创建取放程序
请按照以下步骤在 RoboDK 中创建一个基本的取放程序:使用真空夹爪的六轴机器人手臂移动一个箱。
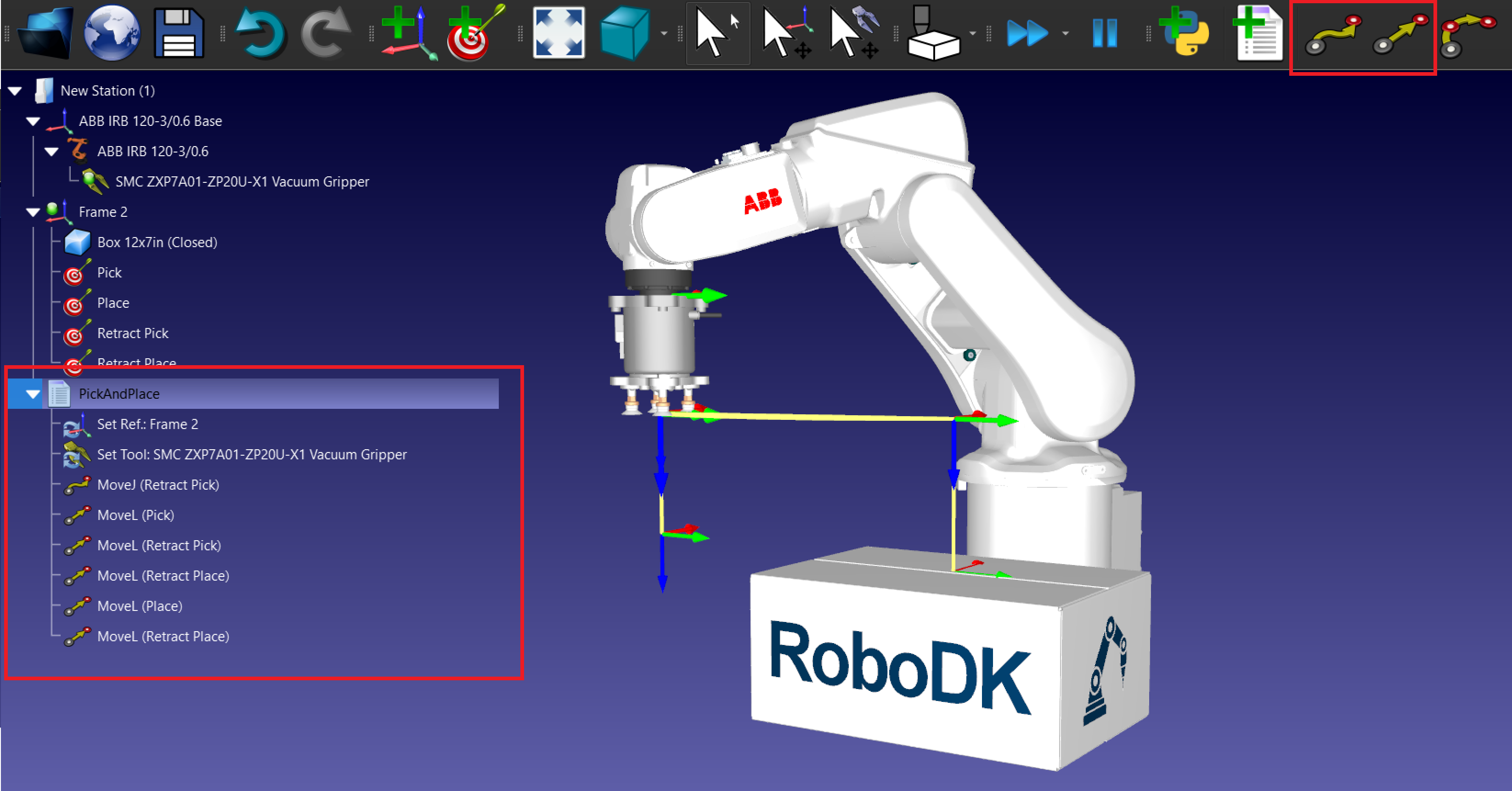
1.创建取放编程:
a.添加运动指令:
i.选中Pick Retract,点击MoveJ,此时生成一个程序,重命名为:PickAndPlace。
ii.然后选中Pick,点击MoveL,选中Pick Retract,点击MoveL,选中Place