绘制
在Inventor 中打开3D物体。在本例中,3D物体是一个需要抛光的外表面呈弧形的独木舟。
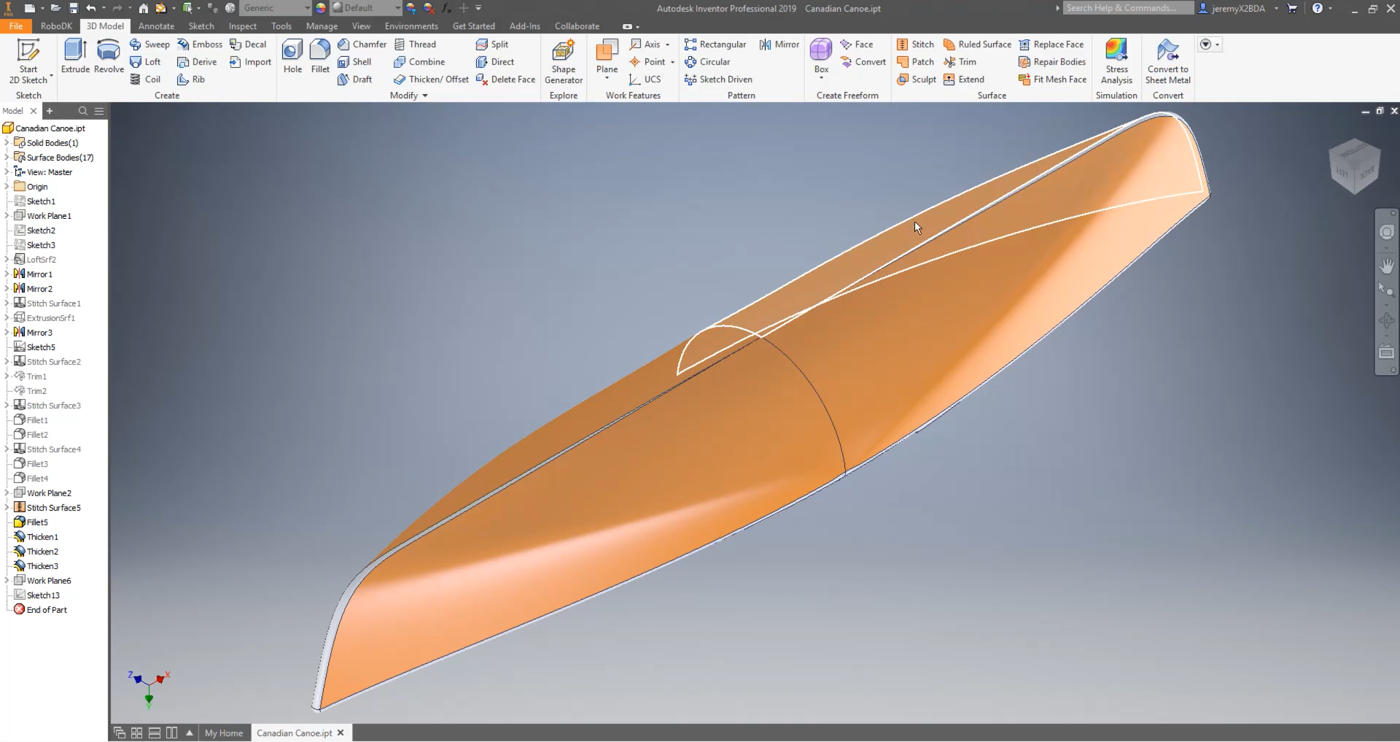
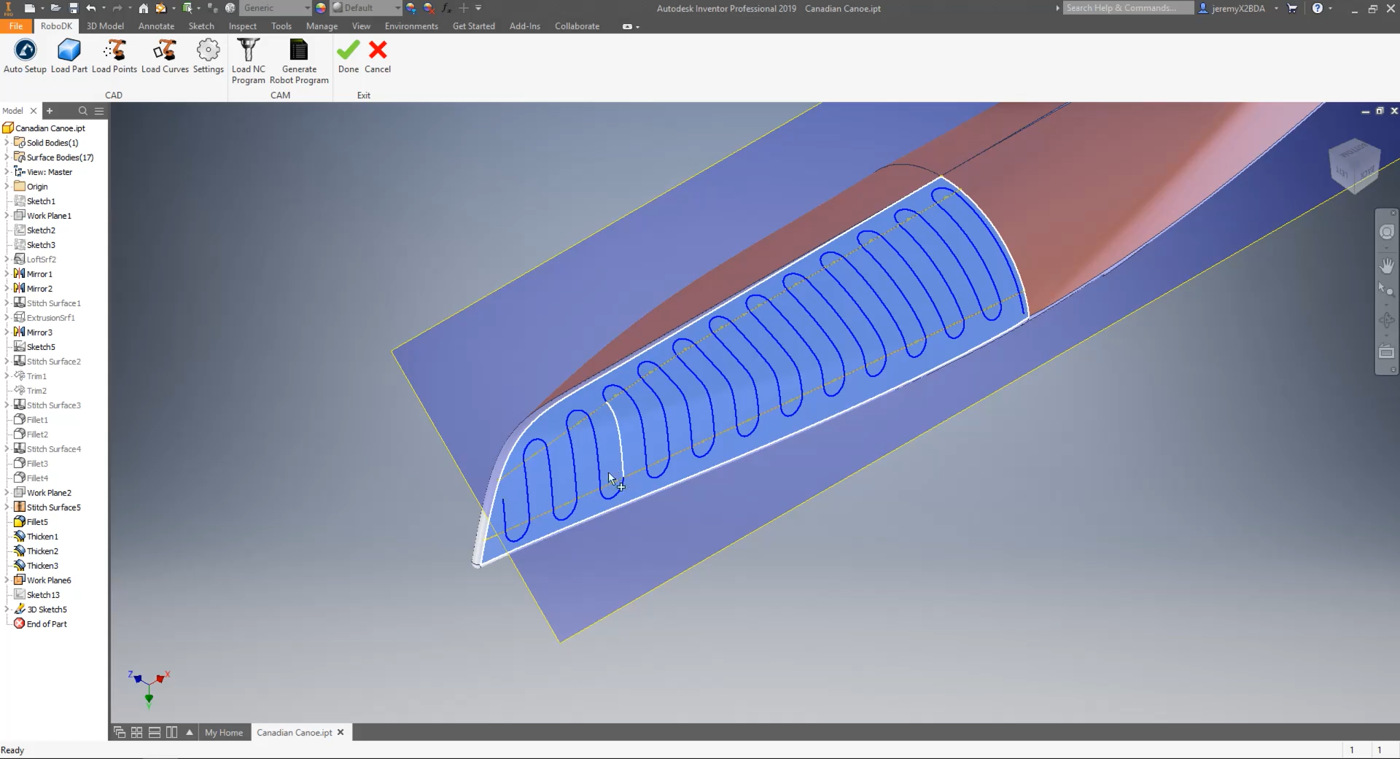
本项目目标是在曲面上创建并导入一条抛光路径。该路径将以上下运动的方式抛光零件的第一部分。
核心目标:在45°斜平面上创建往复运动路径,并投影至曲面
