设置
本示例使用一个简单的设置:一个安装在台面上的机械手(本例中使用的是 ABB 机械手)、一个放置刚成型零件的料堆、一个放置加工好的零件的料堆和中间用于固定零件的夹具。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
导入该案例:
1.选择:文件 ➔
2.从RoboDK 的示例部分找到塑料去毛刺示例:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
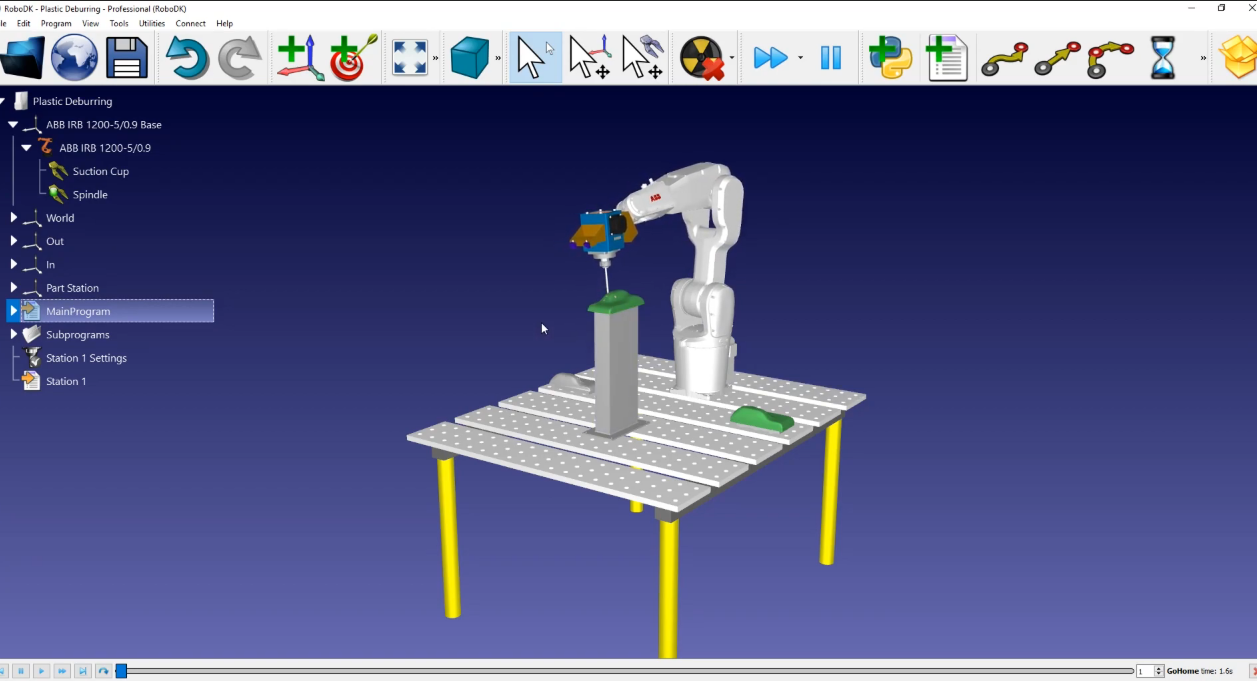
示例导入到RoboDK工作站后,随后打开Fusion 360。