Retract,点击MoveL,选中Place,点击MoveL,最后选中Place Retract,点击MoveL。
2.添加仿真指令。
a.选中MoveL(Pick),那么就会在 MoveL(Pick)后添加指令➔事件指令。动作选择Attach Object。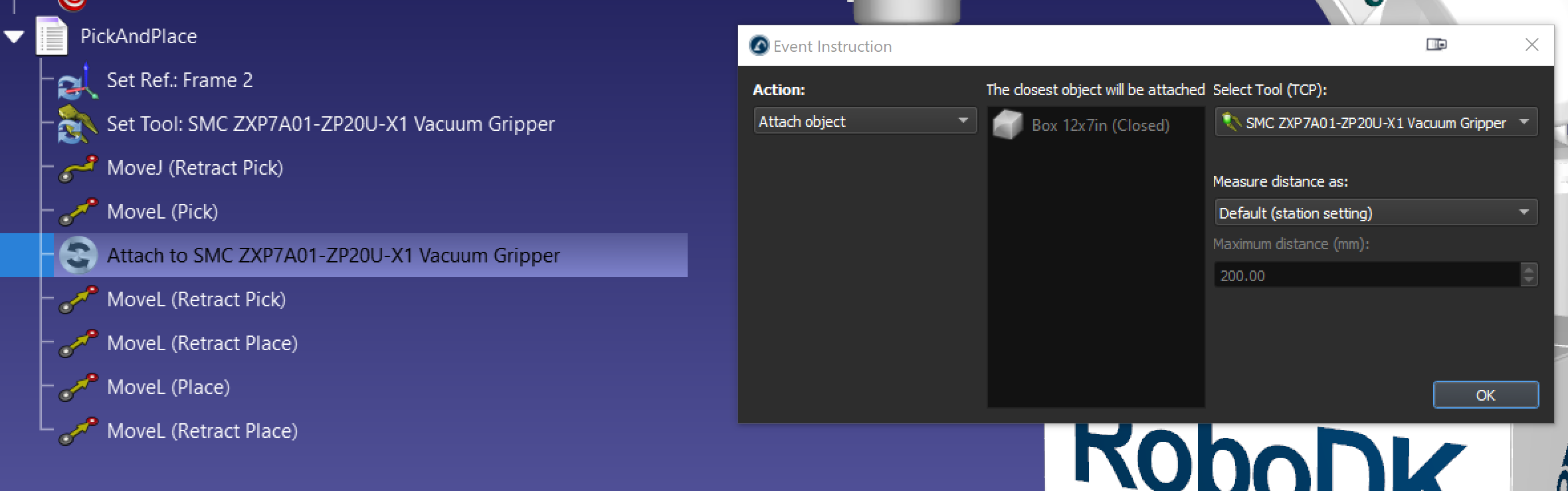
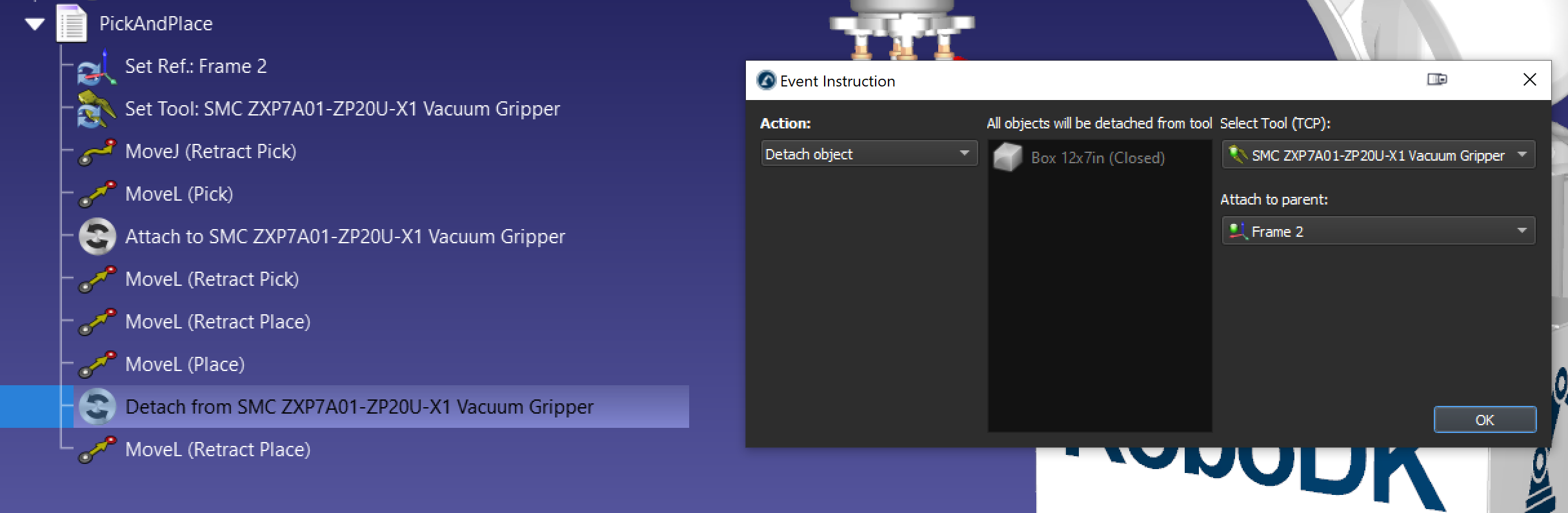
