Laser Cutting
简介
本节将指导你在RoboDK中创建基础项目,实现机器人仿真与离线编程。本案例通过Fusion 360与RoboDK联合操作,完成对安川MH50-35机器人的激光切割应用仿真与程序编制。
提供两种编程方案:特征提取法或直接调用Fusion 360激光切割模块。
Video:Fusion 360机器人激光切割编程 https://youtu.be/MZcPXktyT8s。
通过RoboDK的Fusion 360插件,你可无缝导入三维模型至RoboDK环境。该插件支持直接编程50余个品牌、500多款工业机器人。
如果你拥有 RoboDK 许可证,Fusion 360 的 RoboDK 插件是免费的。
Tip:在RoboDK Add in for Fusion文档中,查看更多有关插件的信息。
激光切割示例
要启动该项目,首先要在默认资源库中选择 RoboDK 的激光切割示例。
设置工作站
本示例使用了Motoman MH50-35 机器人、激光切割头、冲压加工的金属片和激光切割台面。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
加载案例:
1.选择:文件 ➔
2.从RoboDK 的示例文件夹,找到激光切割示例:
C:/RoboDK/Examples/Plugin-Fusion-360-Laser-Cutting.rdk.
注意,工作站中的
导入工作站后,然后打开Fusion 360软件。
方法 1:特征提取
在Fusion 360中打开3D工件(本例为带孔冲压件)。
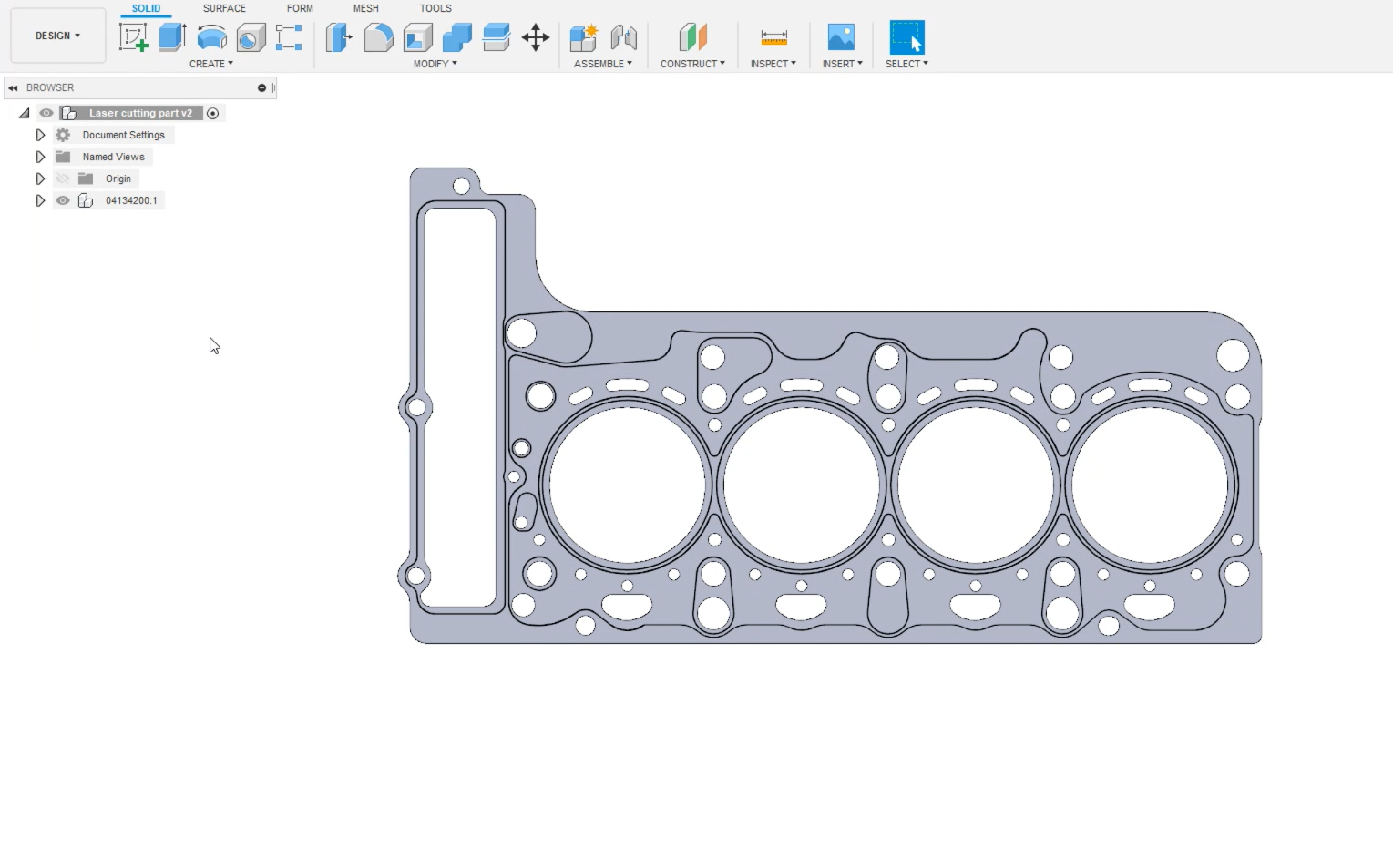
这个项目的目标是通过自动化编程实现所有孔洞的激光切割,避免手工编程耗时问题。
1.在Fusion中,选择左上角Design模板。
2.启用Tools选项卡中的RoboDK插件。
3.菜单栏中找到并点击
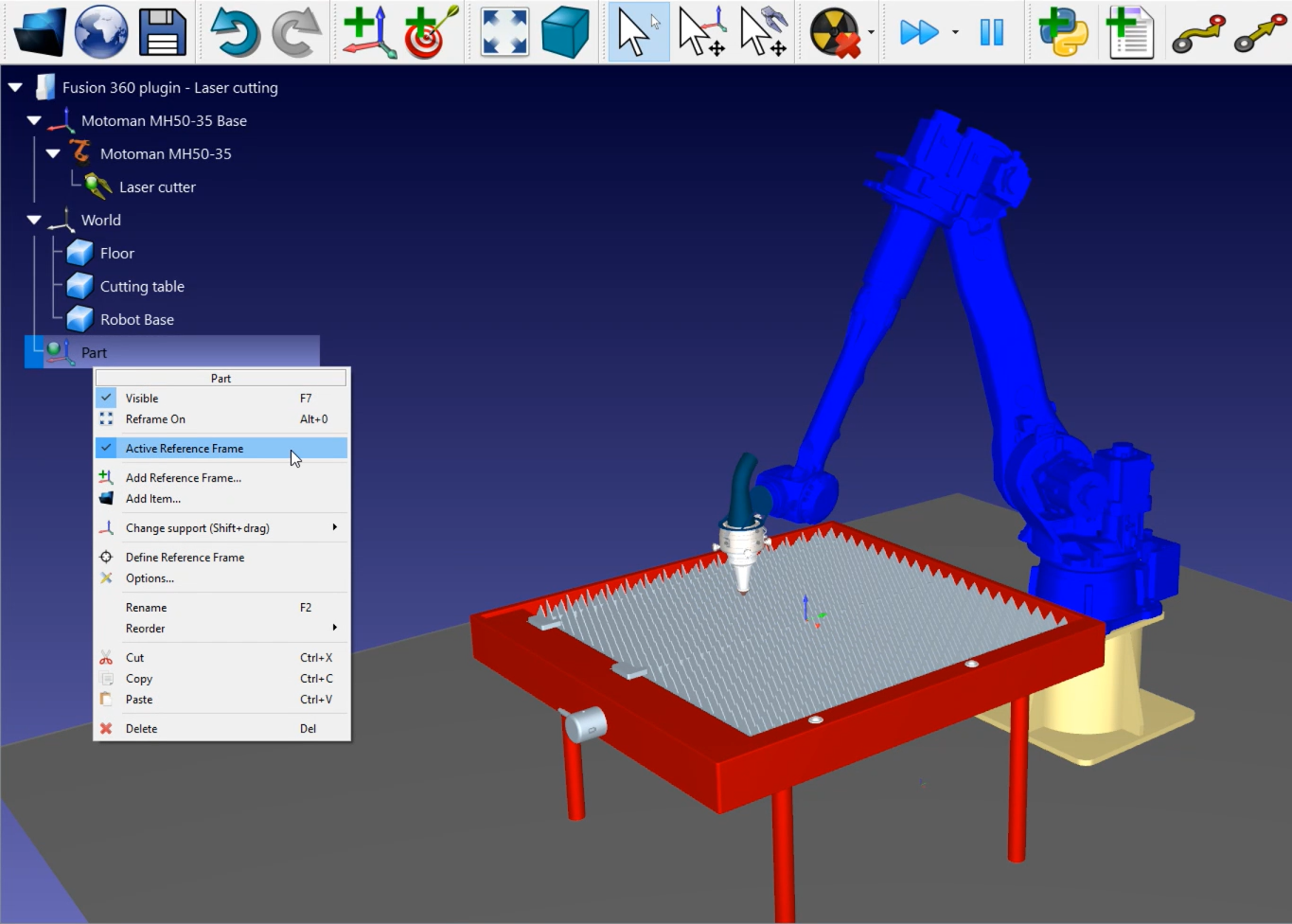
此时,工件已经导入到了RoboDK已激活的坐标系下方,你需要确认工件方位是对的,我们这个案例的话,工件的初始方位可能会调整。
Note:工件的方向由在 Fusion 360 中设计工件时的方向决定。
