抛光示例
本节将向你介绍如何使用库卡(Kuka)机器人进行抛光。
设置
要完成该项目,首先要在默认资源库中下载RoboDK 的抛光示例。
Tip: 按照本指南一步步学习如何在 RoboDK 中创建机器人工作站。
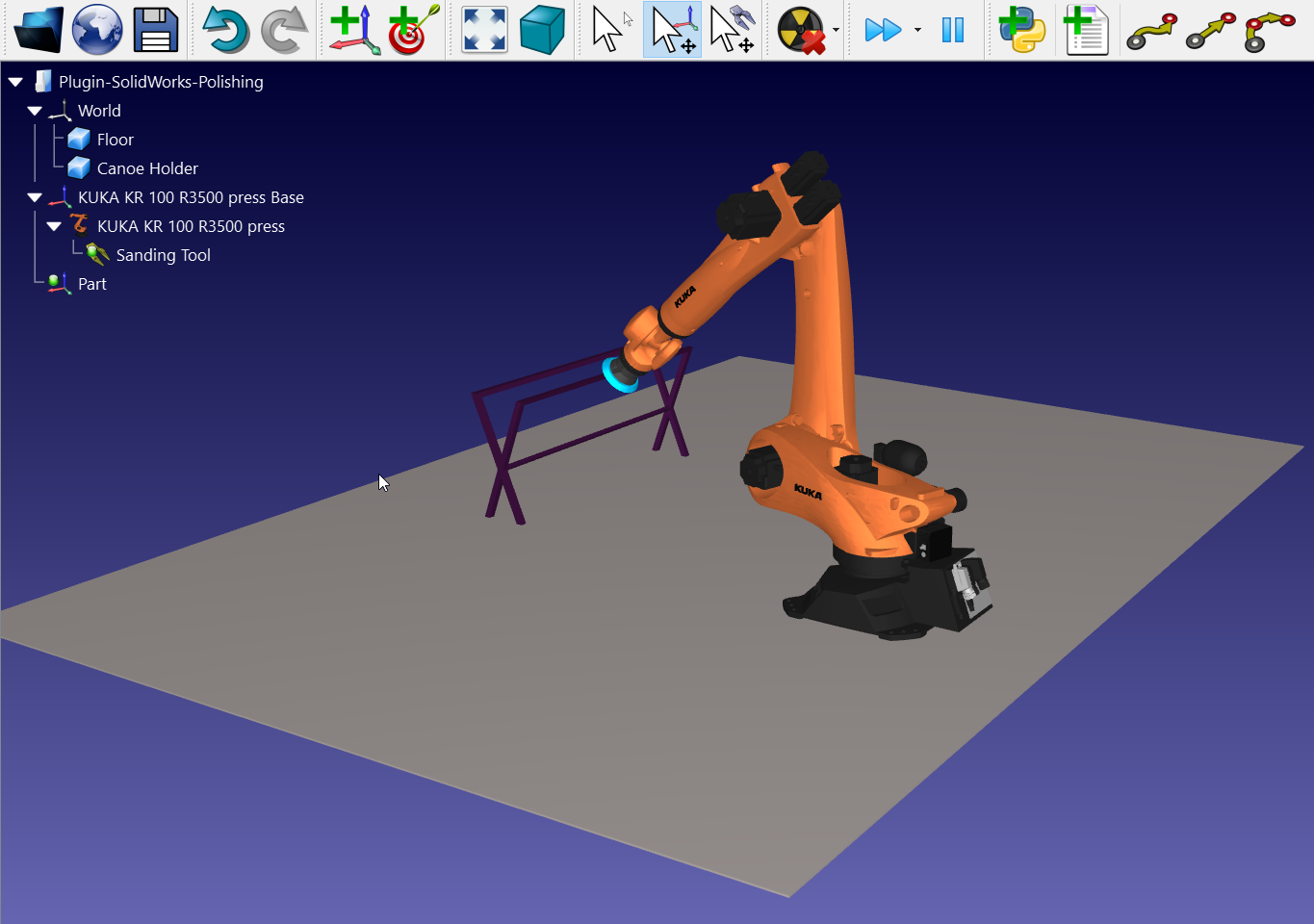
