使用
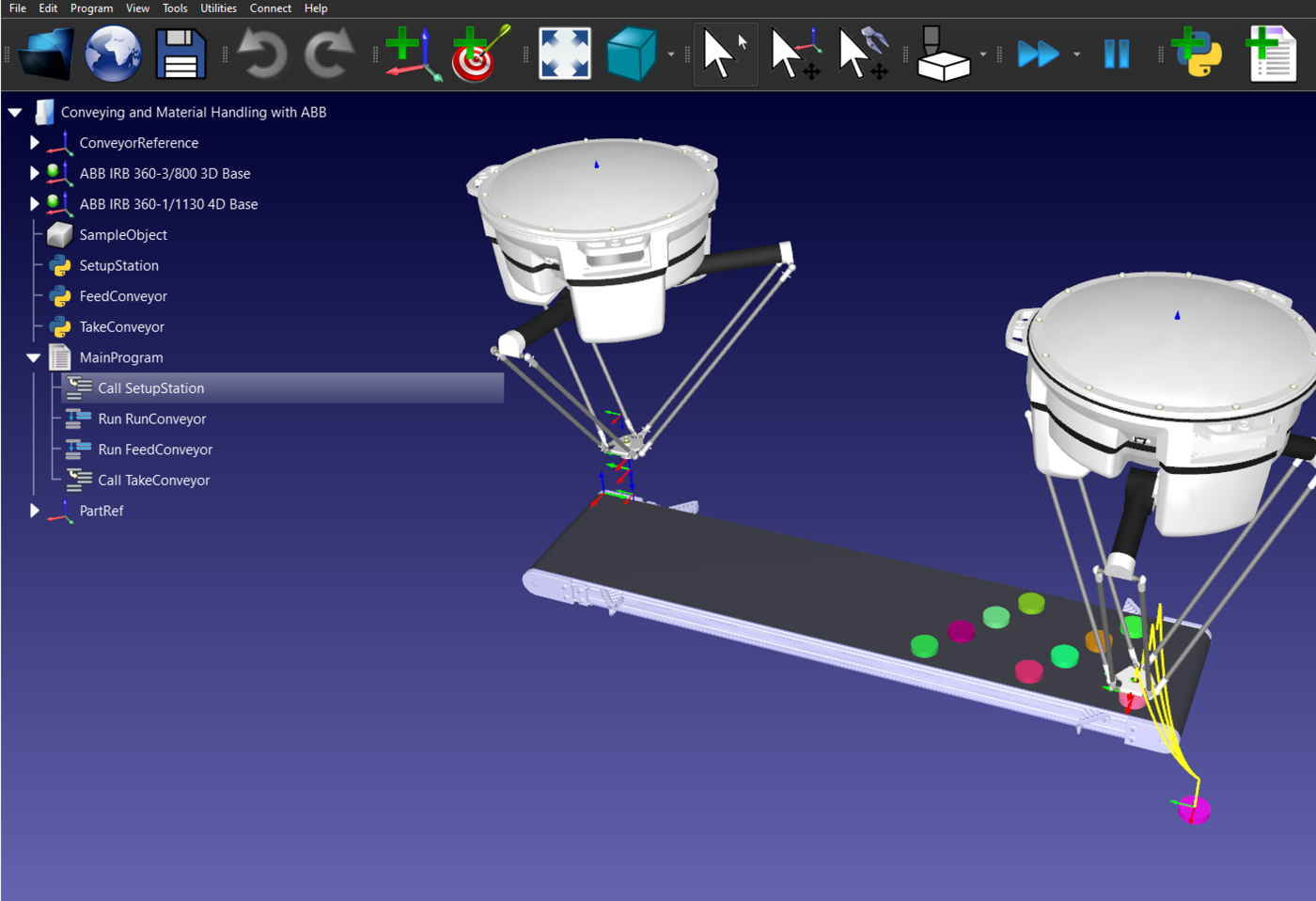
如果你需要更高级的拾取和放置操作,如拾取大型组装件或从移动的传动带上拾取物体,你可以使用 API 对你的拾取和放置应用程序进行编程。
本案例使用 RoboDK API 与 Python,在移动的传动带上拾取和放置物体,你可以从我们的资源库中下载。
Tip:你可以阅读这个文档,找到更多有关RoboDK API的信息。
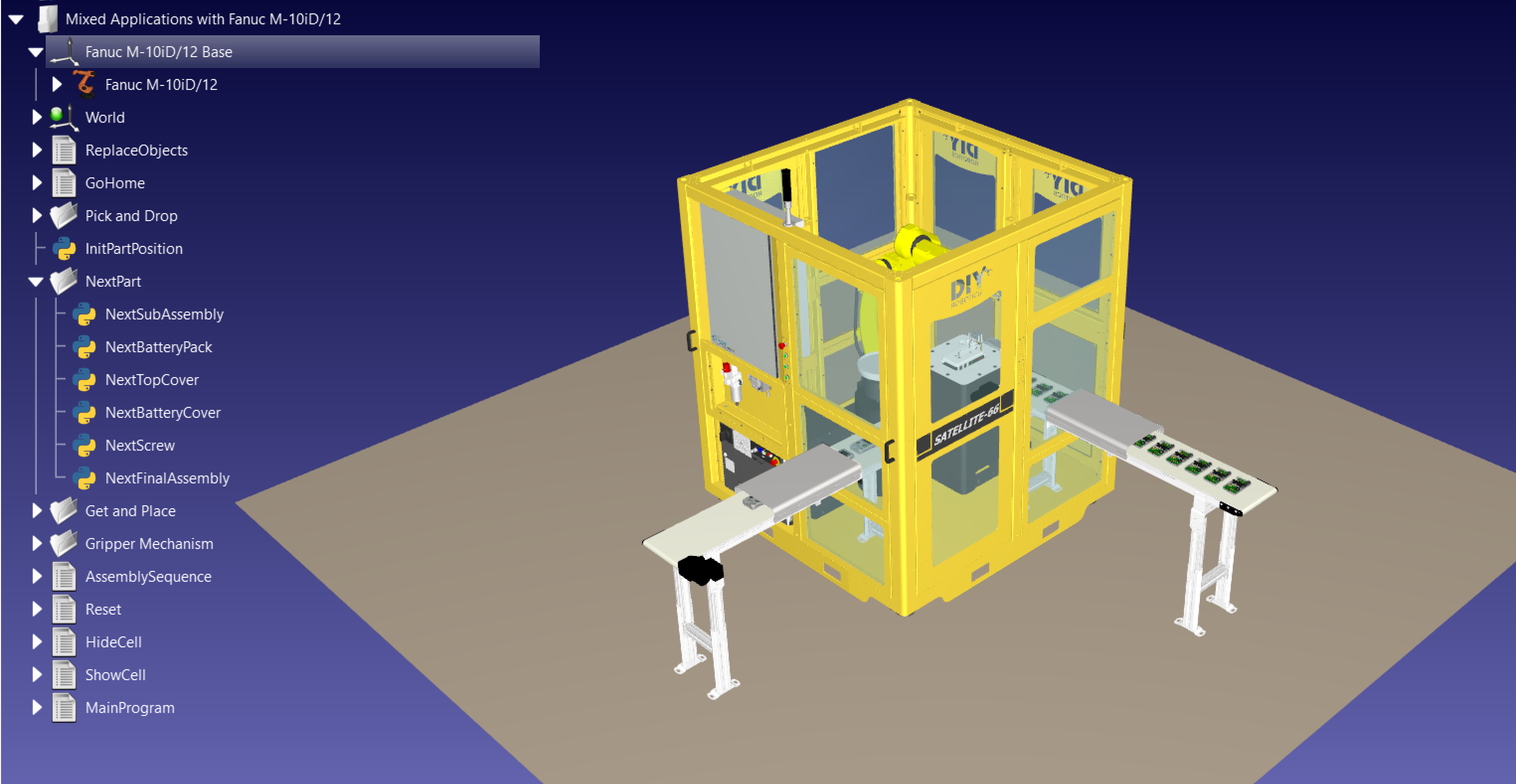
你还可以看看这个装配站,它使用多个部件,通过多次拾取和放置操作来创建最终装配:Mixed Applications with Fanuc M-10iD/12。
如果你需要更高级的拾取和放置操作,如拾取大型组装件或从移动的传动带上拾取物体,你可以使用 API 对你的拾取和放置应用程序进行编程。
本案例使用 RoboDK API 与 Python,在移动的传动带上拾取和放置物体,你可以从我们的资源库中下载。
Tip:你可以阅读这个文档,找到更多有关RoboDK API的信息。
你还可以看看这个装配站,它使用多个部件,通过多次拾取和放置操作来创建最终装配:Mixed Applications with Fanuc M-10iD/12。