请按照以下步骤修改工件的方向:
1.双击
2.点击窗口中的更多选项。
3.如上图所示,有个移动几何模块,你需要在 X 轴(浅蓝色)输入:90。
4.点击:执行移动,保存该方向。
RoboDK插件在Fusion 360 中还有另一项功能,路径导入进阶设置:
1.返回Fusion 360。
2.在 RoboDK选项卡选择:Load Curve(s)。
3.在打开的菜单中:点击Curve旁的Select。
4.那么我们需要在下图中,鼠标点击在四大圆孔边缘完成选取。
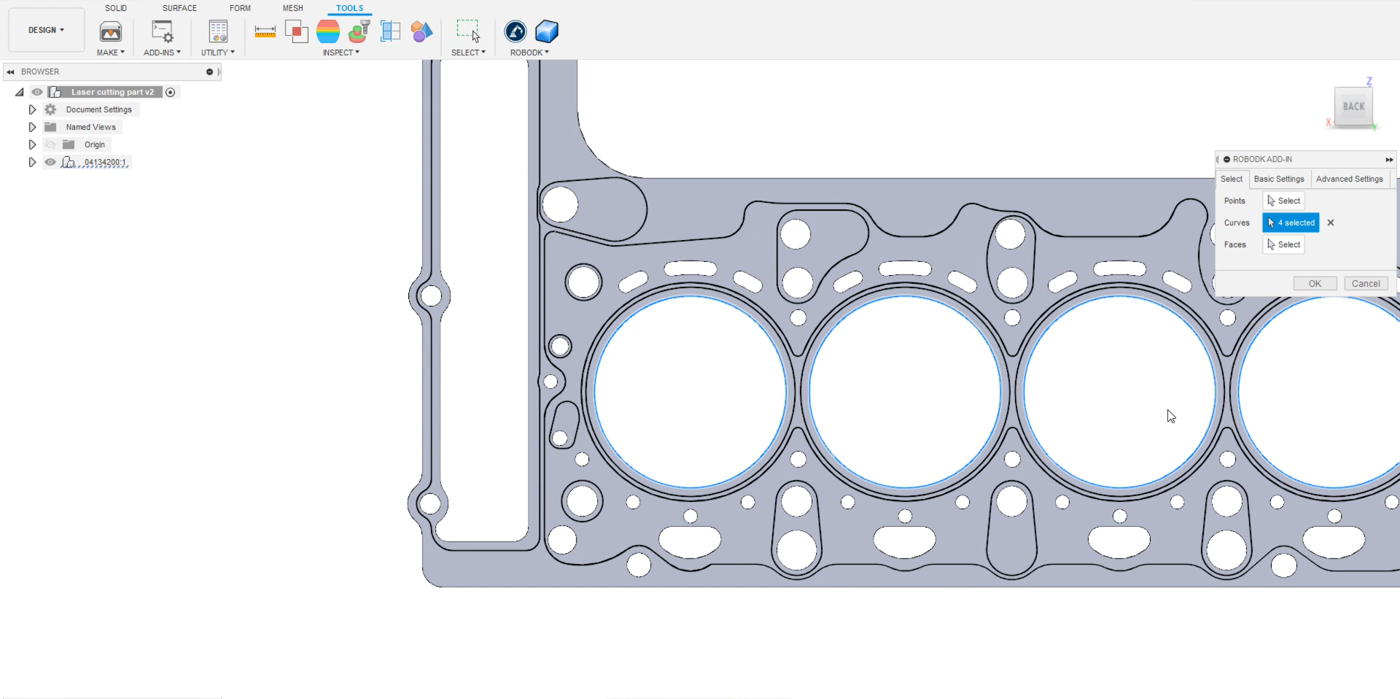
现在,你需要为 RoboDK 指定机器人工具的方向。
1.在Fusion的菜单中:点击Faces旁的Select。
2.那么我们需要在下图中,选取圆圈周边的区域。
现在,你可以对设置进行配置:
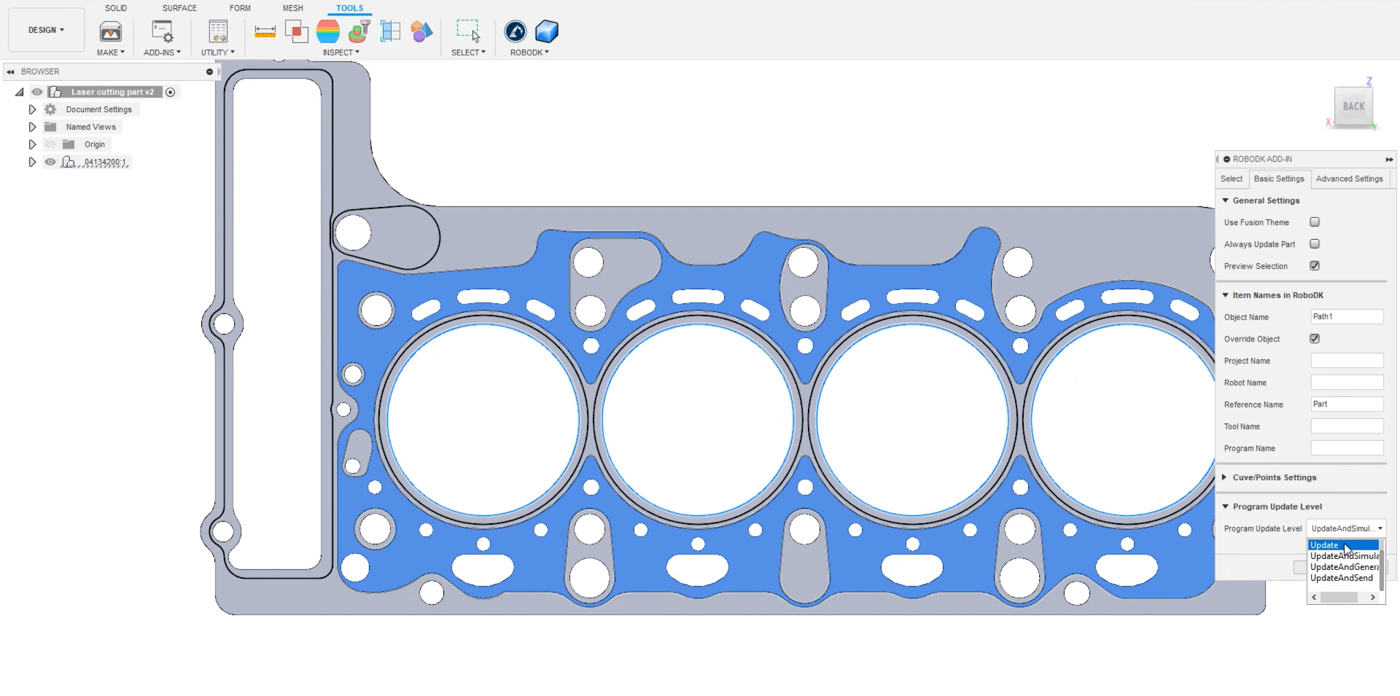
1.在刚刚打开的同一菜单中选择选项卡:Basic Settings。
