创建目标
请按照以下步骤在 RoboDK 中为取放作业创建目标点。
7.添加目标:
a.将机器人移动到拾取位置。
b.选择程序 → 示教目标点,保存位置。
c.重复接近、拾取、放置和撤回的位置。
8.整理目标:
a.为清晰起见,重新命名目标(如 Approach_Pick、Pick、Place)。按 F2 键重新命名目标。
b.不要忘记在测站树中的相关参考坐标系下创建目标。
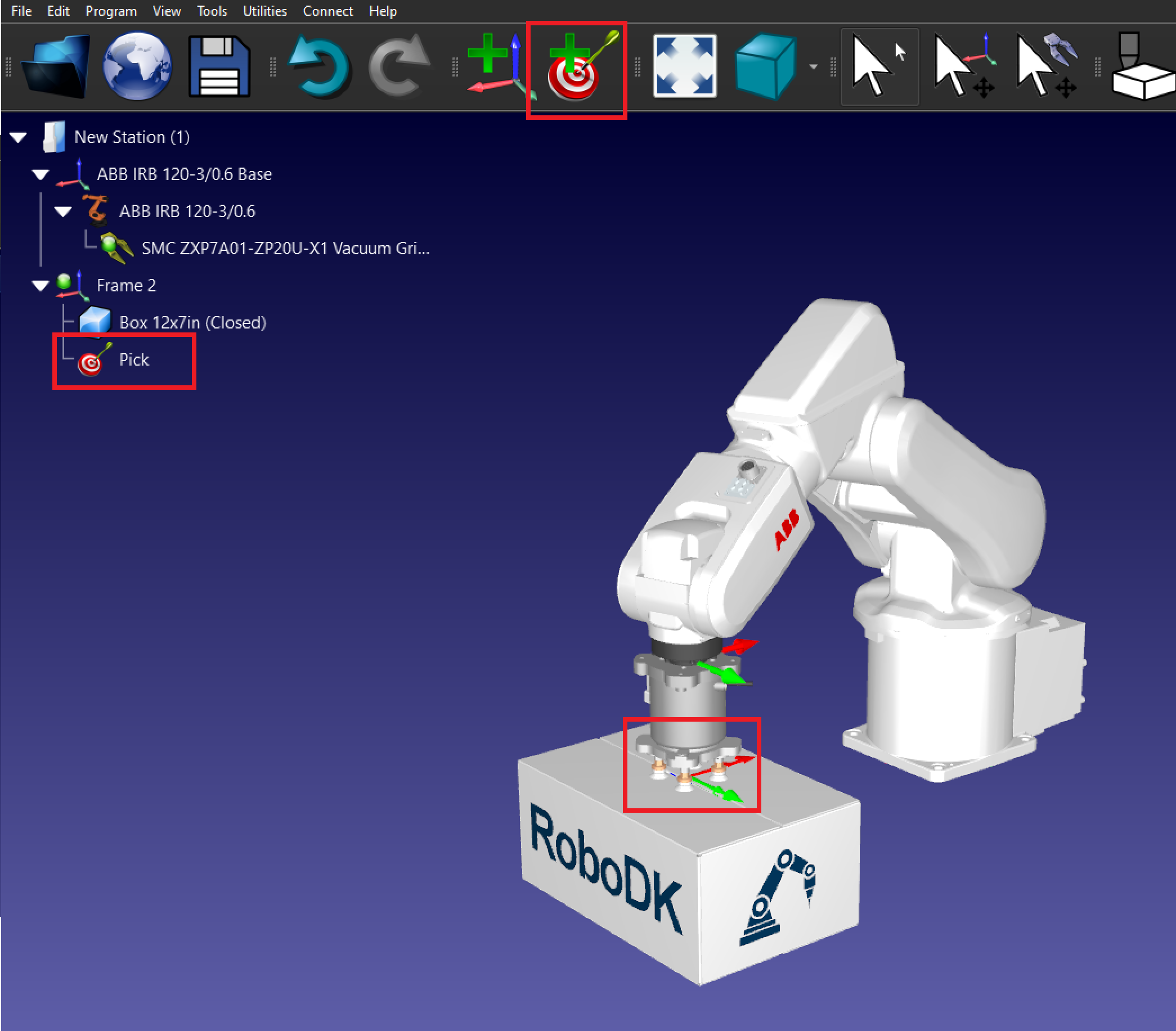
9.创建拾取目标:将机器人放在箱正上方,添加目标,然后重命名为Pick。
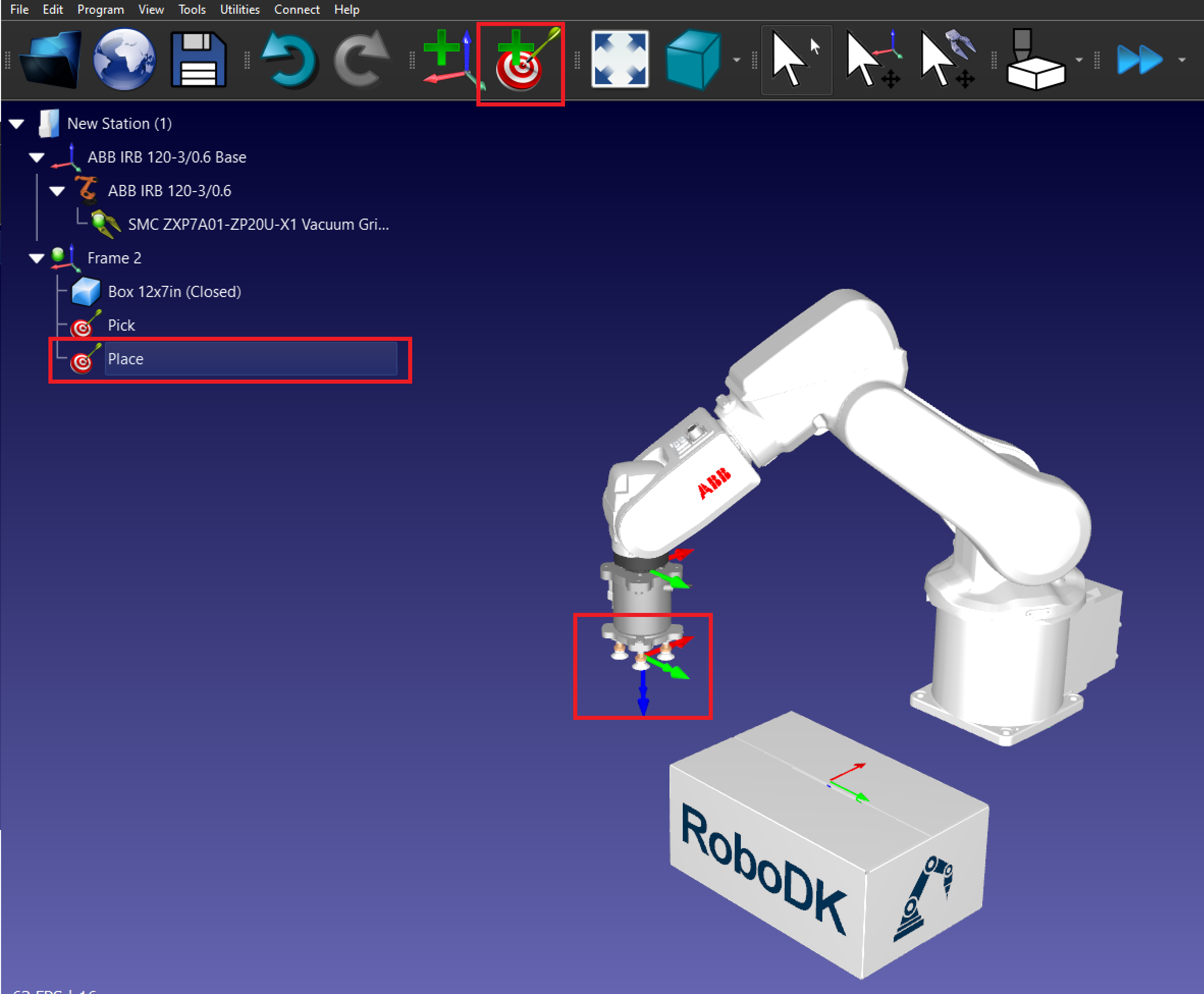
