工作站的曲线跟踪项目:
如果要重新排序或切换路径部分的意义,请按照以下步骤操作:
1.单击曲线跟踪项目:
2.右键单击管理平台的空白区域,选择:复位选择。
3.前往路径的起点,选择第一段。点击右键,确保其指向正确方向,可以点击反转方向按钮。
4.选择:自动选择下一条曲线 或 自动选择所有,可按正确顺序自动选择路径的每一段。
5.最后选择:完成。这将返回 RoboDK 设置窗口。
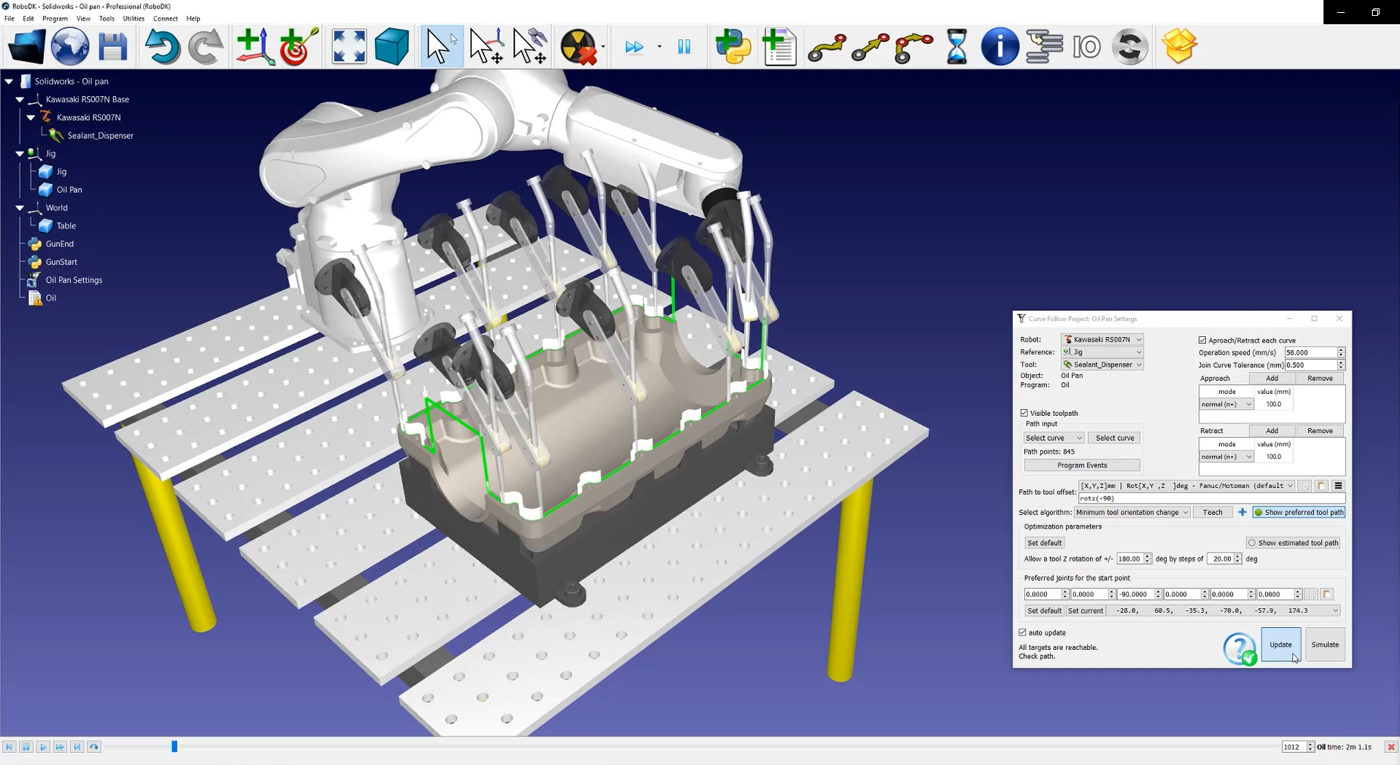
工具姿态调整:
1.如下图所示,选择:选择优选的工具路径,可以让我们直观地看到工具沿路径移动的情况。
2.修改rotz 值。本例中设置为 -90°。
3.选择:更新➔ 模拟。
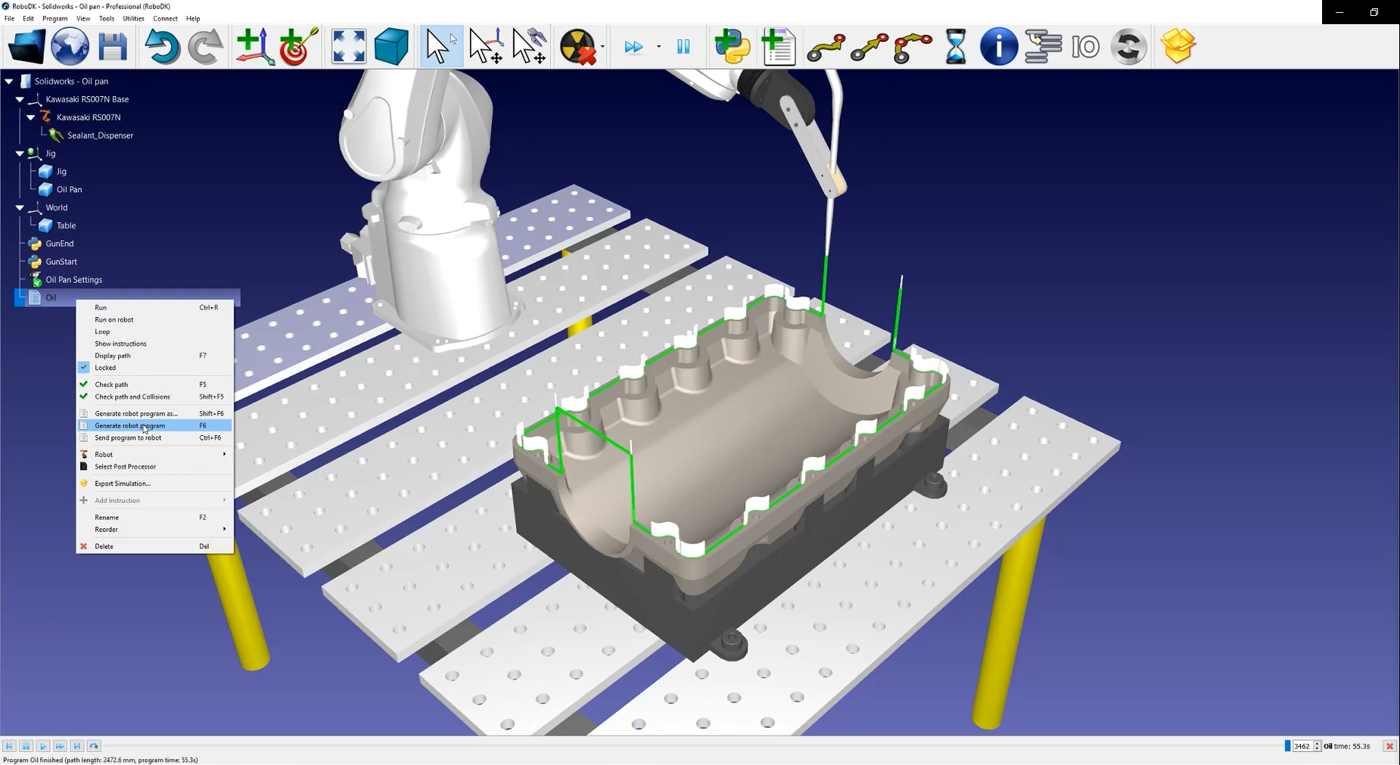
要生成机器人程序,请右键单击程序
最终生成.pg格式可执行文件,可直接导入控制器。