取放案例
本章节的案例有:
1.一个简单的取放案例,机器人拾取一个零件,然后将其放置在其他地方。
2.一个带有组装操作的取放案例。
3.一个使用托盘码垛插件的取放案例。
4.一个通过API接口完成的取放案例。
Tip:你可以在RoboDK在线资源库中找到更多取放和物料处理项目案例。
简单取放案例
本节展示了一个简单的取放案例,使用带有真空夹爪的机械臂移动一个箱子。
Tip:按照入门指南熟悉如何在 RoboDK 中从零开始创建新项目。
请按照以下步骤创建取放案例:
创建一个新的 RoboDK 工作站
这些步骤将向你展示如何在 RoboDK 中为拾取和放置应用创建一个新项目(也称为工作站)。
1.打开 RoboDK:在计算机上启动 RoboDK 应用程序。
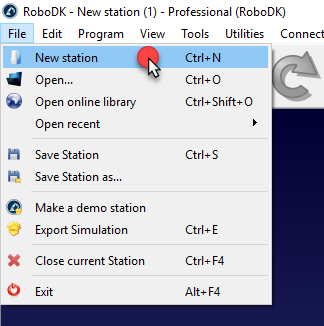
2.创建新工作站从RoboDK 的主菜单中选择:文件-新建工作站-新的空白工作站将被创建为你的工作区。
3.从资源库中插件机器人
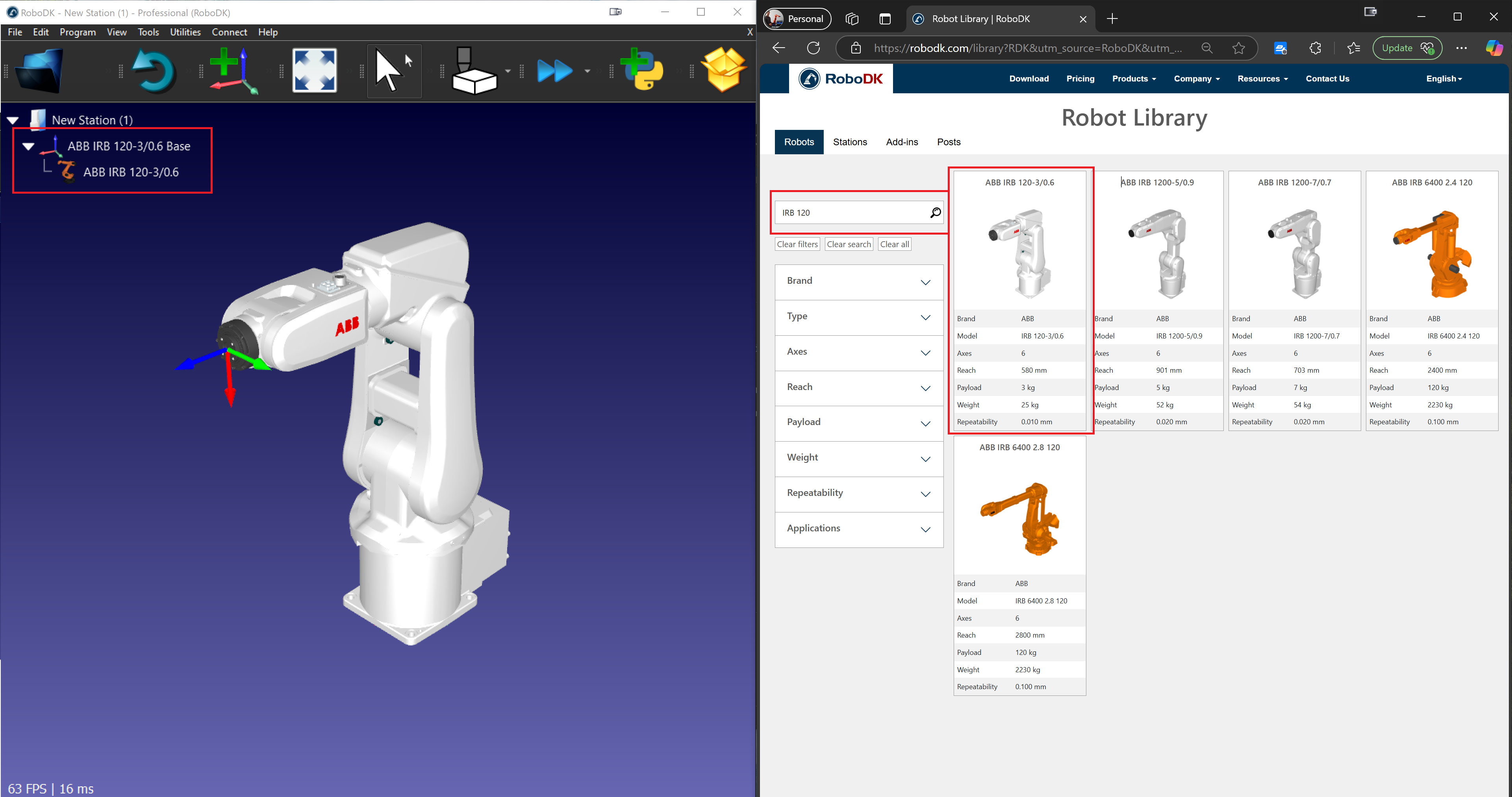
a.打开RoboDK在线资源库下载机器人
i.在主菜单中选择文件 → 打开机器人库。
ii.将弹出一个RoboDK 资源库的网页,显示各种工业机器人。
b.选择并导入机器人:
i.使用搜索栏查找适合拾放任务的机器人(如 UR10、ABB IRB 120、Fanuc LR Mate)。
ii.点击所需的机器人,然后选择:Open。
c.将机器人放置在站内:
i.机器人将自动出现在站内。
ii.如有必要,可使用 "移动工具 "调整其位置。
4.添加参考坐标系插件
a.创建参考坐标系:
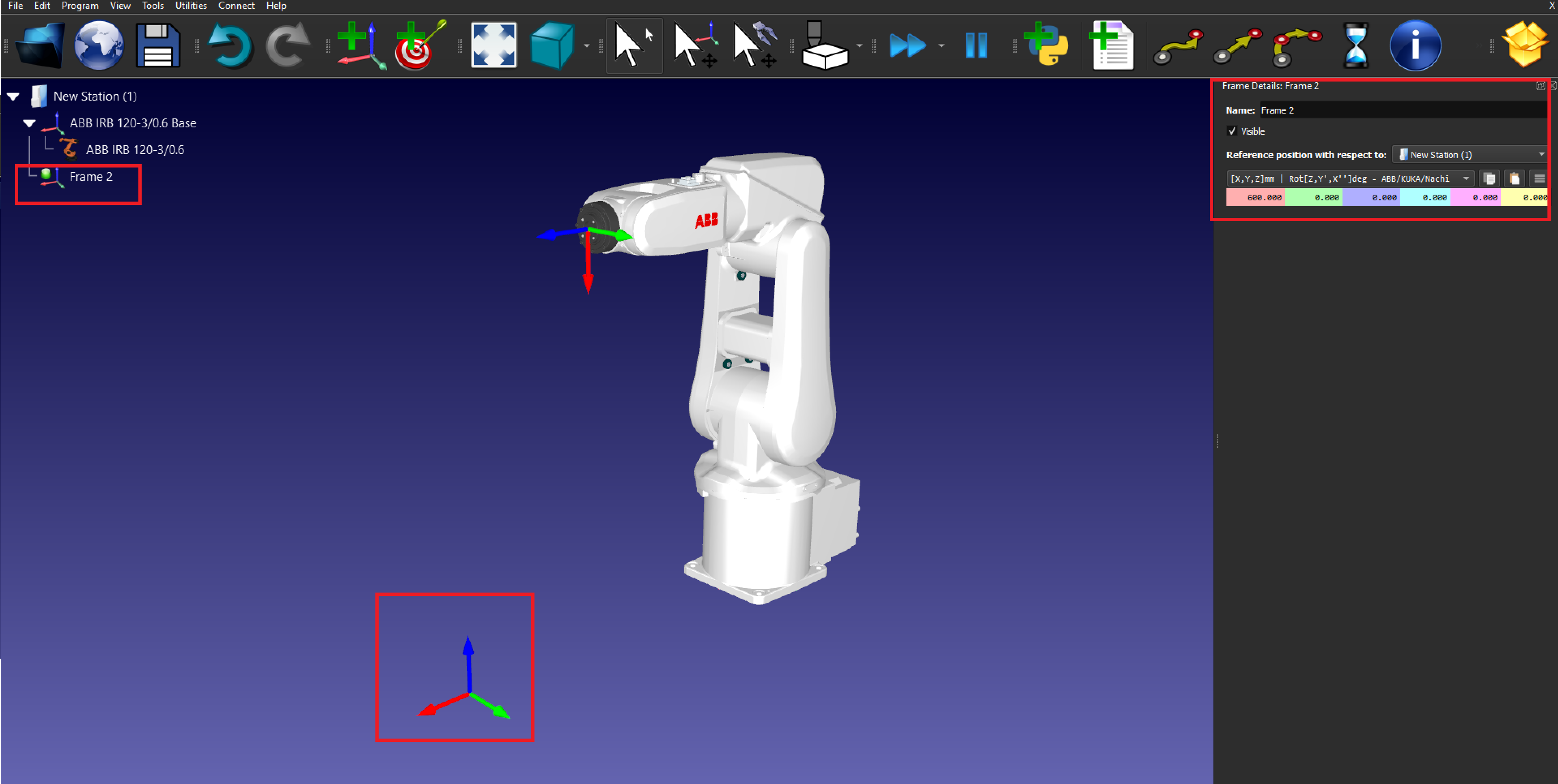