10.创建放置目标:将机器人放在其他上方,添加目标,然后重命名为Place。
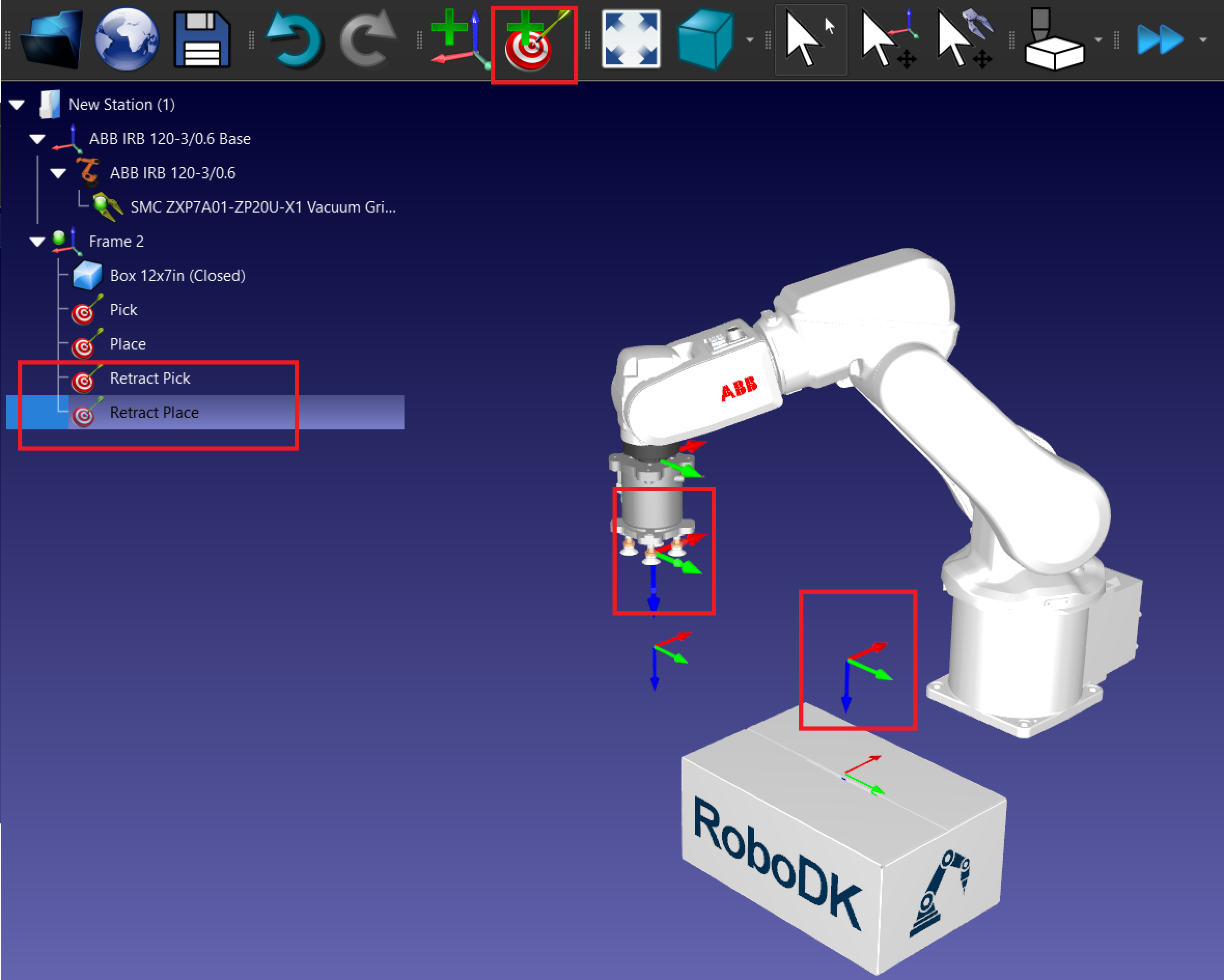
11.创建回撤目标:
a.将机器人移至拾取目标,并沿 Z 轴向上移动。
b.创建一个名为 "Pick Retract "的新目标。
c.再到Place上方创建一个Place Retract的目标。