b.在 MoveL(Place)动作后添加一个事件指令,动作选择Detach object。连接到上一级选项允许允许在对象从夹具上分离后将对象附加到新对象。
c.如果需要,也可以单独创建一个带有事件操作的程序 Set object position(absolute),将箱重置到原点位置。
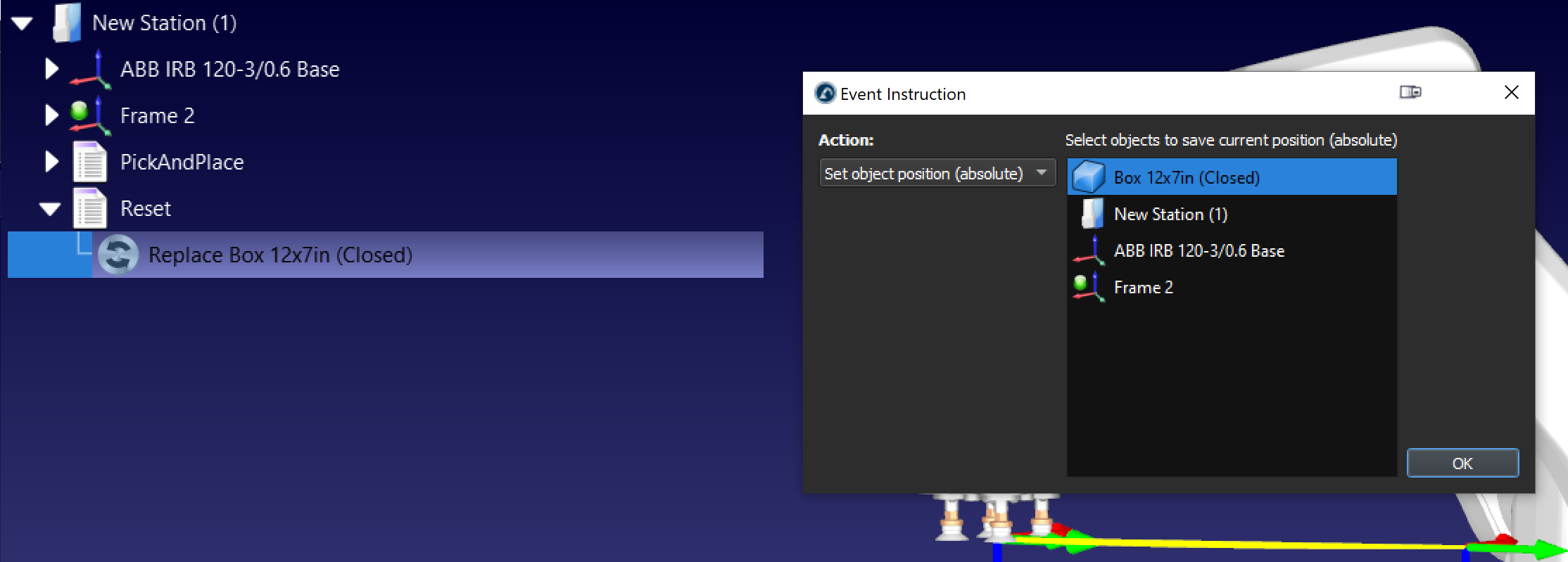
按照以上的步骤,你就可以在 RoboDK 中成功创建一个简易的拾放站。