i.选择程序 → 添加参考坐标系。
ii.新的参考坐标系将出现在工作站的数和 3D 视图中。
b.定位参考坐标系:
i.双击参考坐标系,输入坐标(X、Y、Z)和旋转值。
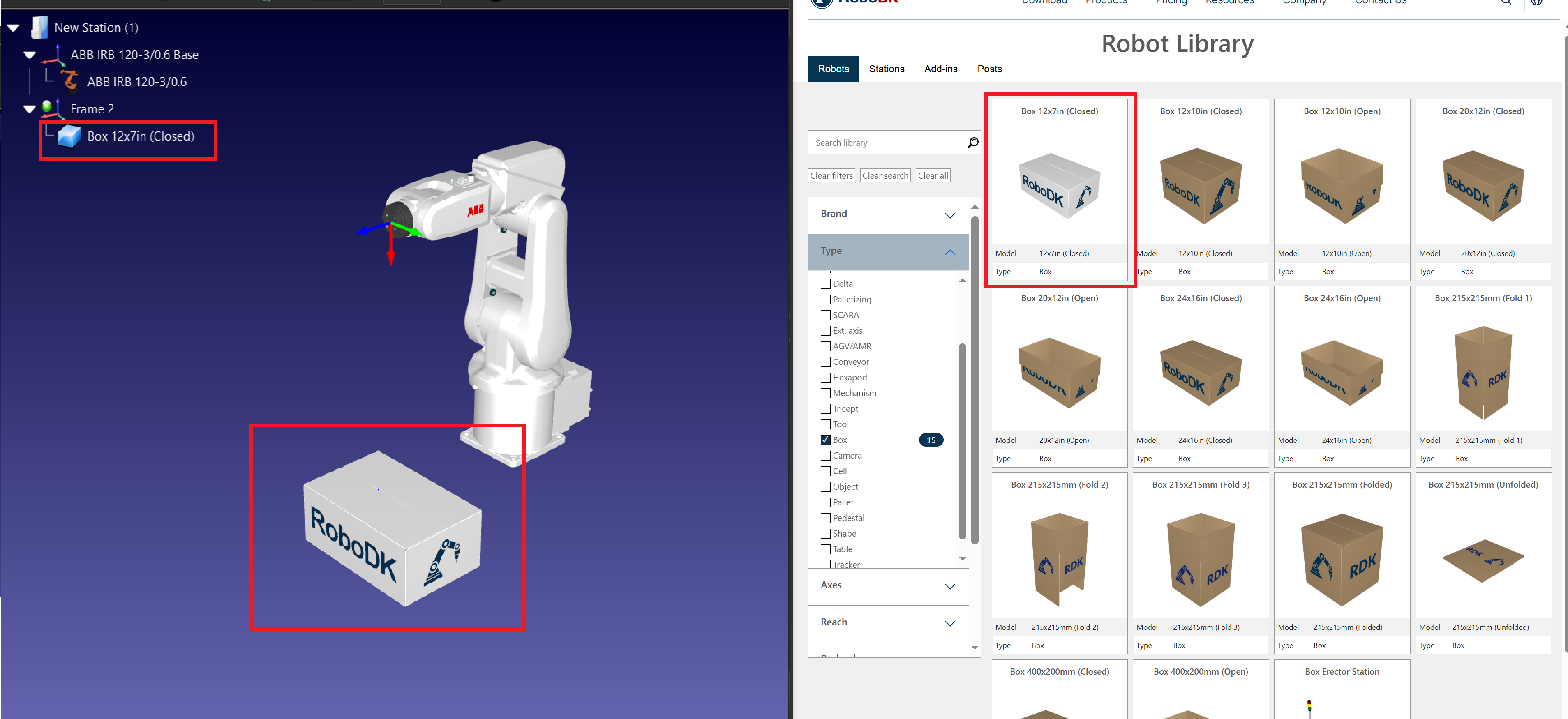
5.导入 3D 物体
a.导入物体模型:
ii.在主菜单中选择文件 → 打开。
iii.选择要拾取和放置的物体 3D 模型(如 STEP、IGES 文件)。
b.定位物体:
iv.使用 "移动工具 "调整物体在参考坐标系中的位置。
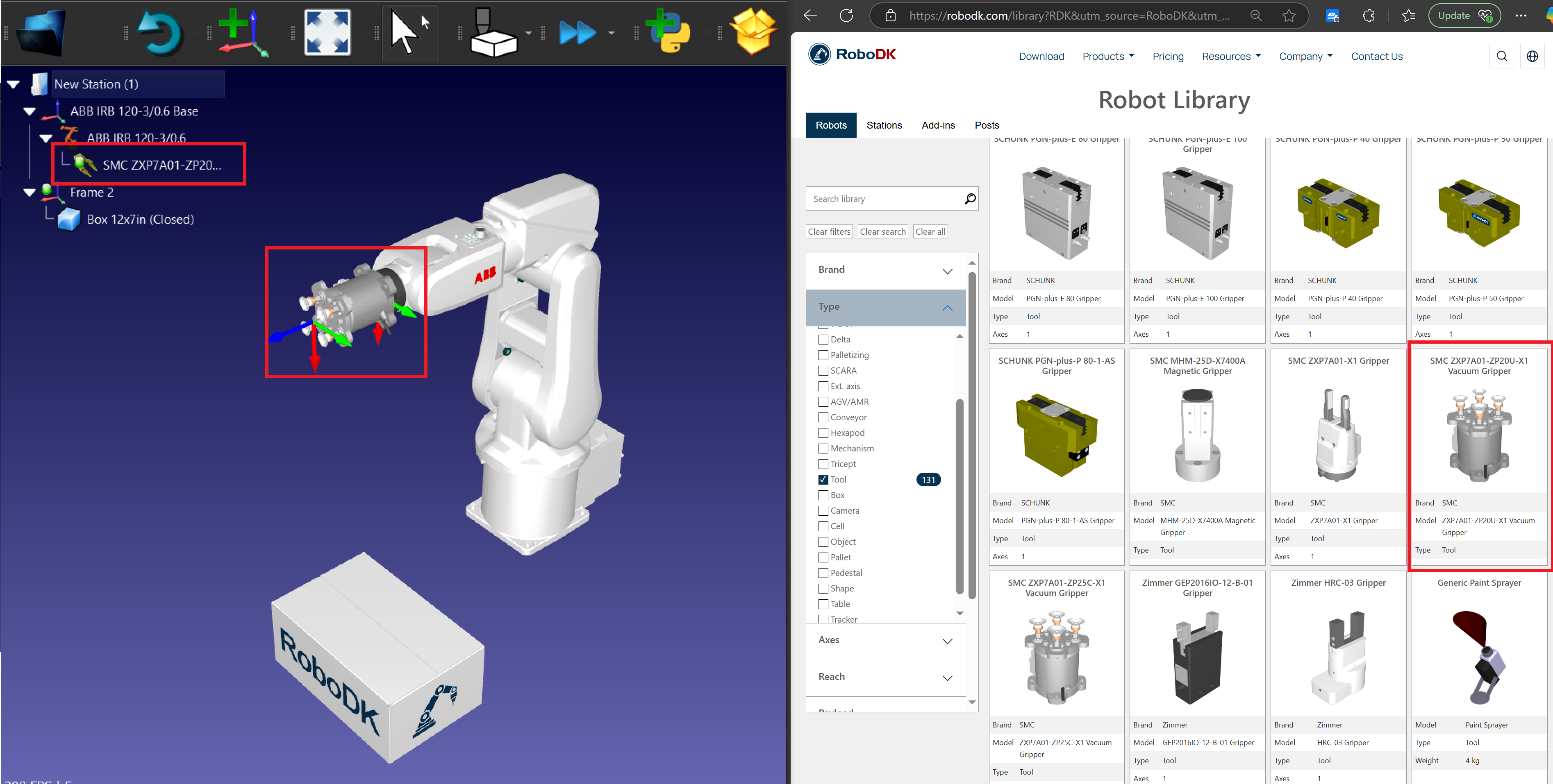
6.添加一个工具(夹爪)
a.选择夹爪:
i.在主菜单中选择程序 → 添加工具 (TCP)。
ii.从RoboDK在线资源库中选择夹爪,或导入自定义夹爪文件。
b.将工具安装到机器人上:
i.右键单击工作站树中的夹爪,选择 "附加到机器人"。
ii.选择合适的机器人法兰。
c.定义 TCP(工具中心点):双击工具,输入相对于机器人法兰的 TCP 坐标。
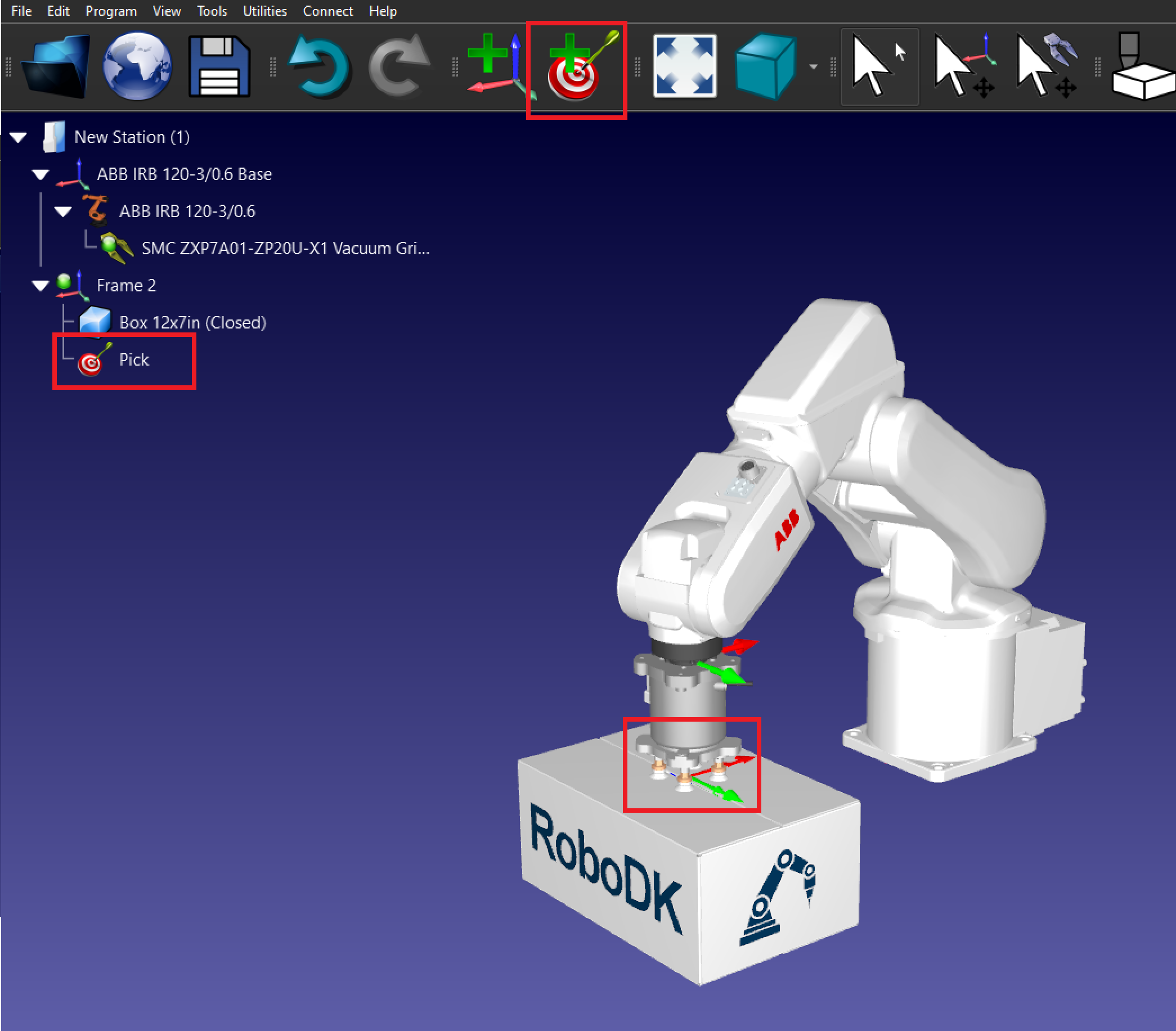
创建目标 for Pick and Place
请按照以下步骤在 RoboDK 中为取放作业创建目标点。
7.添加目标:
a.将机器人移动到拾取位置。
b.选择程序 → 示教目标点,保存位置。
c.重复接近、拾取、放置和撤回的位置。
8.整理目标:
a.为清晰起见,重新命名目标(如 Approach_Pick、Pick、Place)。按 F2 键重新命名目标。
b.不要忘记在测站树中的相关参考坐标系下创建目标。
9.创建拾取目标:将机器人放在箱正上方,添加目标,然后重命名为Pick。