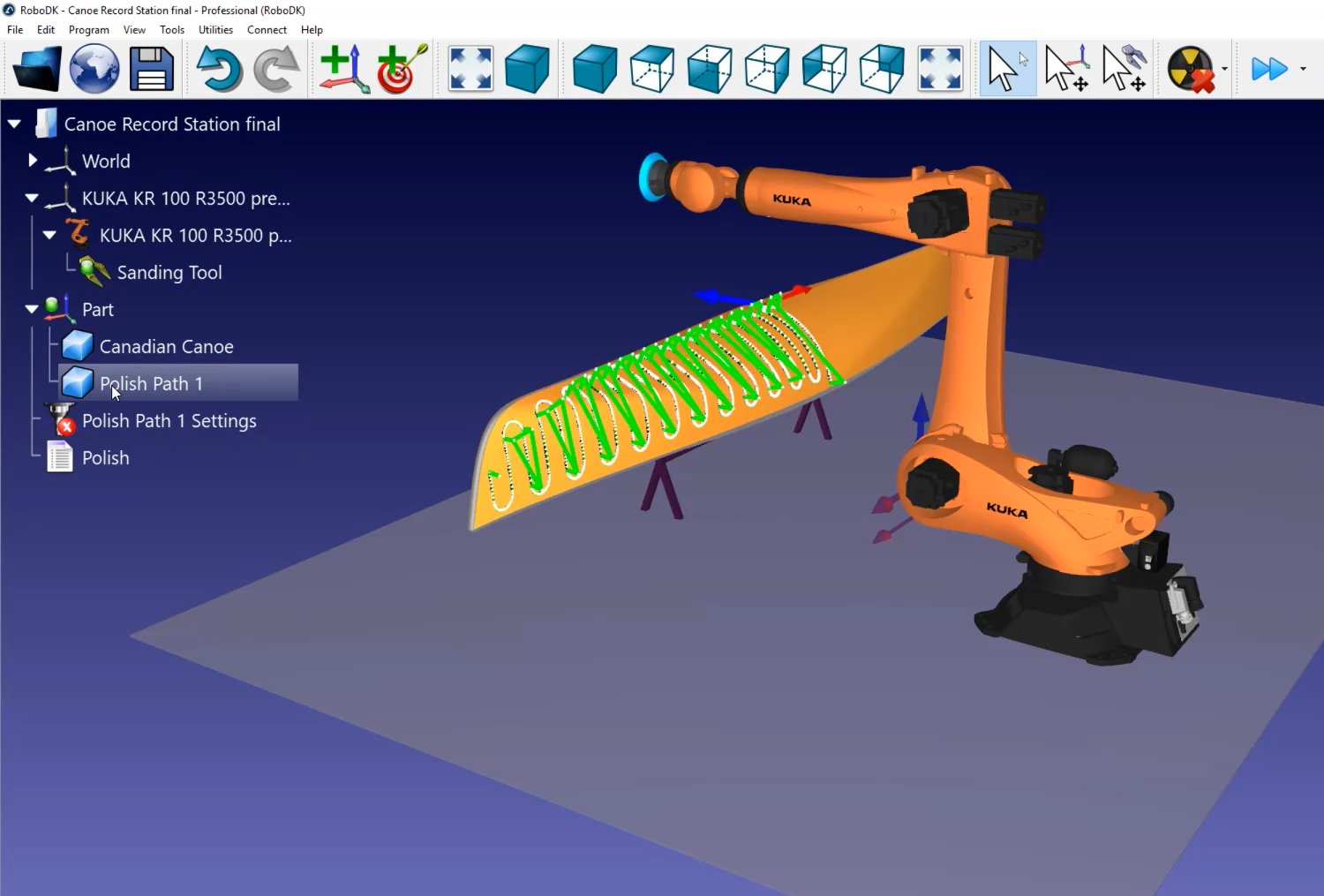
示例包括一个库卡(Kuka)机器人、旋转抛光工具、部件(独木舟)和独木舟所在的金属支架。
双击打开项目:
1.选择:文件 ➔
2.从RoboDK 的案例文件夹找到抛光案例:
C:/RoboDK/Examples/Plugin-Inventor-Polishing.rdk.
