Deburring
简介
机器人塑料去毛刺,包括机械臂去除塑料模具部件上多余的材料。本示例会指导你在 RoboDK 中创建这个项目,用于机器人仿真和离线编程。本例还展示了如何使用Fusion 360 插件在 RoboDK 中生成刀具路径。
Video:通过Autodesk Fusion 360 的RoboDK插件,用 ABB 机器人去塑料毛刺:https://www.youtube.com/watch?v=HaMICaEjaAk
使用Fusion 360 的 RoboDK 插件,你可以更高效地创建一个机器加工项目,并将生成的路径自动导出到 RoboDK 中。然后,RoboDK 会将其转化为机器人程序。你可以轻松地将在 SolidWorks 中创建的 3D 模型加载到 RoboDK 中。RoboDK 插件可让你直接在Fusion 360中为任何机械臂编程,适用于任何制造应用。
Tip: 更多有关Fusion 360的RoboDK插件,请点击这里。
塑料去毛刺
要启动该项目,首先要从默认资源库中选择 RoboDK 的塑料去毛刺示例。
设置
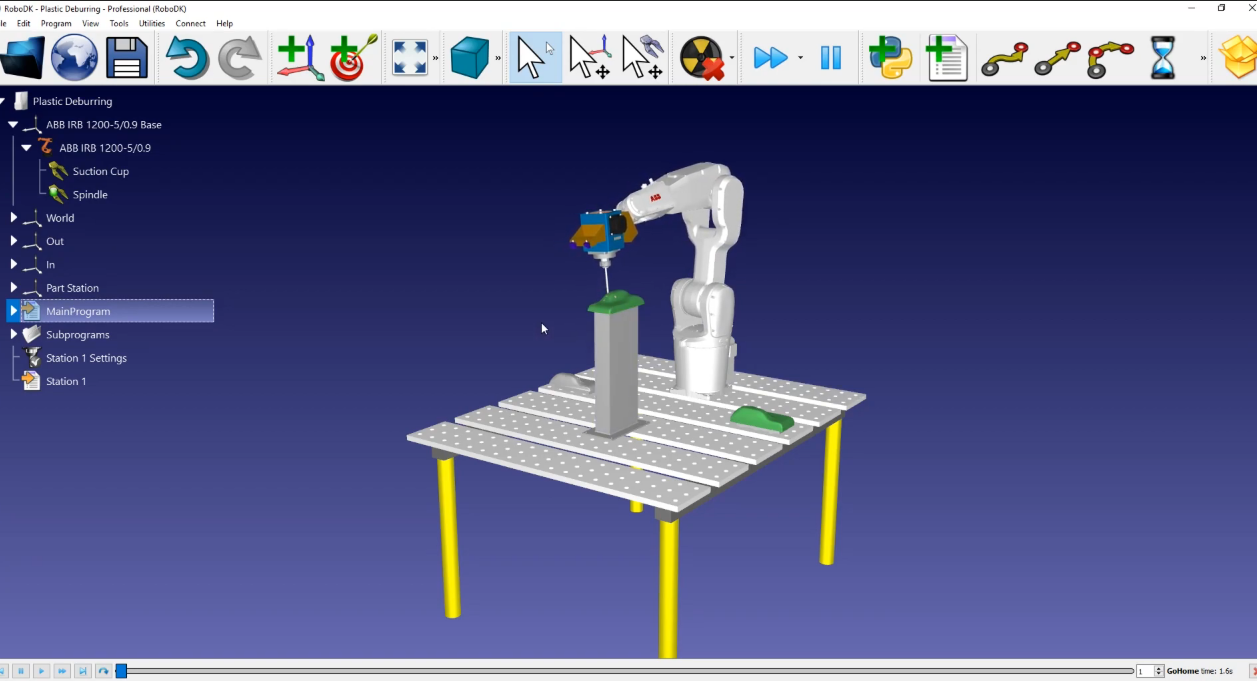
本示例使用一个简单的设置:一个安装在台面上的机械手(本例中使用的是 ABB 机械手)、一个放置刚成型零件的料堆、一个放置加工好的零件的料堆和中间用于固定零件的夹具。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