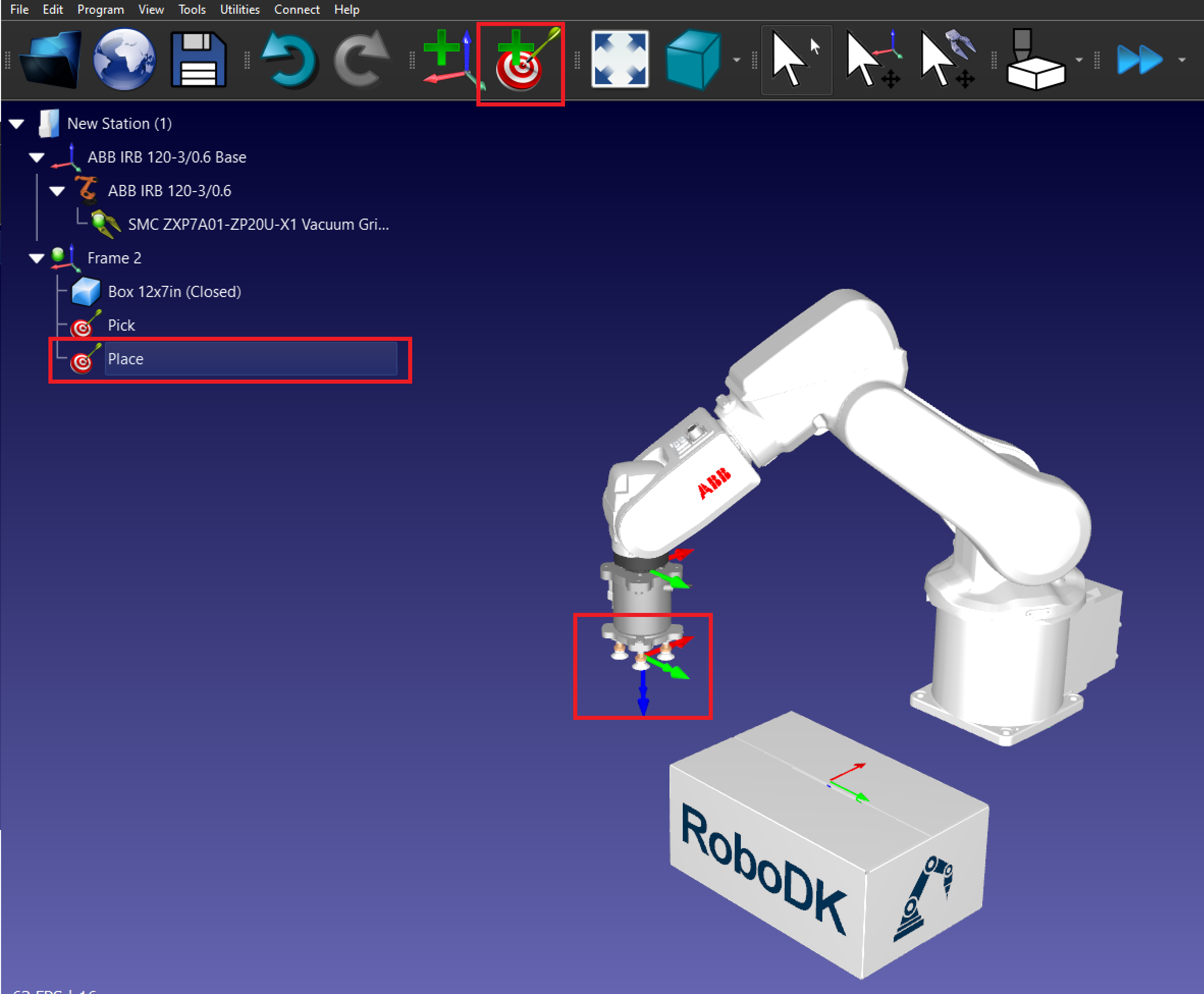
10.创建放置目标:将机器人放在其他上方,添加目标,然后重命名为Place。
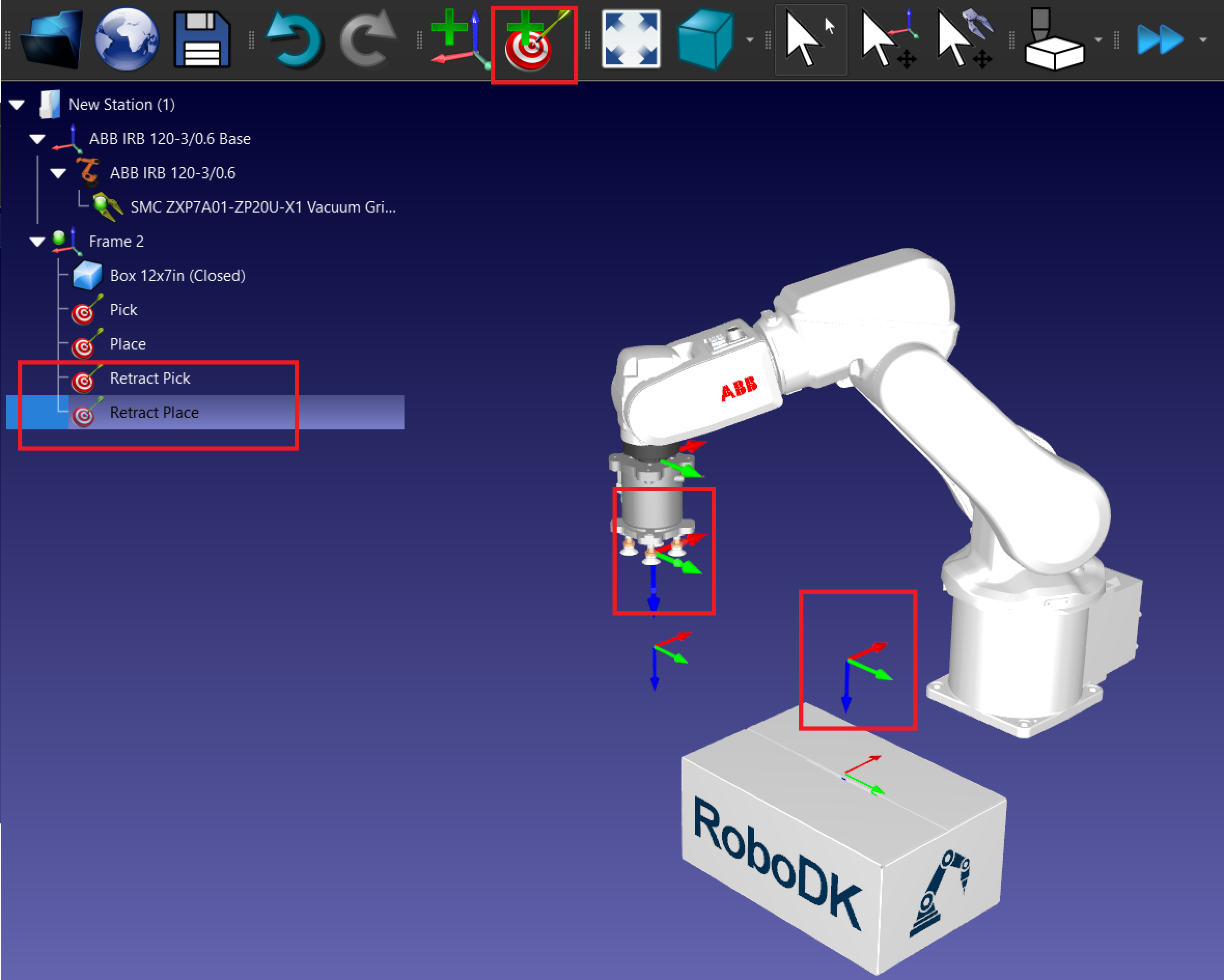
11.创建回撤目标:
a.将机器人移至拾取目标,并沿 Z 轴向上移动。
b.创建一个名为 "Pick Retract "的新目标。
c.再到Place上方创建一个Place Retract的目标。
创建取放程序
请按照以下步骤在 RoboDK 中创建一个基本的取放程序:使用真空夹爪的六轴机器人手臂移动一个箱。
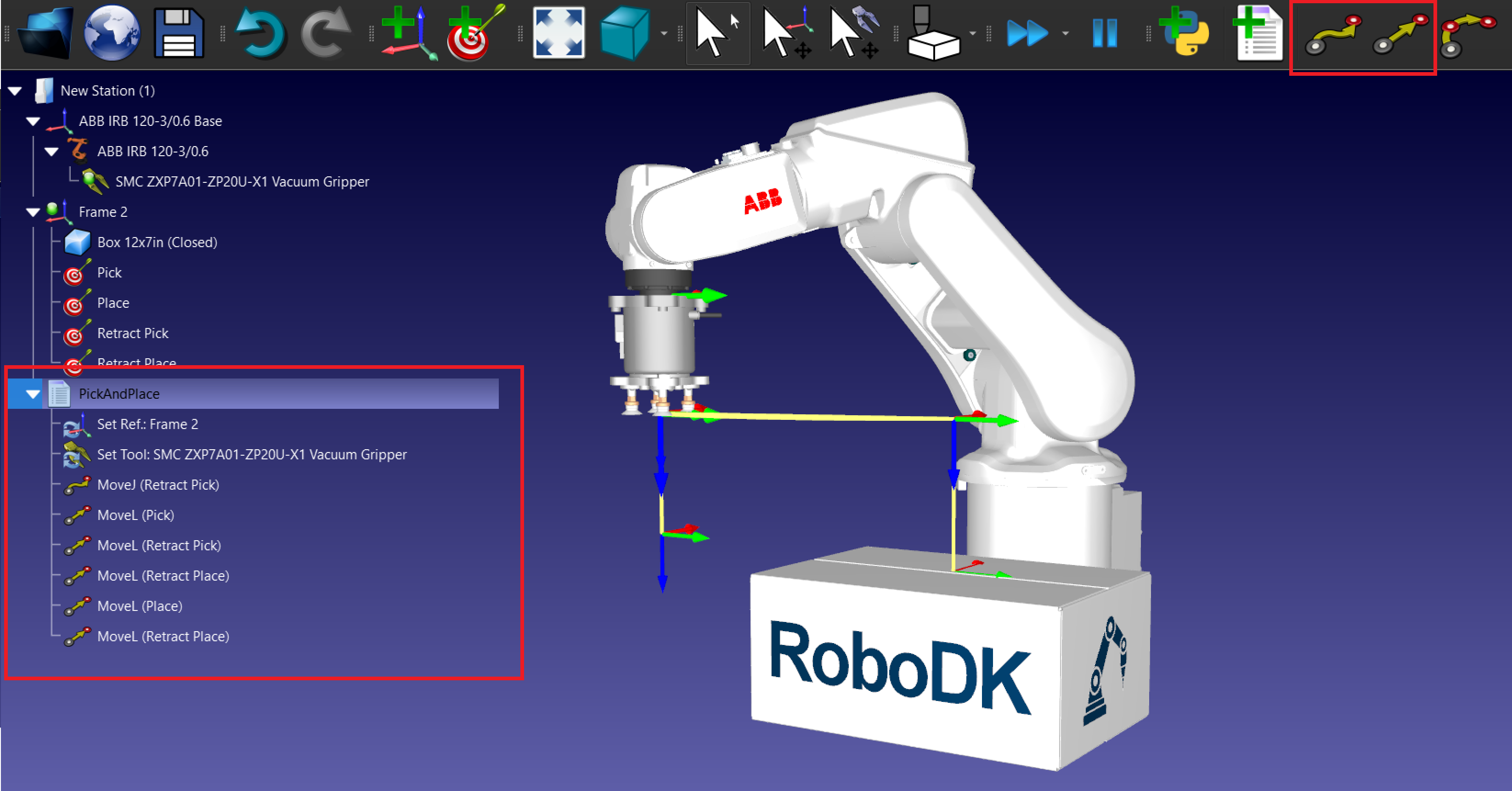
1.创建取放编程:
a.添加运动指令:
i.选中Pick Retract,点击MoveJ,此时生成一个程序,重命名为:PickAndPlace。