现在你已经加载了工作站,可以打开Inventor。
绘制Inventor 3D 草图
在Inventor 中打开3D物体。在本例中,3D物体是一个需要抛光的外表面呈弧形的独木舟。
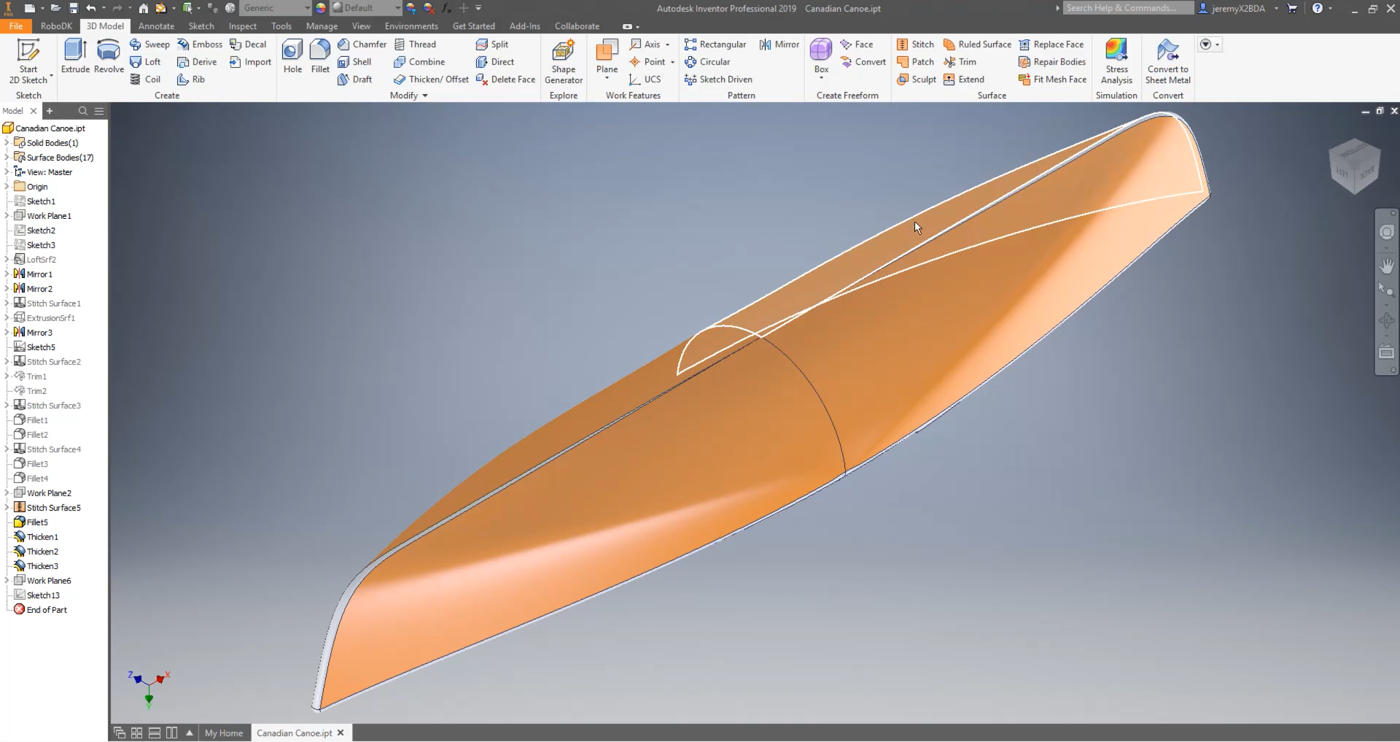
本项目目标是在曲面上创建并导入一条抛光路径。该路径将以上下运动的方式抛光零件的第一部分。
核心目标:在45°斜平面上创建往复运动路径,并投影至曲面