2.如果你希望保留 RoboDK 的默认行为,取消选框:Use Fusion Theme。
3.需要命名一个路径名称,那么我们可以在Object Name命名。在本例中命名为:Path 1。
4.输入你希望导出的Reference Name。在本例中,它被命名为:Part,与 RoboDK 工作站中的名称相同。
5.在Program Update Level中选择:Update,如上图所示,这是可选项。
6.点击OK,完成保存。
Note:在选项卡:Advanced Settings,你可以找到Linear Tolerance,它的作用是控制发送到 RoboDK 的点数。路径点越密集,加工精度越高。
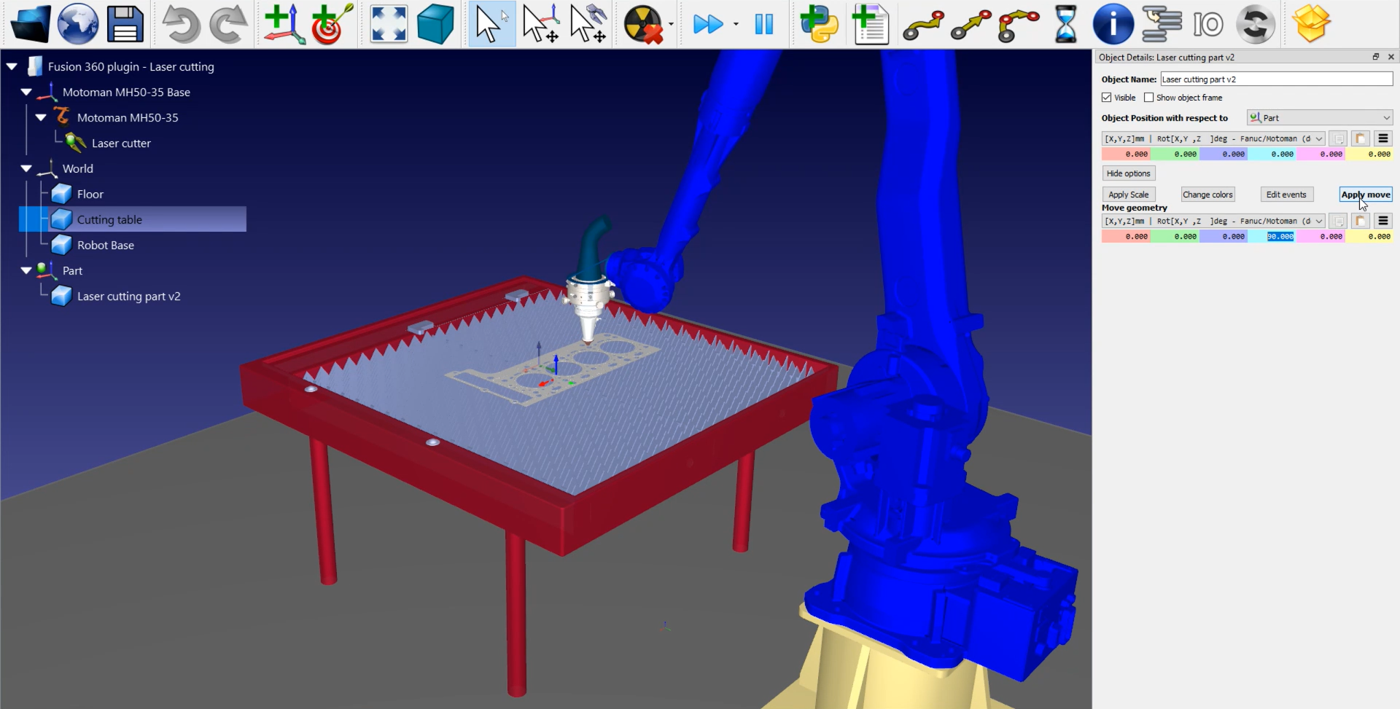
现在返回RoboDK ,你应该可以在 RoboDK 中看到导入的路径了。在此示例中,可能会再次出现方向问题,你需要像之前修改工件一样修改方向。
1.双击
2.选择物体详情菜单中:更多选项。
3.到移动几位位置,在 X 轴(浅蓝色)上输入 90。
4.单击执行移动,保存方向。