导入该案例:
1.选择:文件 ➔
2.从RoboDK 的示例部分找到塑料去毛刺示例:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
示例导入到RoboDK工作站后,随后打开Fusion 360。
绘制Fusion 360 2D草图
在Fusion 360 中打开物体。本例中的物体是一个塑料零件。此项目的目标是去除三个孔中的多余材料,以及零件底部附近的所有材料。
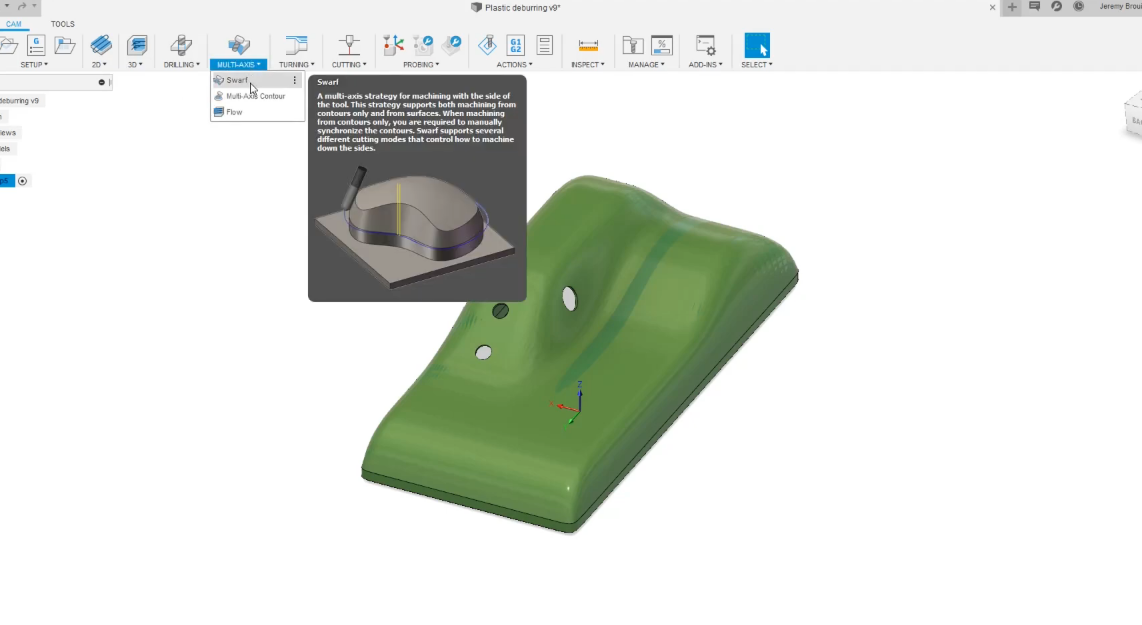
首先,需要确保你处于 Fusion 的Manufacturing工作区选项卡中。我们应该按照以下步骤创建工具路径:
1.选择加工策略:选择:Multi-Axis,然后选择工具:Swarf 。
2.刀具选择与初始路径设置:从刀具库中选择要使用的刀具,本示例使用RoboDK工作站中的自定义刀具,选择第一个孔特征创建初始路径
3.加工另一侧表面:要获得表面右侧的工具路径,我们将选择: Machine Other Side,然后选择OK。每个孔都按照此步骤操作。
4.底部表面加工:要对底部零件做同样的处理,你要选择工具:Swarf ,然后选择底部零件。