在本例中,RoboDK 已经绘制了路径。如下图所示,你可以右击左侧菜单中的Sketch13➔ Visibility,使其可见。
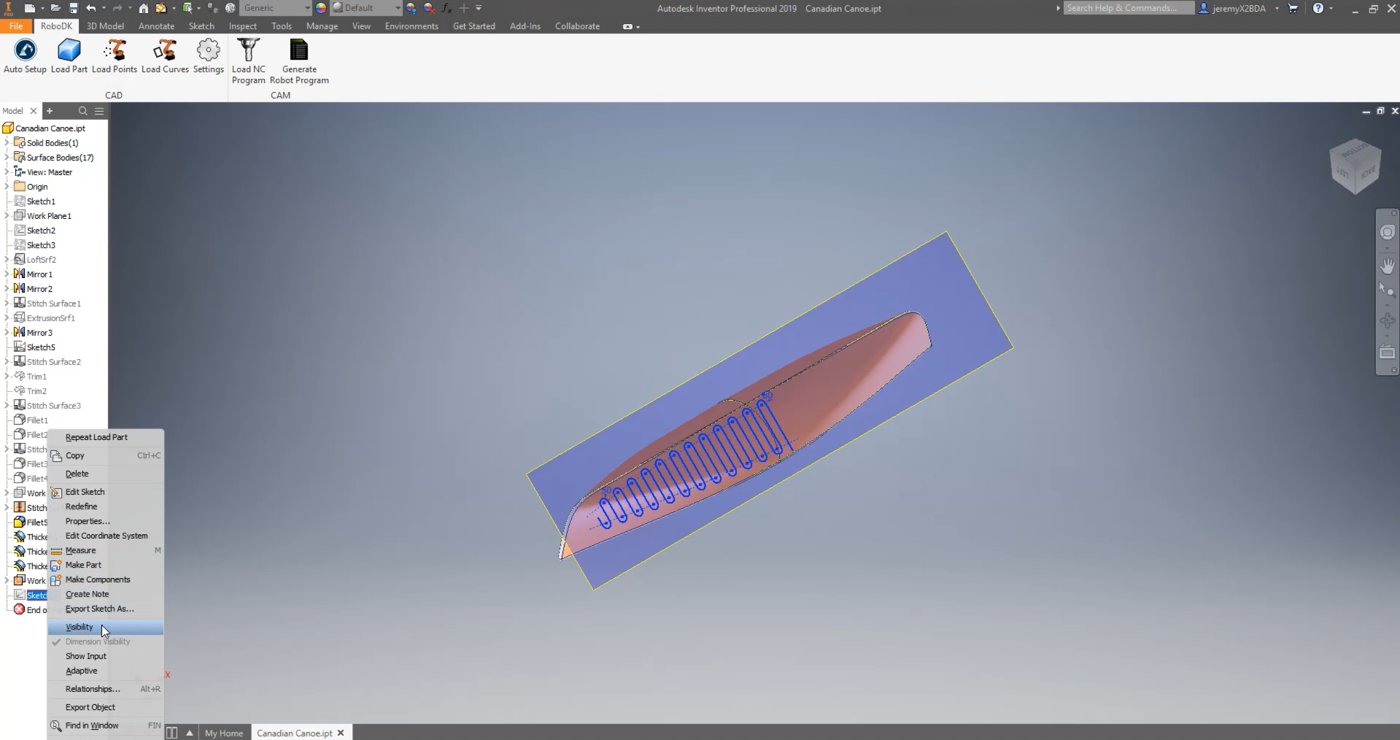
如图所示,路径覆盖了第一个选定部分的全部内容。如果需要,你可以右击Sketch13➔ Edit Sketch,重新打开草图并修改路径。
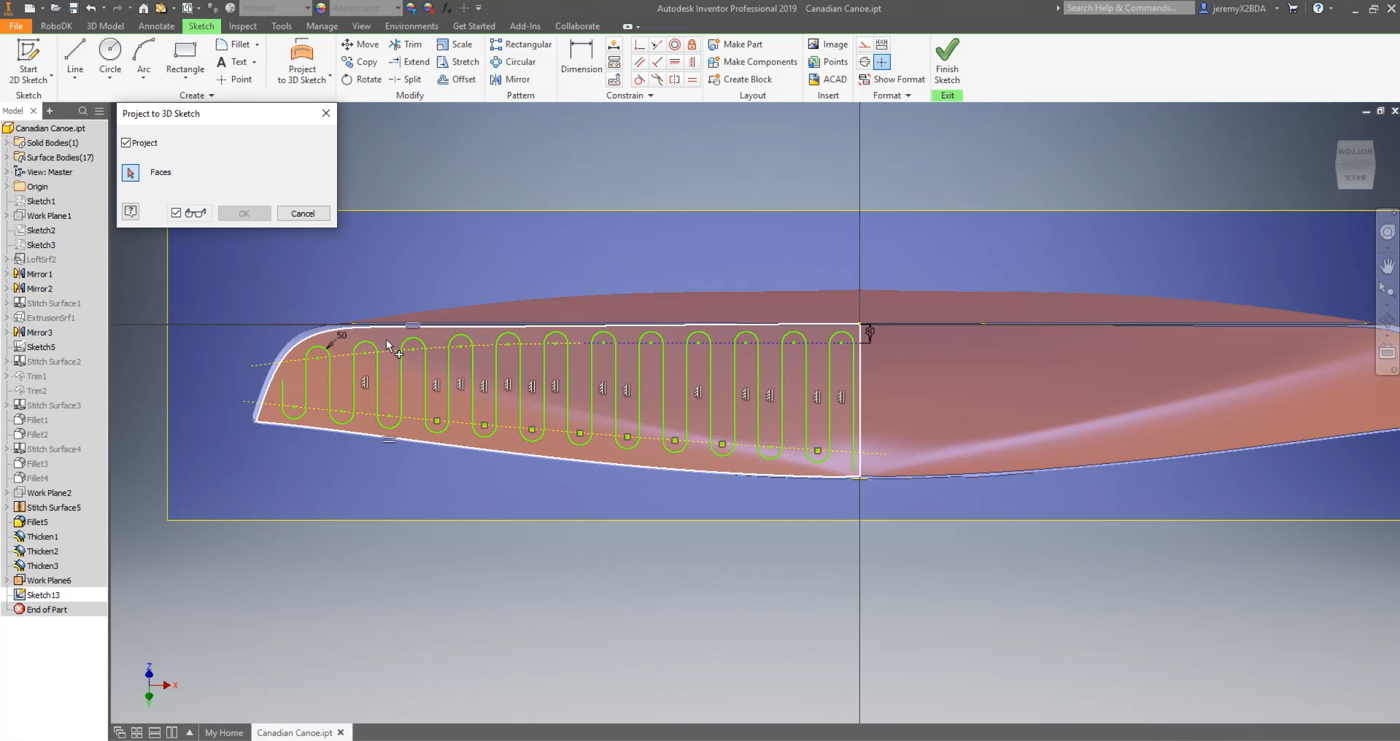
现在,使用 Inventor 工具在表面上投影该路径就很简单了:
1.在 Inventor 中选择选项卡:Sketch,然后选择:Project to 3D Sketch。
2.选择要投射路径:surface。
3.选择OK和Finish Sketch。
完成以上步骤,即会创建 3D 草图。
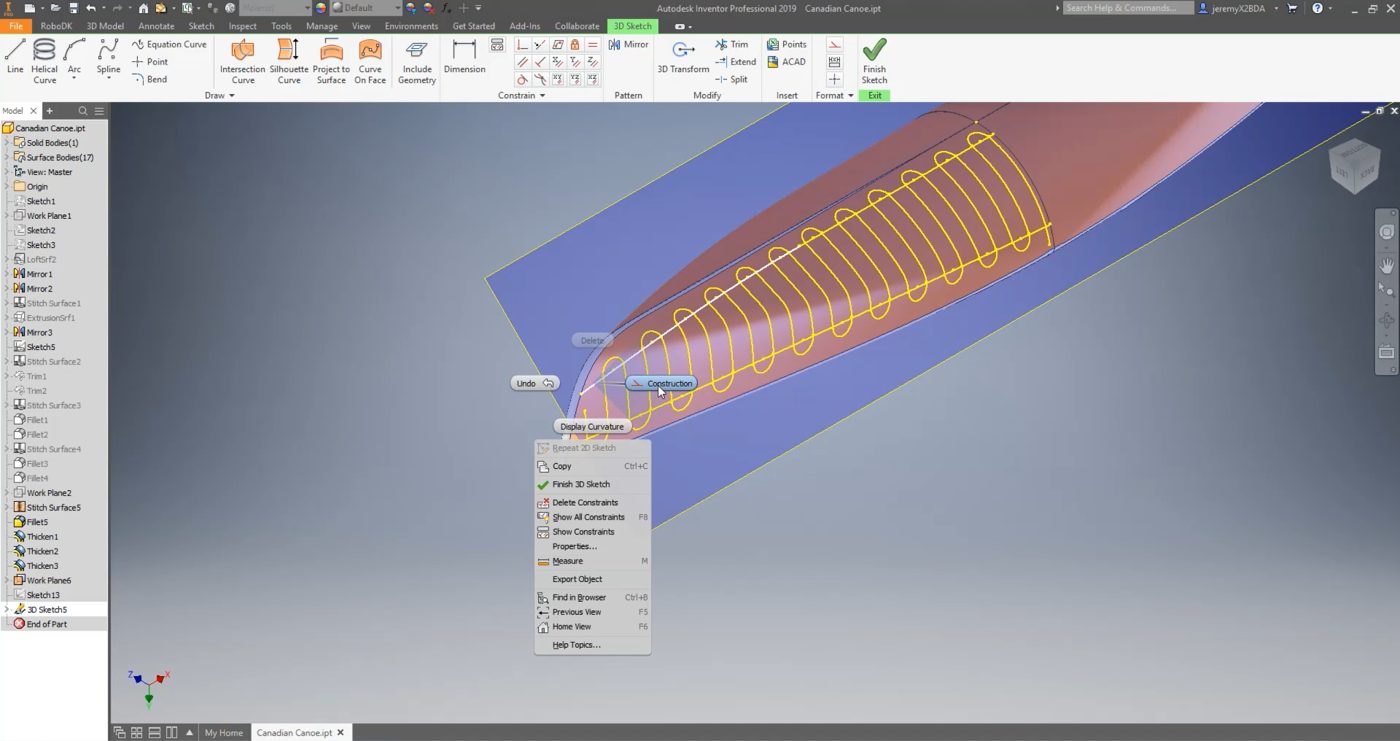
确保创建的施工线是定义正确的施工线:
1.右键点击Sketch13➔ Visibility,使路径可见。
2.右键点击Sketch13➔ Edit 3D Sketch