在本例中,RoboDK 已经绘制了路径。如下图所示,你可以右击左侧菜单中的Sketch13➔ Visibility,使其可见。
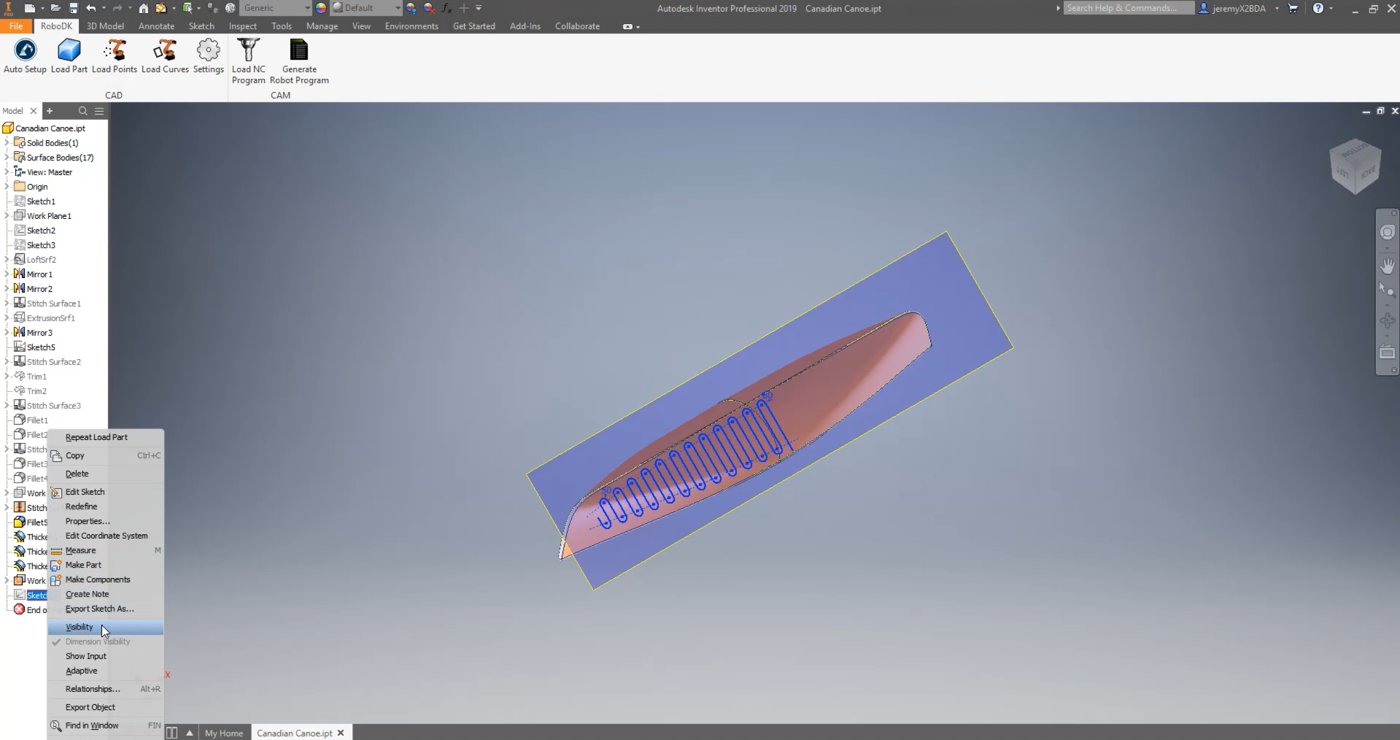
如图所示,路径覆盖了第一个选定部分的全部内容。如果需要,你可以右击Sketch13➔ Edit Sketch,重新打开草图并修改路径。