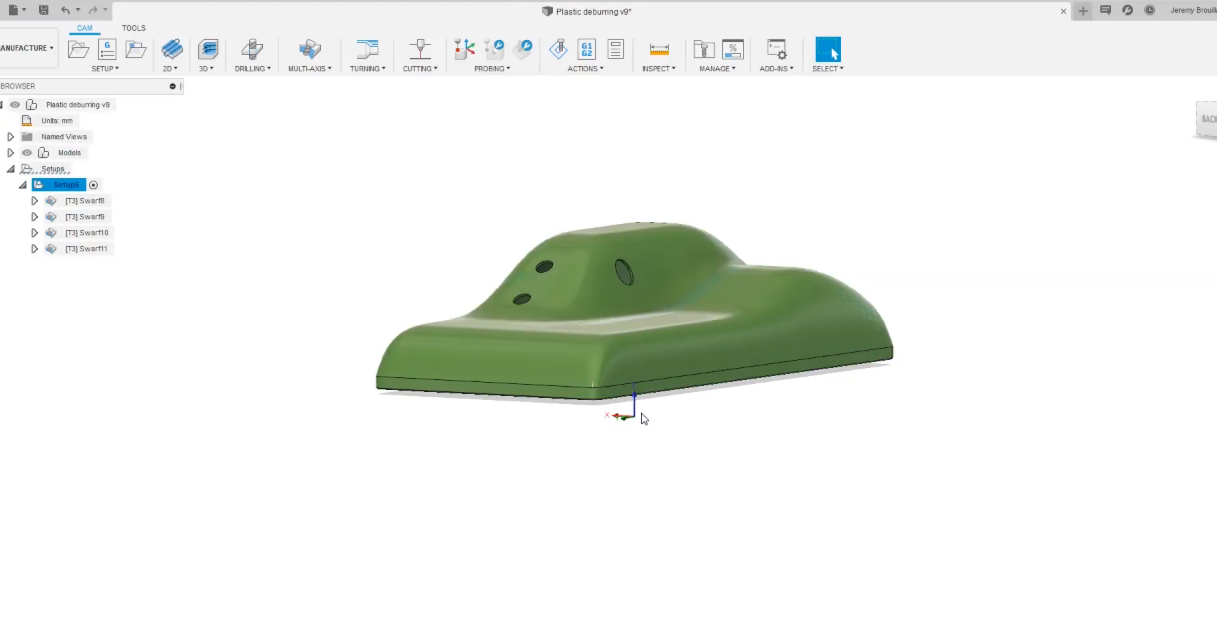
5.路径计算与验证:计算完成后,我们将模拟刚刚创建的路径:选择Setup ,然后选择Simulate。
这样,机器人就有了完整的工具路径。我们需要返回 RoboDK,确保 "去毛刺 "参考坐标系已激活。为此,我们必须
打开 RoboDK:选择:Deburring ,然后选择激活参考系。
现在去毛刺参考系已激活,程序将根据该参考系导出。返回 Fusion 360 并验证图像是否如图所示:
按照以下步骤将草图导入 RoboDK:
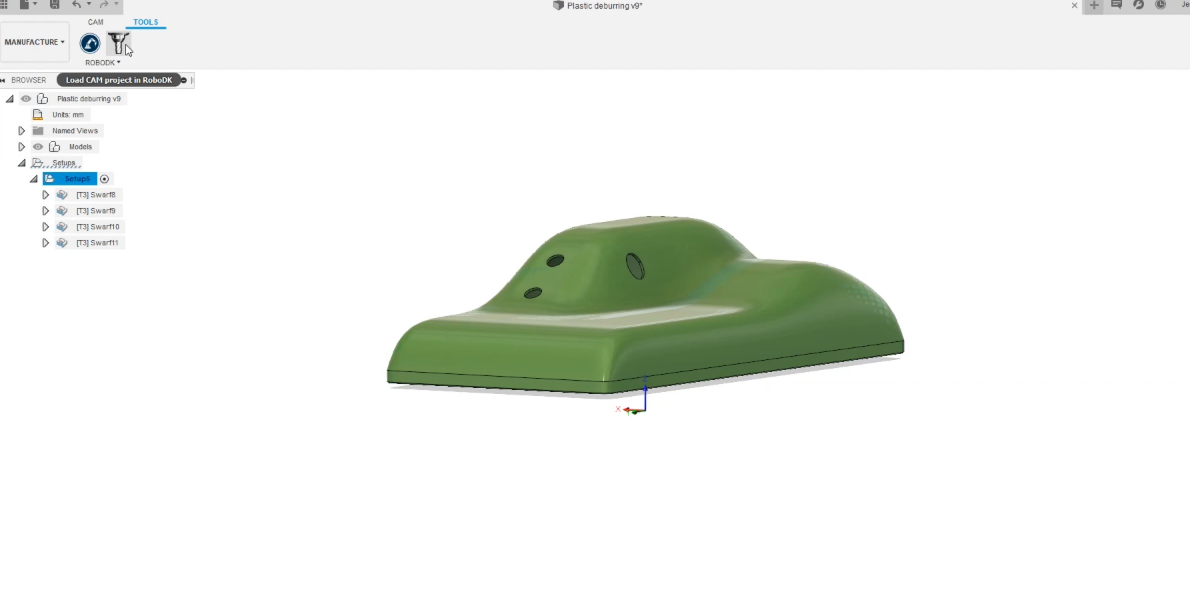
1.在 Fusion 360 中,因为你有 RoboDK 插件,你可以在菜单栏选择:Load CAM project in RoboDK。
2.如果我们回到 RoboDK,就可以在其位置找到切割路径。创建了一个名为:Plastic Deburring的机器加工项目,右键点击参考坐标:Deburring,然后选择:可见。
3.我们可以将切割刀具路径重命名为:Station1 Settings:右键单击 "塑料去毛刺 "重新命名。
工作站设置
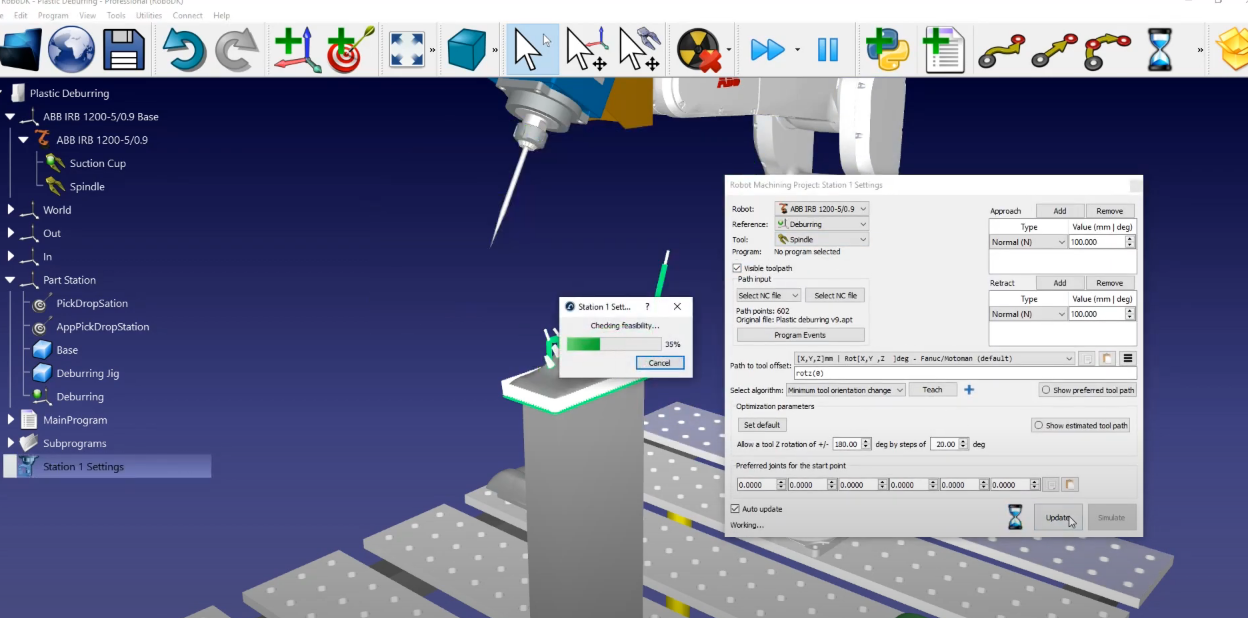