3.在 3D 模型上选择Line。
4.选择 Construction。
5.选择Finish Sketch。
按照接下来的步骤,将草图导入到 RoboDK:
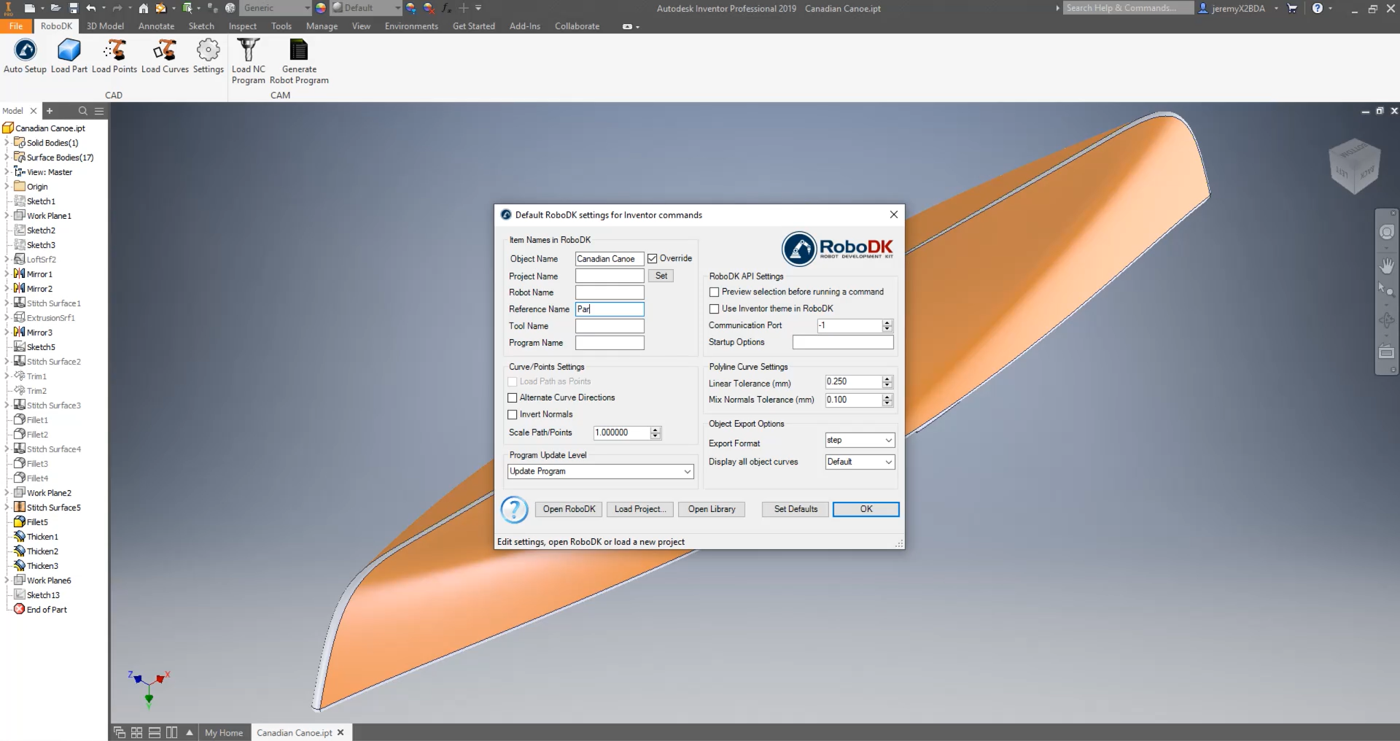
1.在Inventor中,选择RoboDK选项卡,然后选择:
2.输入Object Name。在本例中:Canadian Canoe(加拿大独木舟)。
3.输入要导入零件的Reference Name。在本示例中为零件。