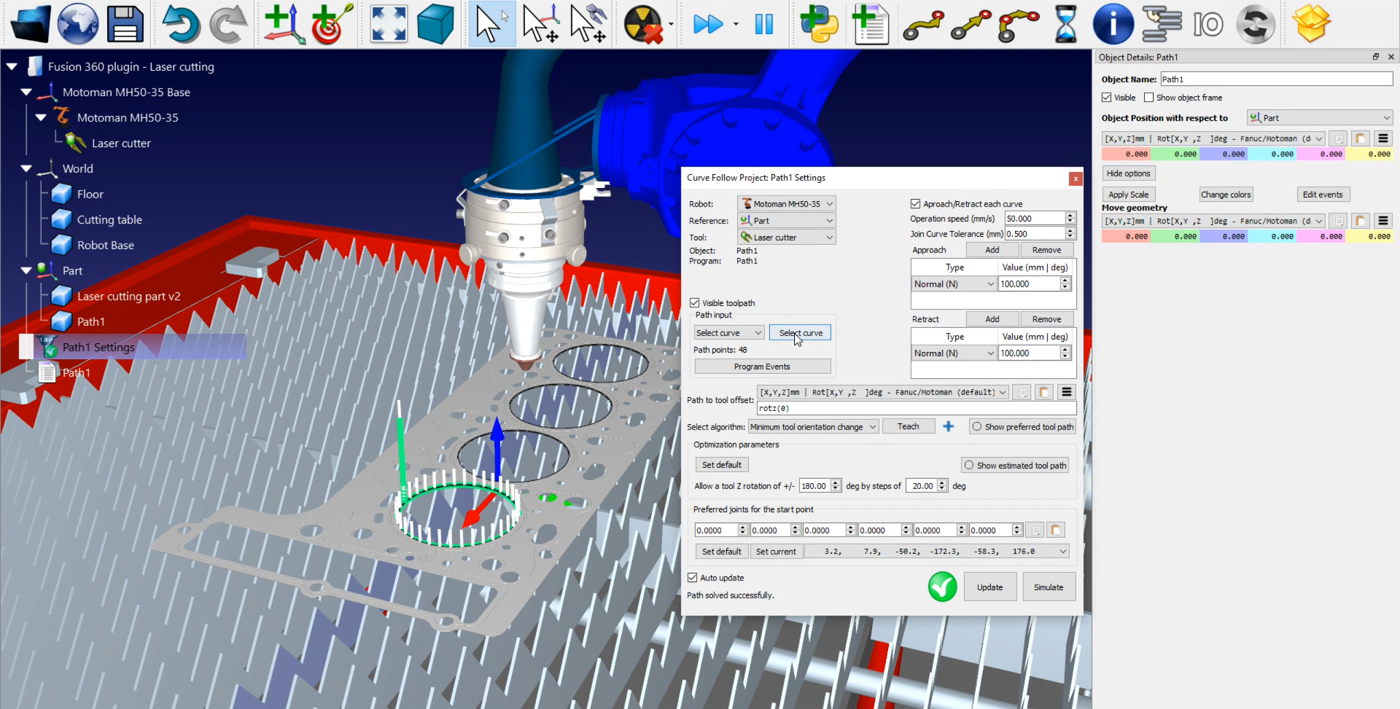
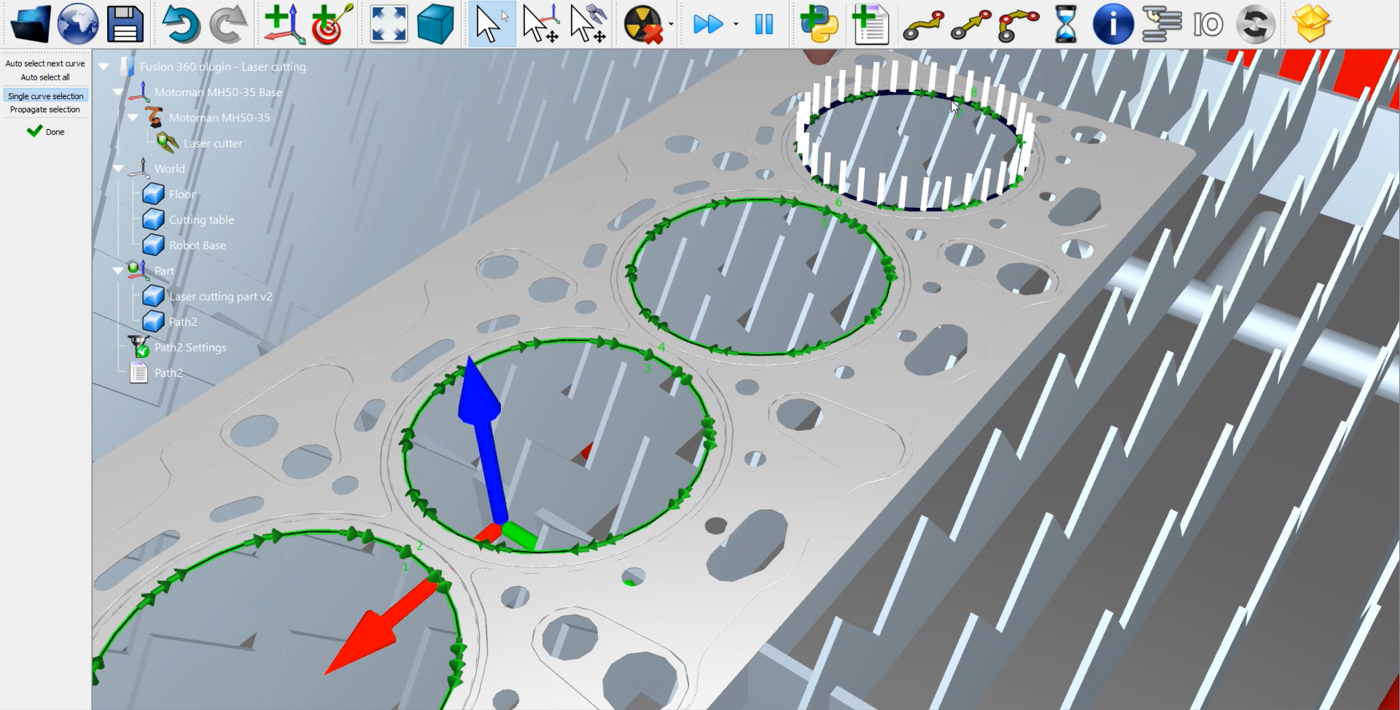
下一步是通过选择
1.双击曲线跟踪项目:
2.你需要在窗口中检查机器人、参照物和工具是我们需要的对象。
3.点击:选择曲线。
4.选择剩余的3个圆圈。
5.最后在界面的左侧栏,单击
Note:你可以通过右键单击路径并选择反转方向,即可切换路径的方向。
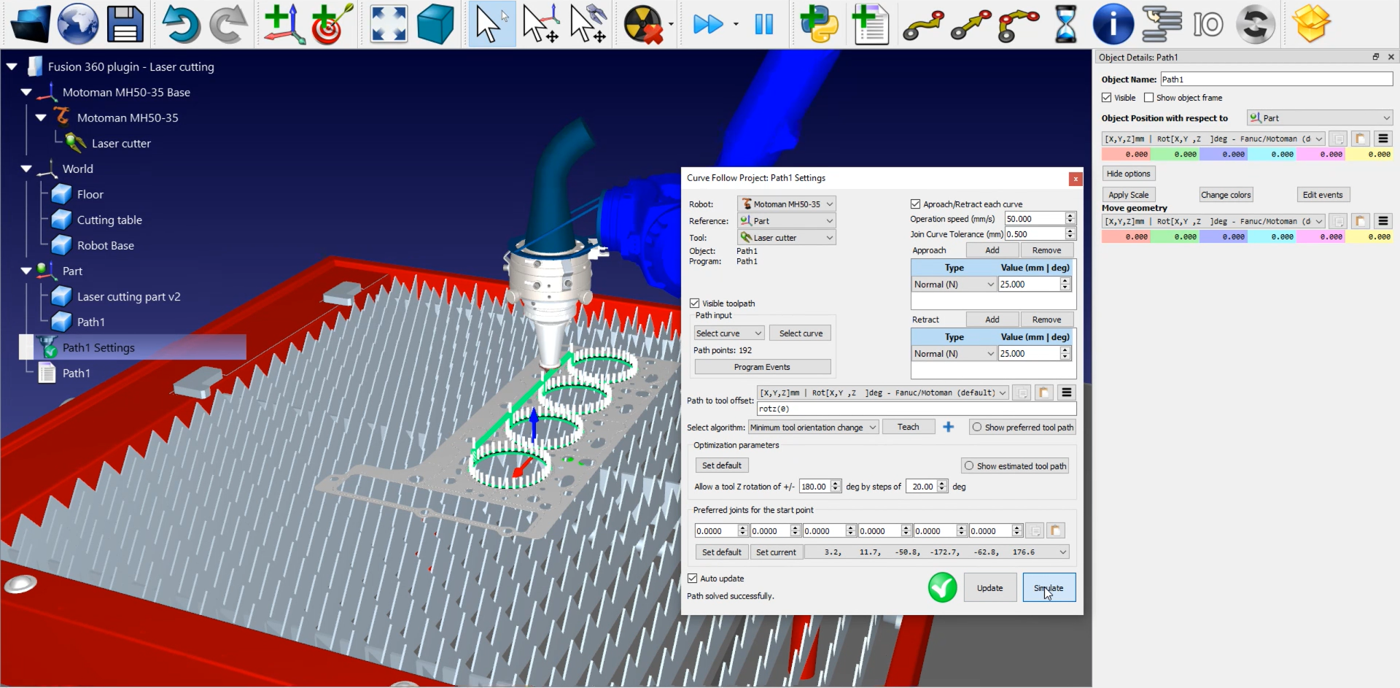
或许你会发现路径中趋近和撤回都过于长了。
那么我们可以这样修改这个距离:
1.双击
2.调整趋近和退出模块里的数值,本例中,我们输入 25mm。
3.最后点击更新➔ 模拟即可。
在这个例子中,激光会切割出太多材料,所以我们需要考虑激光的半径。
我们这样来设置激光半径:
1.返回Fusion 360。
2.进入选项卡:Solid,然后点击菜单栏的创建Sketch.
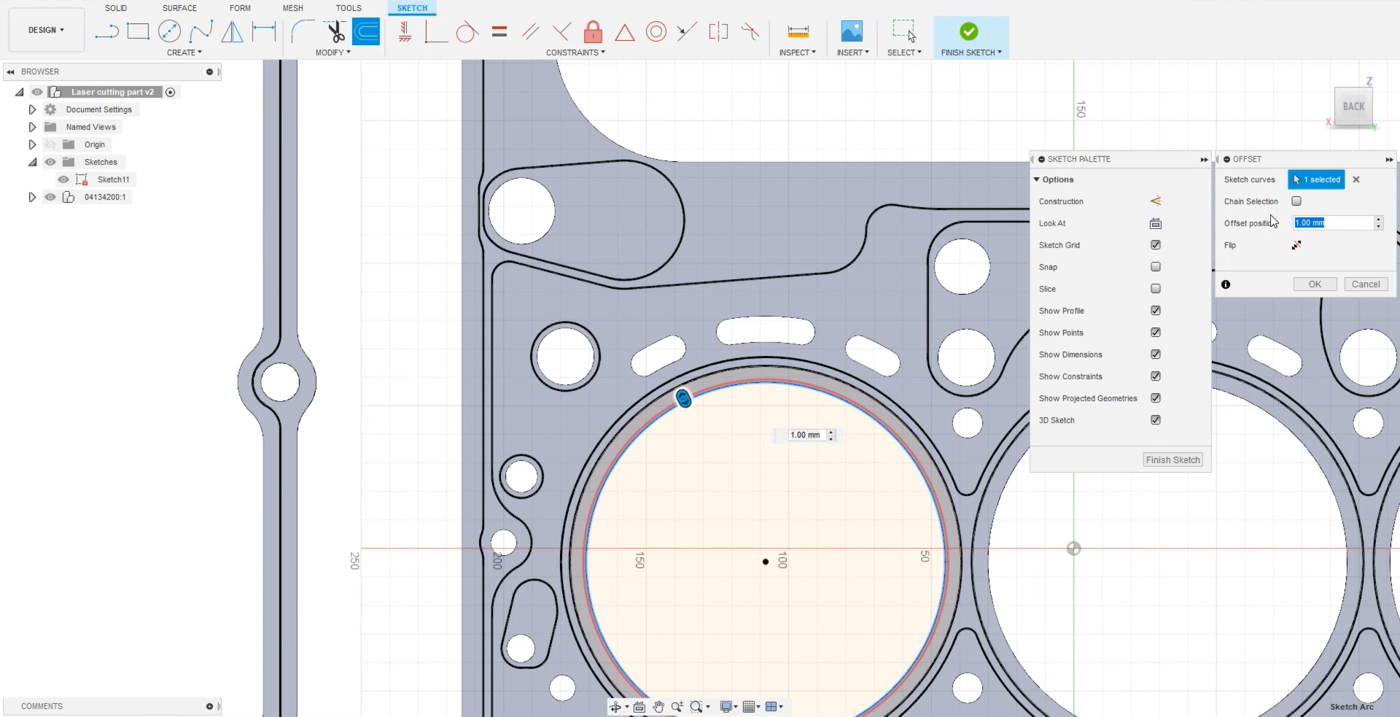