在 RoboDK 中准备好机器人刀具路径后,我们应确保虚拟机器人单元与实际设置相匹配。在 RoboDK 中,我们要确保在生成机器人程序之前,使用正确的工具和参考坐标系进行制造操作。
在本例中,我们选择了参考坐标Durring,工具为主轴Spindle。点击更新➔ 模拟。
如果要重新排序或切换路径部分的意义,请按照以下步骤操作:
1.CAM项目通常已自带进刀和退刀运动设置,因此我们可以移除自定义设置:只需进入"趋近"和"退出"选项,选择符号减号。点击"更新"后执行"模拟"。
2.本示例中,默认参数已能生成有效结果。唯一需要额外调整的是主轴启停设置:打开"程序时间"→在路径趋近和退出路径之后勾选选项添加子程序,在进刀路径填写:Spindle(1),退出路径之后填写:Spindle(0) 。
3.选择更新。
现在,我们必须修改我们创建的程序名称:Station,并启动MainProgram。
最后一步是生成机器人程序。由于我们使用的是ABB机器人,因此需要导出适用于ABB机器人控制器的.mod文件,该文件采用ABB专有的RAPID编程语言编写。
1.确保我们使用正确的后处理器:选择工作站➔ 选择后处理程序➔ ABB RAPID IRC 5.
2.右键单击 Station1 程序,选择生成机器人程序。
你将自动在文本编辑器中看到机器人程序。你可以看到ABB机器人控制器所需的所有特定移动命令和语法。