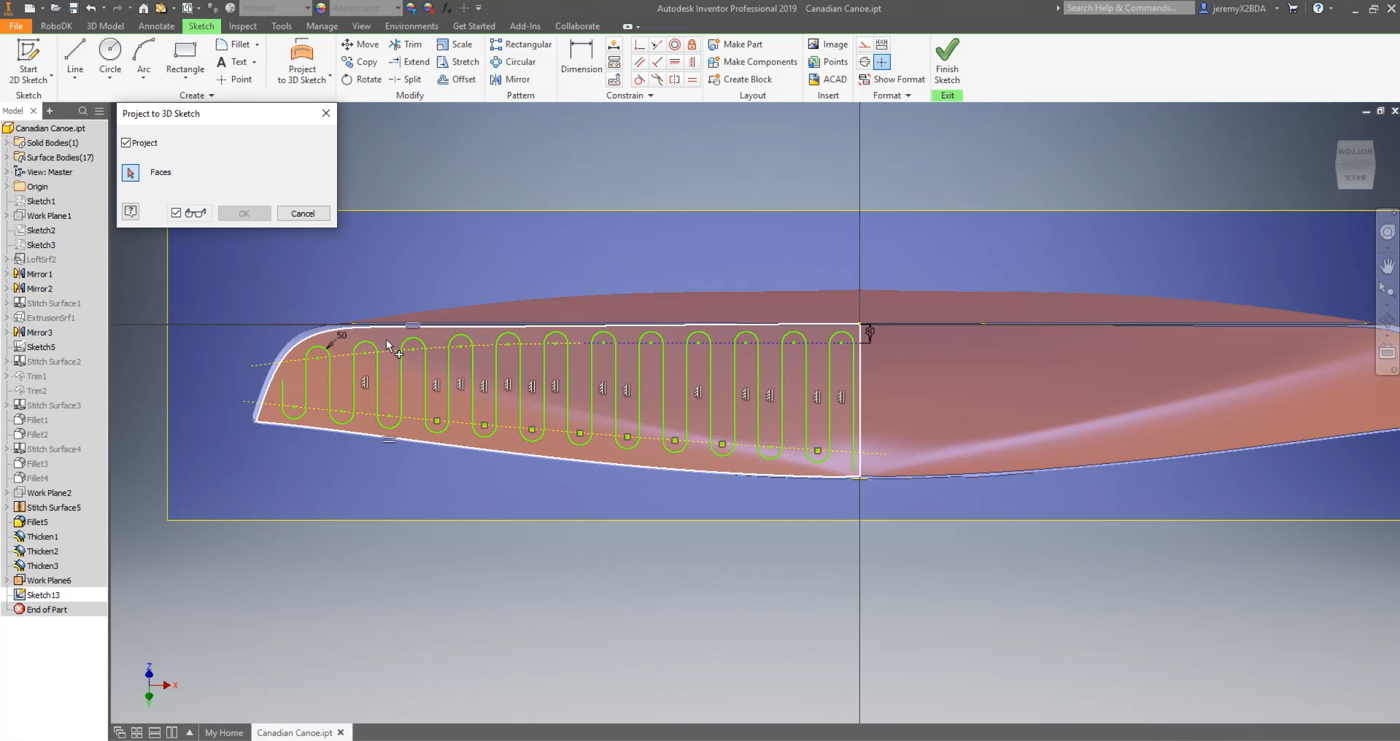
现在,使用 Inventor 工具在表面上投影该路径就很简单了:
1.在 Inventor 中选择选项卡:Sketch,然后选择:Project to 3D Sketch。
2.选择要投射路径:surface。
3.选择OK和Finish Sketch。
完成以上步骤,即会创建 3D 草图。
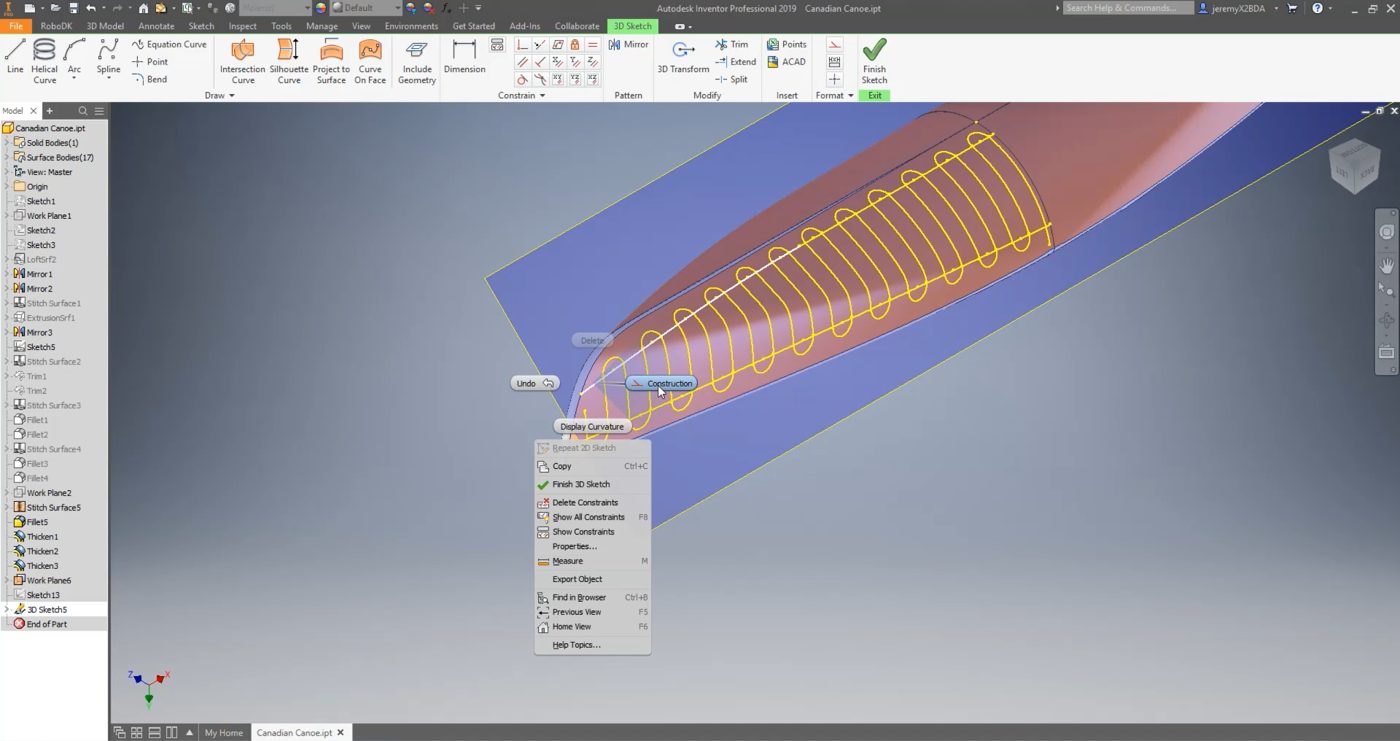