ii.然后选中Pick,点击MoveL,选中Pick Retract,点击MoveL,选中Place Retract,点击MoveL,选中Place,点击MoveL,最后选中Place Retract,点击MoveL。
2.添加仿真指令。
a.选中MoveL(Pick),那么就会在 MoveL(Pick)后添加指令➔事件指令。动作选择Attach Object。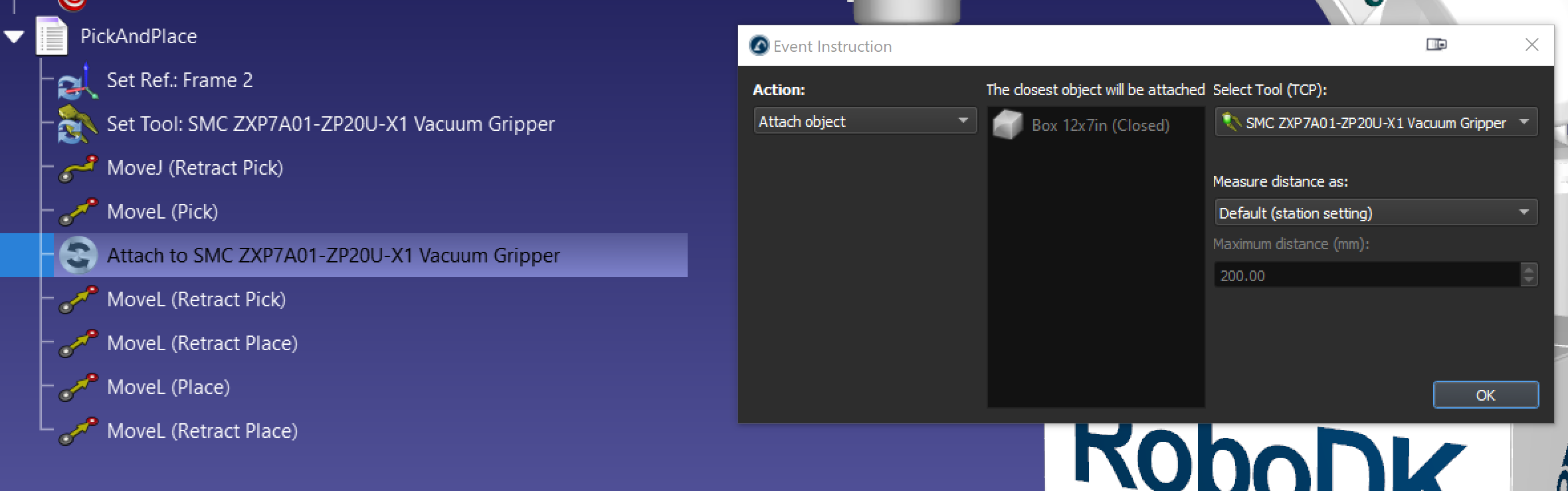
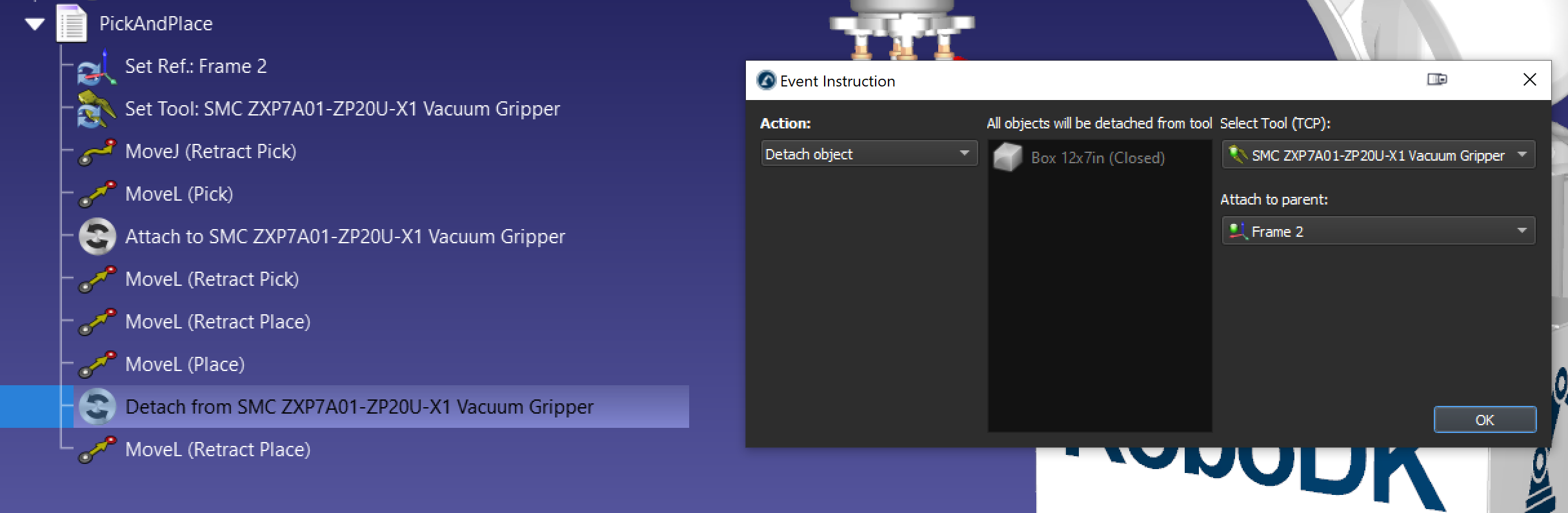
b.在 MoveL(Place)动作后添加一个事件指令,动作选择Detach object。连接到上一级选项允许允许在对象从夹具上分离后将对象附加到新对象。
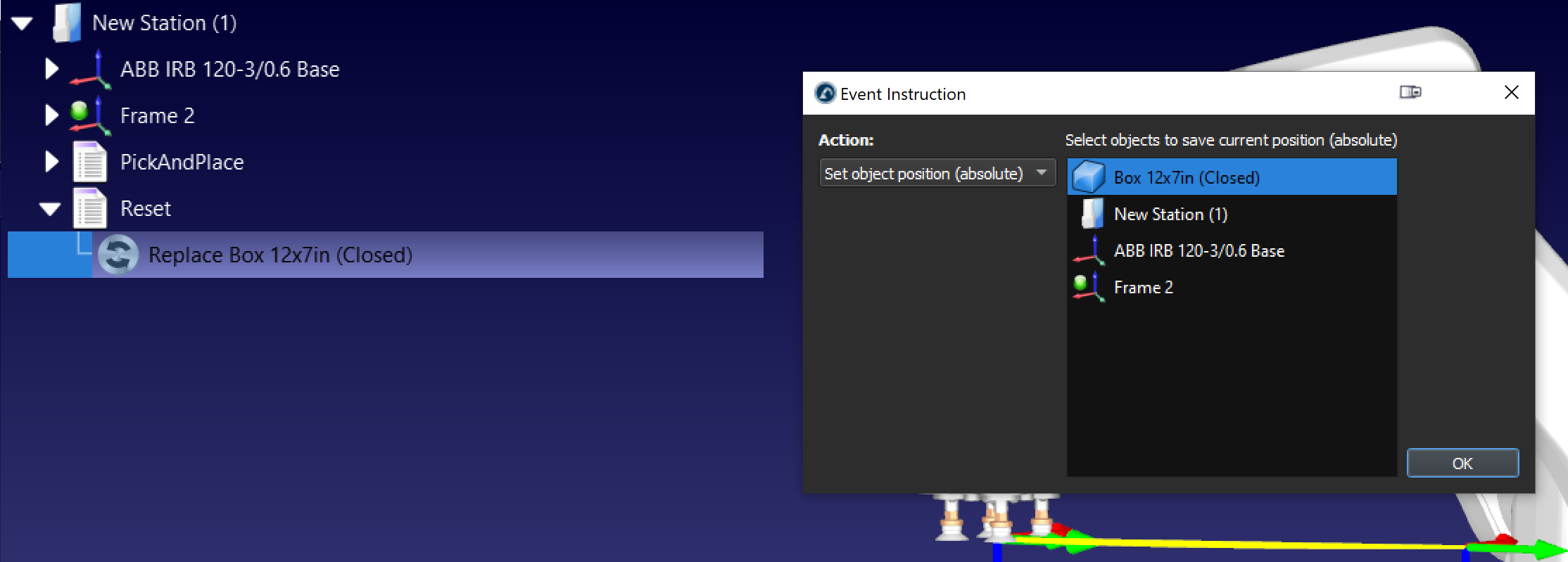