3.然后在Sketch下方选择一个圆,点击顶部菜单中的Offset按钮,创建新路径。
4.我们需要知道激光束直径为 2 毫米,半径将为1 毫米。如下图所示,在Offset position输入: 1。
5.那么剩余3 个圆也需要重复上述步骤。
6.单击OK完成设置。
现在你可以将新做好的曲线同步到RoboDK。
1.在Fusion中,点击Tools选项卡。
2.单击RoboDK➔ Load Curves。
3.点击Curves旁的Select,选取每个圆中的线。
4.点击Faces旁的Select,选取圆附近的面。
5.在本例中,Object Name设置: Path 2。
6.点击OK,这样路径同步到RoboDK。
如上所述,你可以修改路径 2 的方向。如果走近一些,就能看到两条路径的不同之处。现在你可以删除路径 1。
下一步是验证加载的路径部分是否正确:
1.选择
2.单击选择曲线,然后选择其他圆,如下图所示。
3.选择
如上所述,你可以调小趋近和退回的数值。在本例中,你可以再次输入:25。然后更新➔ 模拟曲线追踪项目以保存设置。你可以对该部件的所有其他孔采取相同的步骤。
这种构建激光切割程序的方法适用于 RoboDK 的 Fusion 360 插件,同时也适用于其他 CAD 插件。
方法 2:Fusion 360激光切割功能
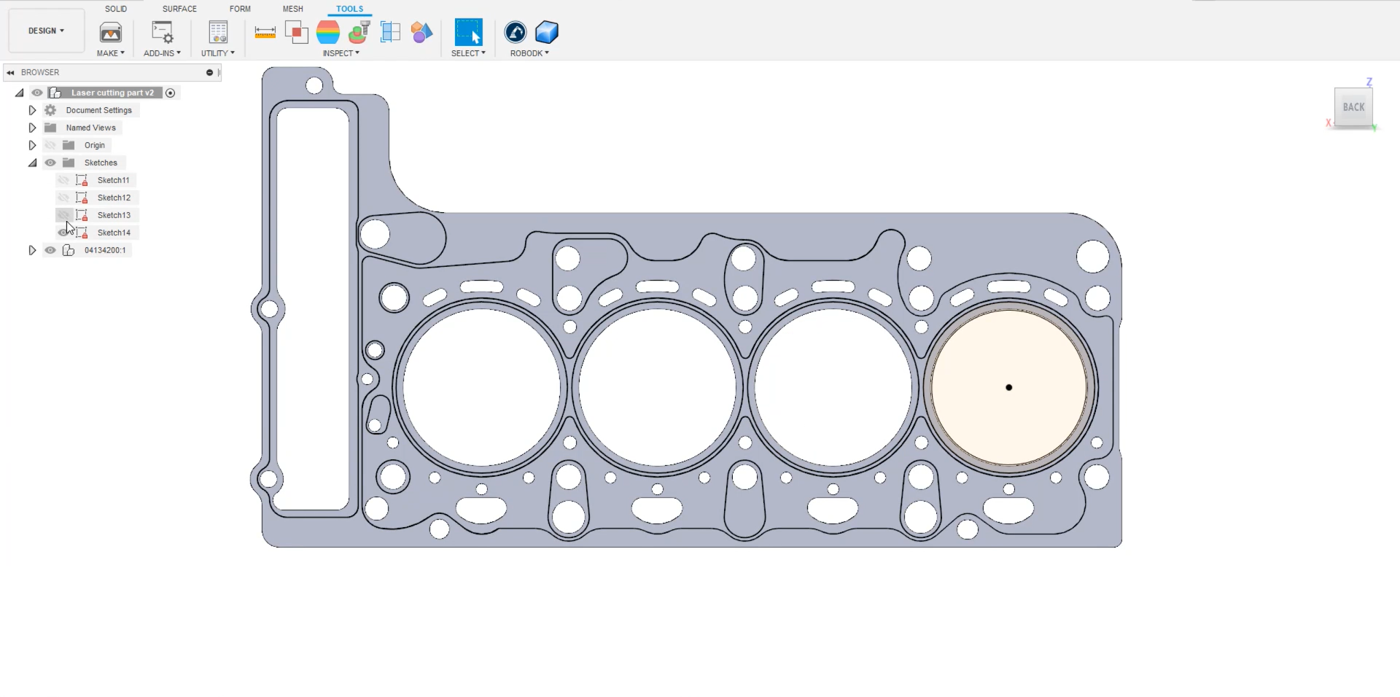
要使用 Fusion 360 激光切割功能,需要返回Fusion 并隐藏之前绘制的草图,如下图所示。
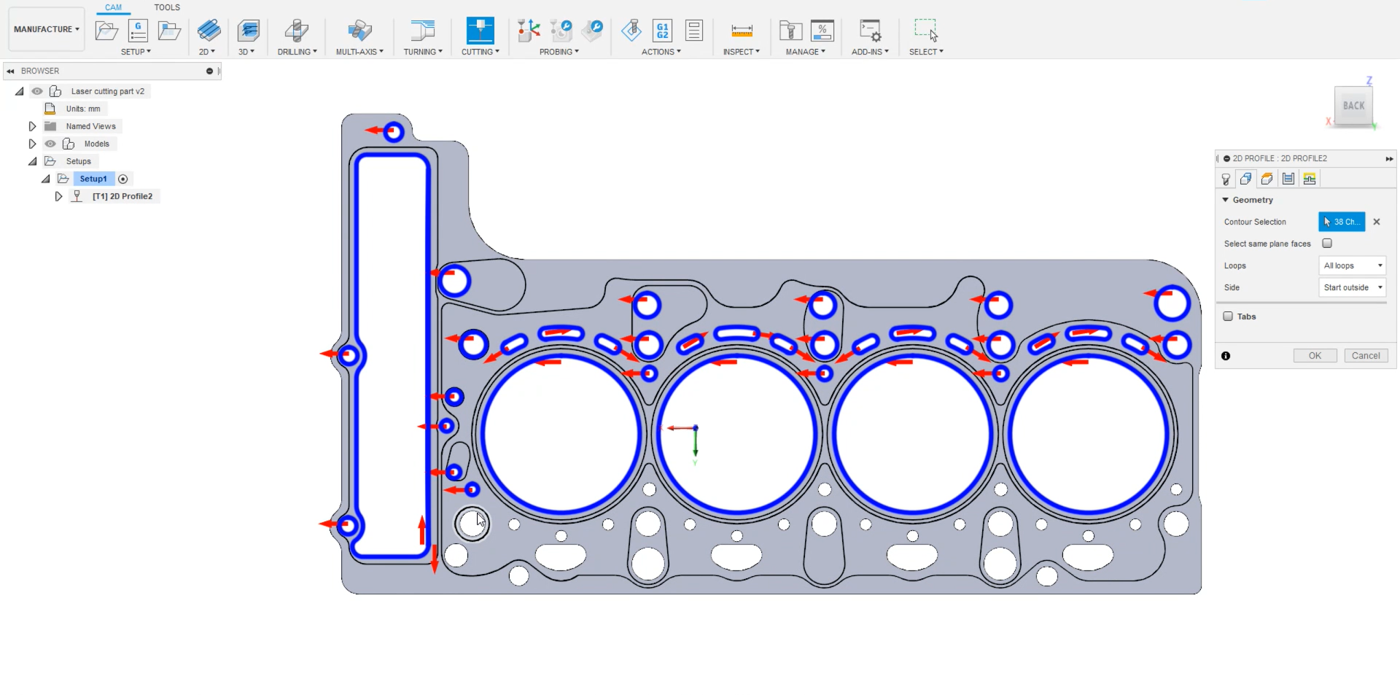
从左上角菜单的Design板块切换到Manufacture区域。在工具栏中点击2D切割功能。
1.选择:Tools。在本例中,它是一个 1 毫米宽的刀具。
2.转到同一菜单中的Geometry 选项卡,选择要切割的圆。在本例中,冲压加工金属片的所有孔都被选中,如下图所示。
3.单击OK完成设置。
Note:确保切割在路径的右侧。
右键单击路径并选择模拟,即可在 Fusion 360 中模拟路径。在Setup中,确保使用与模型相同的原点。这样,它就会在正确的位置输出。
1.右键单击Setup1➔ Edit。