确保创建的施工线是定义正确的施工线:
1.右键点击Sketch13➔ Visibility,使路径可见。
2.右键点击Sketch13➔ Edit 3D Sketch
3.在 3D 模型上选择Line。
4.选择 Construction。
5.选择Finish Sketch。
按照接下来的步骤,将草图导入到 RoboDK:
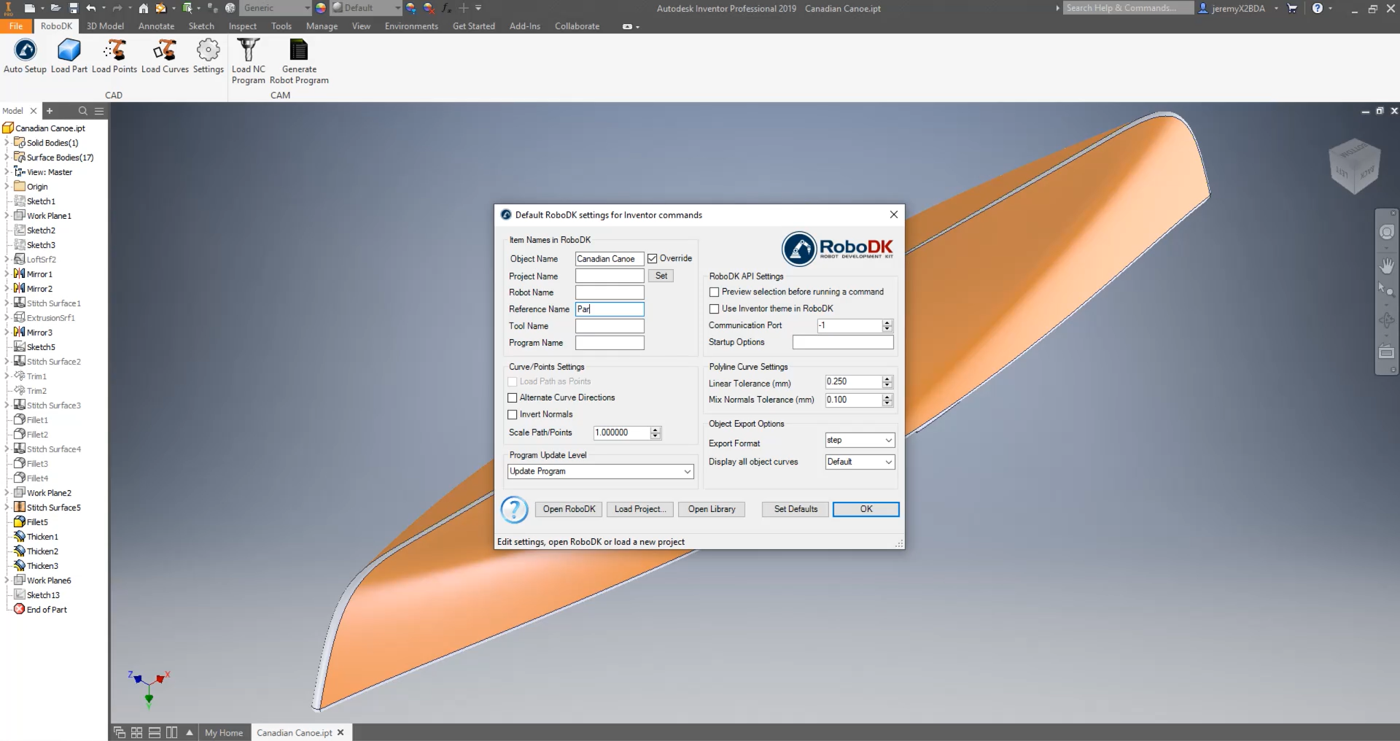
1.在Inventor中,选择RoboDK选项卡,然后选择:
2.输入Object Name。在本例中:Canadian Canoe(加拿大独木舟)。
3.输入要导入零件的Reference Name。在本示例中为零件。如果不提供任何参考系名称,将使用已激活的参考坐标系。如果没有激活的参考坐标系,将自动创建一个新的参考坐标系。