c.如果需要,也可以单独创建一个带有事件操作的程序 Set object position(absolute),将箱重置到原点位置。
按照以上的步骤,你就可以在 RoboDK 中成功创建一个简易的拾放站。
取放与组装
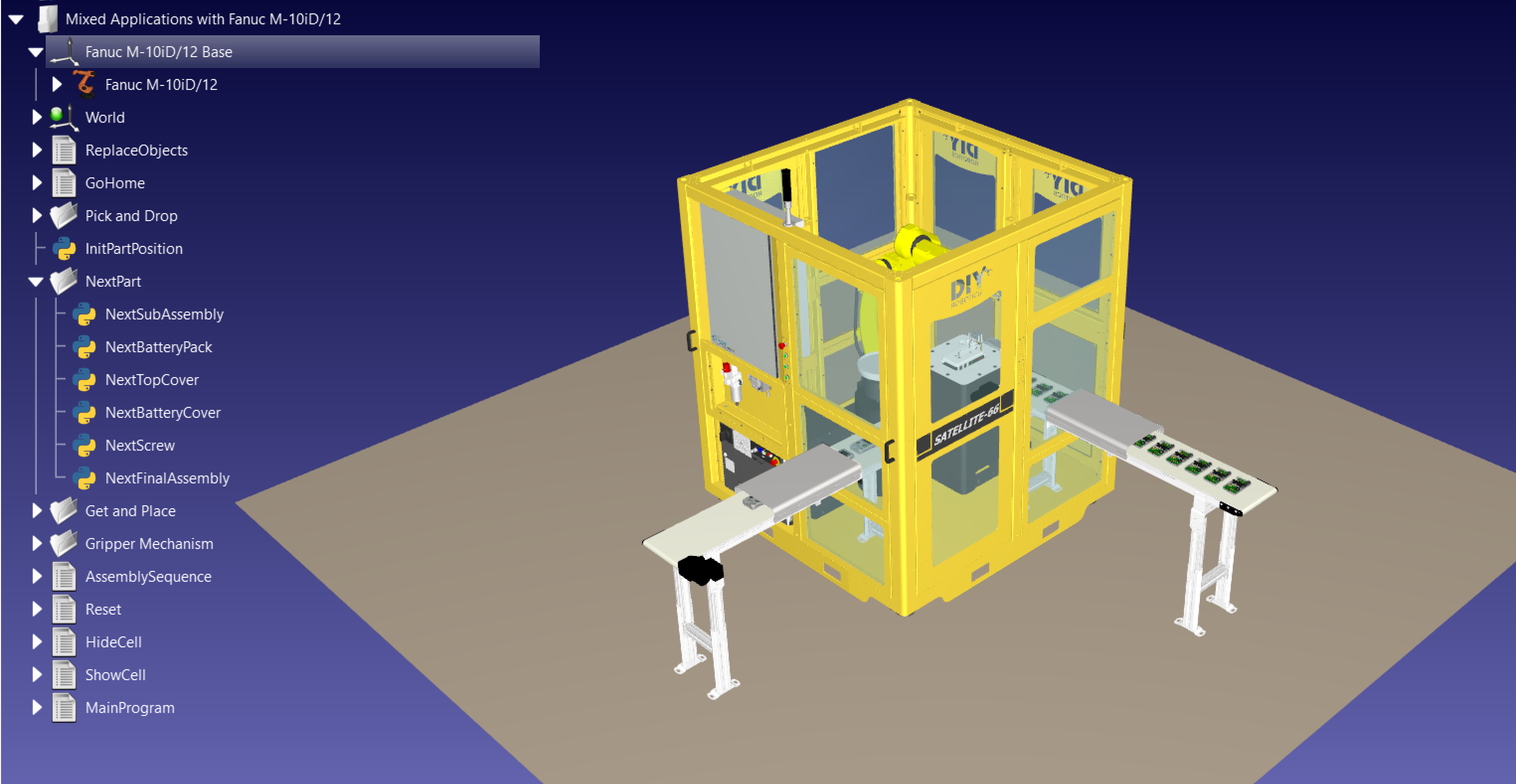
取放程序可用于自动化组装操作。通过多次使用 "attach object "事件,可以一次拾取多个物体并创建装配拾取。例如,如果装配中有 3 个物体,则可以使用该事件 3 次,如下图所示。
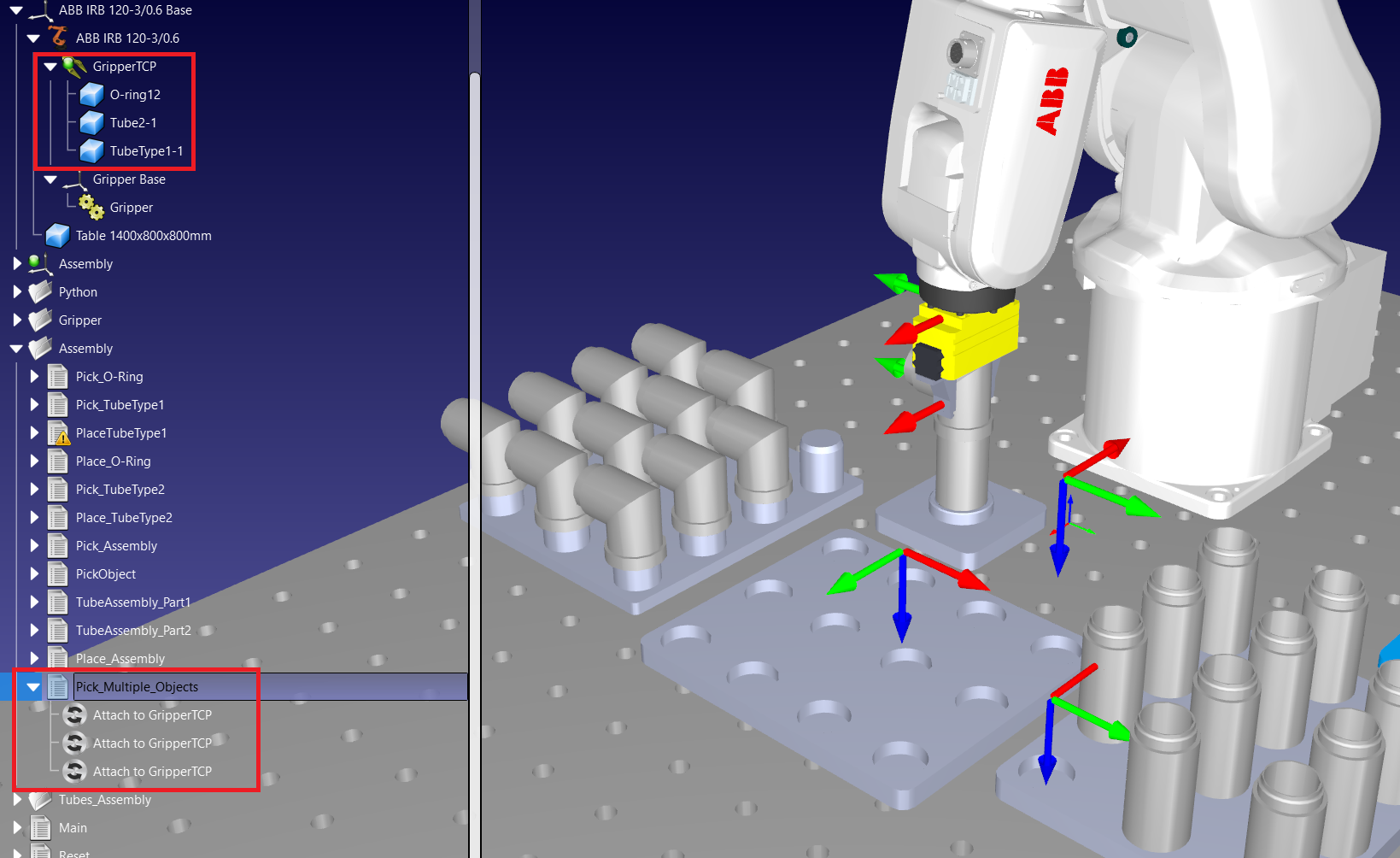
Tip:你可以在此处找到拾取和放置装配操作的案例。
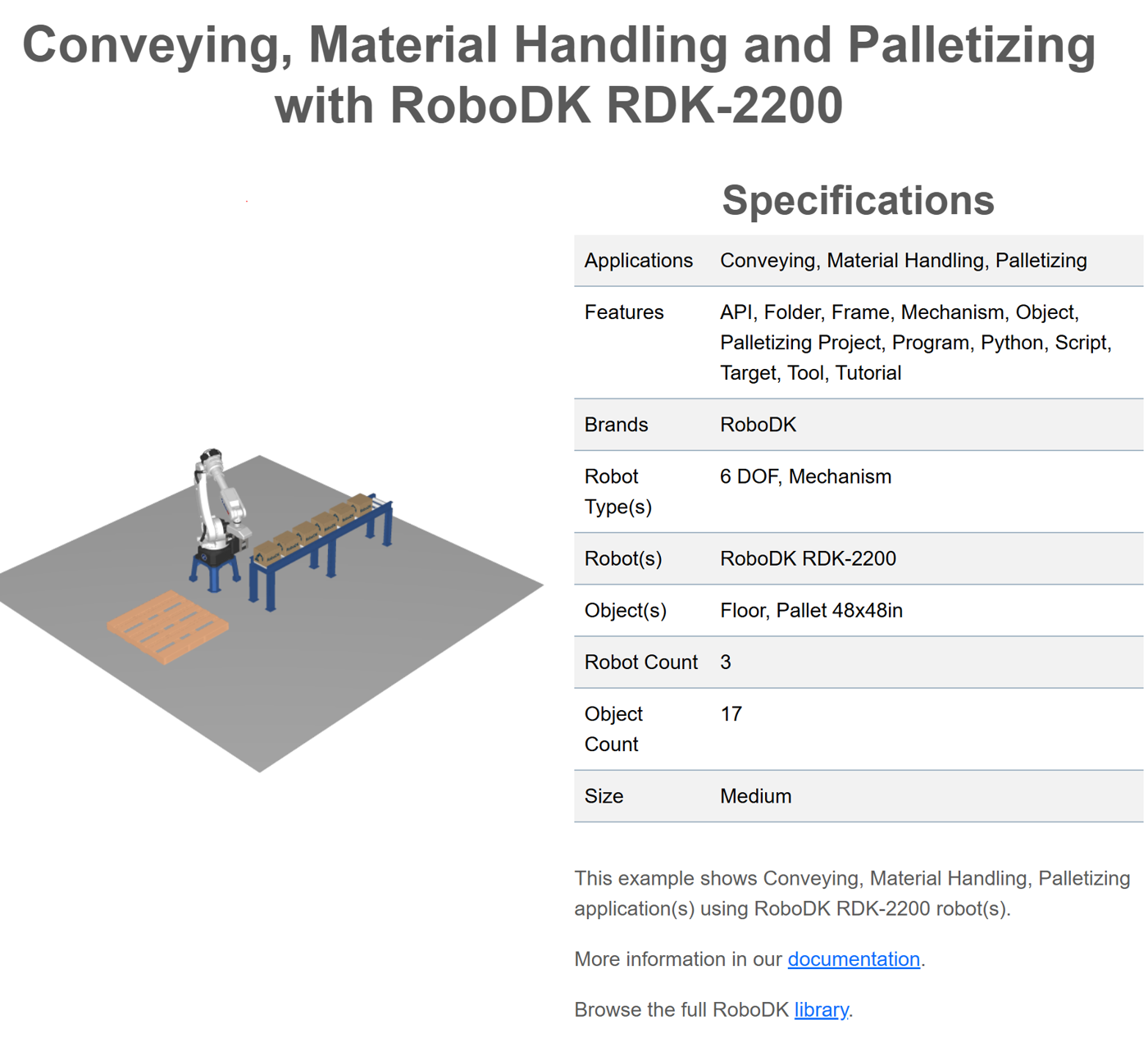
使用托盘码垛插件