2.确保在Origin中选择了Model origin。
3.选择OK完成设置。
现在,你可以在Fusion 360 标签中选择:Tools➔Load CAM project in RoboDK,将草图同步到RoboDK。
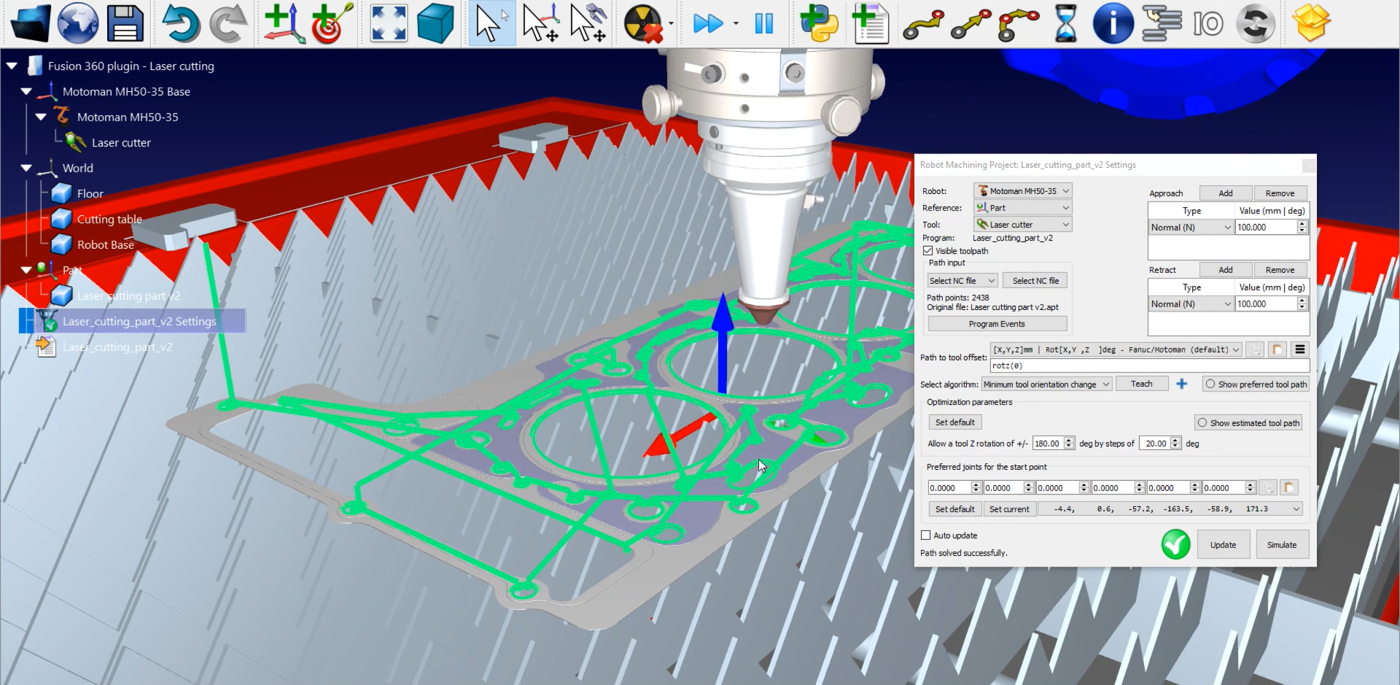
你应该可以在 RoboDK 中看到导入的草图。确保删除之前的路径,本例中为Path 2。双击Laser cutting part v2 Settings,打开机器加工项目。你已经可以看到工件顶部的绿色路径。单击:更新➔ 模拟验证路径。
Note:你可以通过右键单击
唯一需要管理的程序事件:
1.打开程序事件窗口。
2.让前三个文本框自由发挥,因为你不是在做一个有主轴、多个工具或需要达到某个特定转速的机器加工项目。
3.选中路径开始前,写入:LaserOn,以便仅在路径开始时激活激光
4.选中完成路径,写入LaserOff, 以在路径结束时停用。
5.单击确定,并在项目中点击更新。
要生成机器人程序,请右键单击
现在可以将 .pg 文件传输到机器人控制器。