4.关闭窗口:Settings ,或选择OK。
5.选择按钮:
6.选择草图中的线及面后点击OK。此步骤至关重要,它将为RoboDK提供计算曲面法向量的必要数据,从而精确确定抛光工具在曲面上的空间姿态。
7.选择
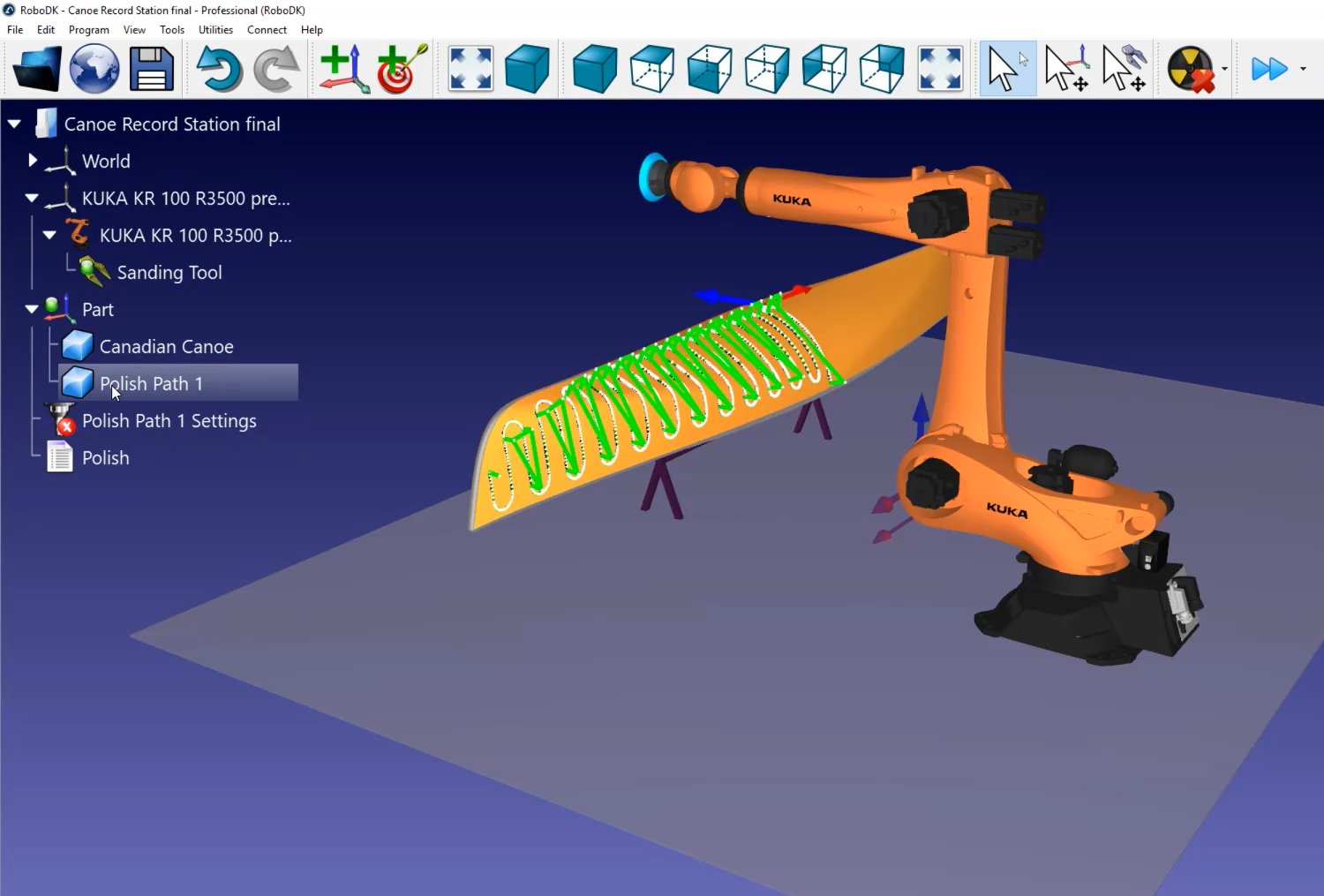
在激活参考坐标系(部件)上,你应该可以看到RoboDK 中加载的部件(加拿大独木舟)和路径(抛光路径 1)。