如果你有涉及码垛模式的具有重复性取放作业,可以使用我们的码垛插件来简化任务。下载我们的码垛插件:托盘码垛插件市场。有关码垛插件的更多信息查阅码垛帮助文档。
Tip:通过此案例,你可以了解如何正确使用托盘码垛插件。
使用 API
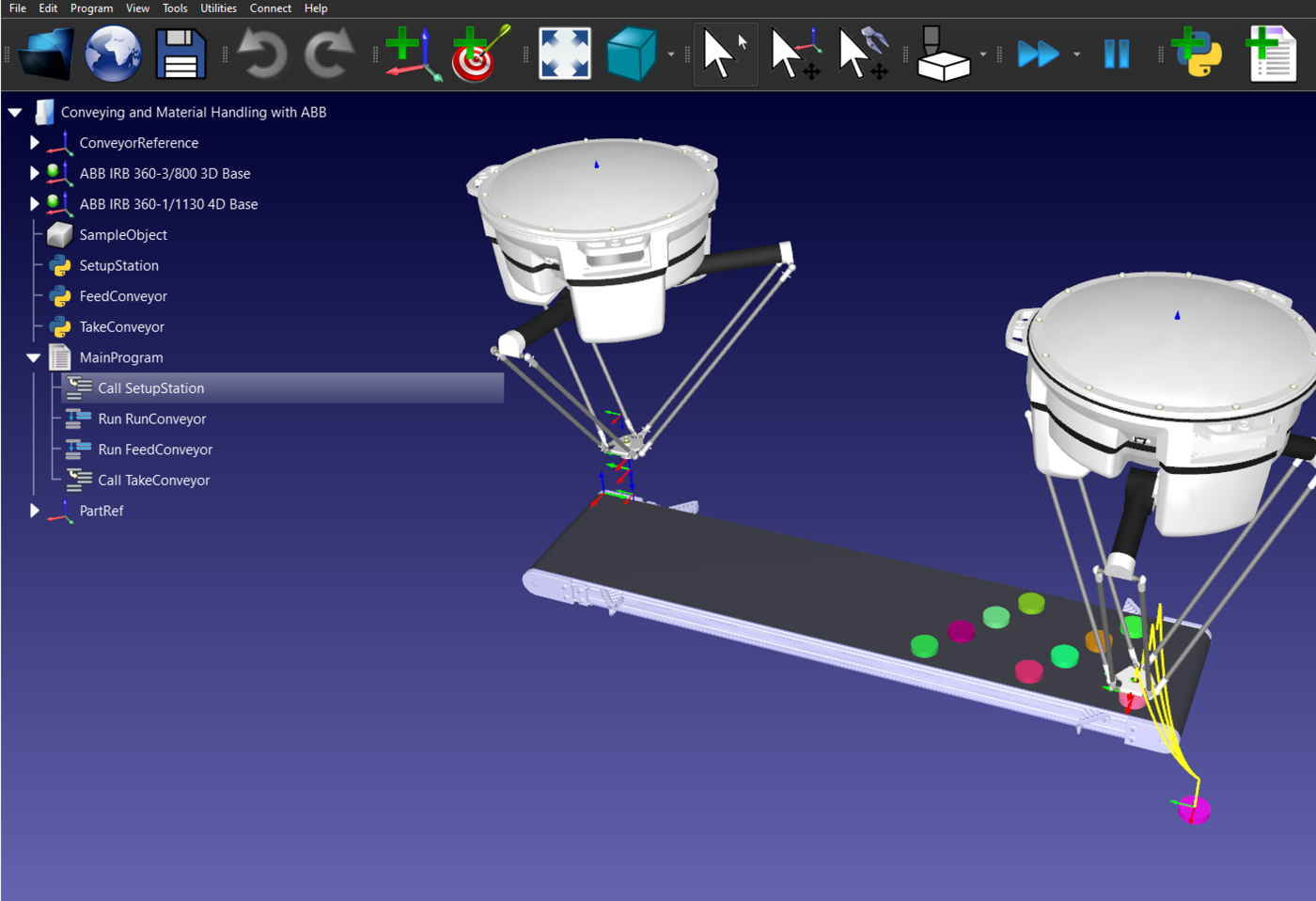
如果你需要更高级的拾取和放置操作,如拾取大型组装件或从移动的传动带上拾取物体,你可以使用 API 对你的拾取和放置应用程序进行编程。
本案例使用 RoboDK API 与 Python,在移动的传动带上拾取和放置物体,你可以从我们的资源库中下载。
Tip:你可以阅读这个文档,找到更多有关RoboDK API的信息。
你还可以看看这个装配站,它使用多个部件,通过多次拾取和放置操作来创建最终装配:Mixed Applications with Fanuc M-10iD/12。