如果不提供任何参考系名称,将使用已激活的参考坐标系。如果没有激活的参考坐标系,将自动创建一个新的参考坐标系。
4.关闭窗口:Settings ,或选择OK。
5.选择按钮:
6.选择草图中的线及面后点击OK。此步骤至关重要,它将为RoboDK提供计算曲面法向量的必要数据,从而精确确定抛光工具在曲面上的空间姿态。
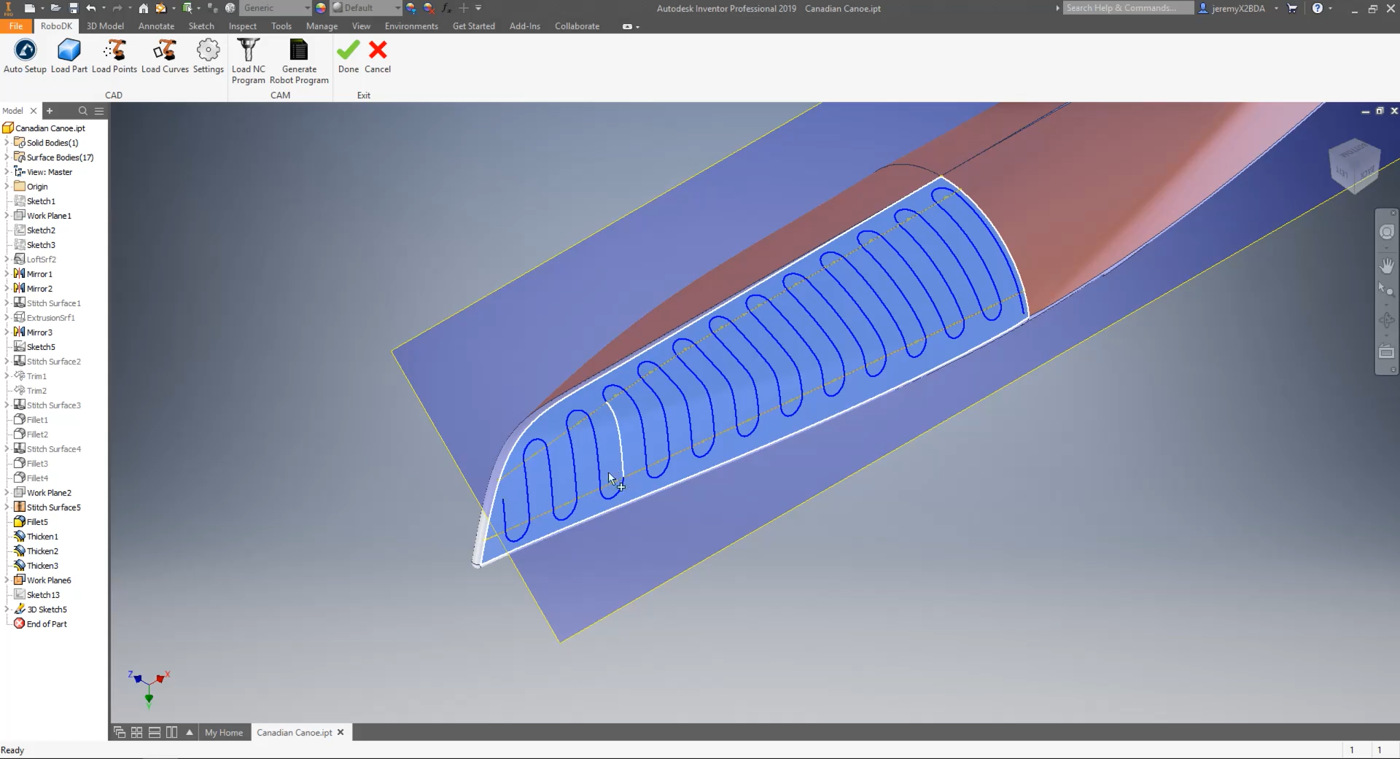
7.选择
在激活参考坐标系(部件)上,你应该可以看到RoboDK 中加载的部件(加拿大独木舟)和路径(抛光路径 1)。
工作站设置
下一步是通过选择
Note:类似本项目这样较为复杂的项目,建议取消选中曲线跟踪项目的自动更新选项,因为每次更改都要重新计算路径,会减慢设置过程。你可以使用更新按钮进行手动更新。
你可以看到独木舟上的路径上有一些小白线。这些是曲面的法线。在这个示例中,所有的导入似乎都是正确的。
请按照以下步骤设置路径方向:
1.选择;
2.点击选择曲线。
现在你可以看到路径段的执行顺序和方向。如果想改变方向,请右键单击选择:反转方向。
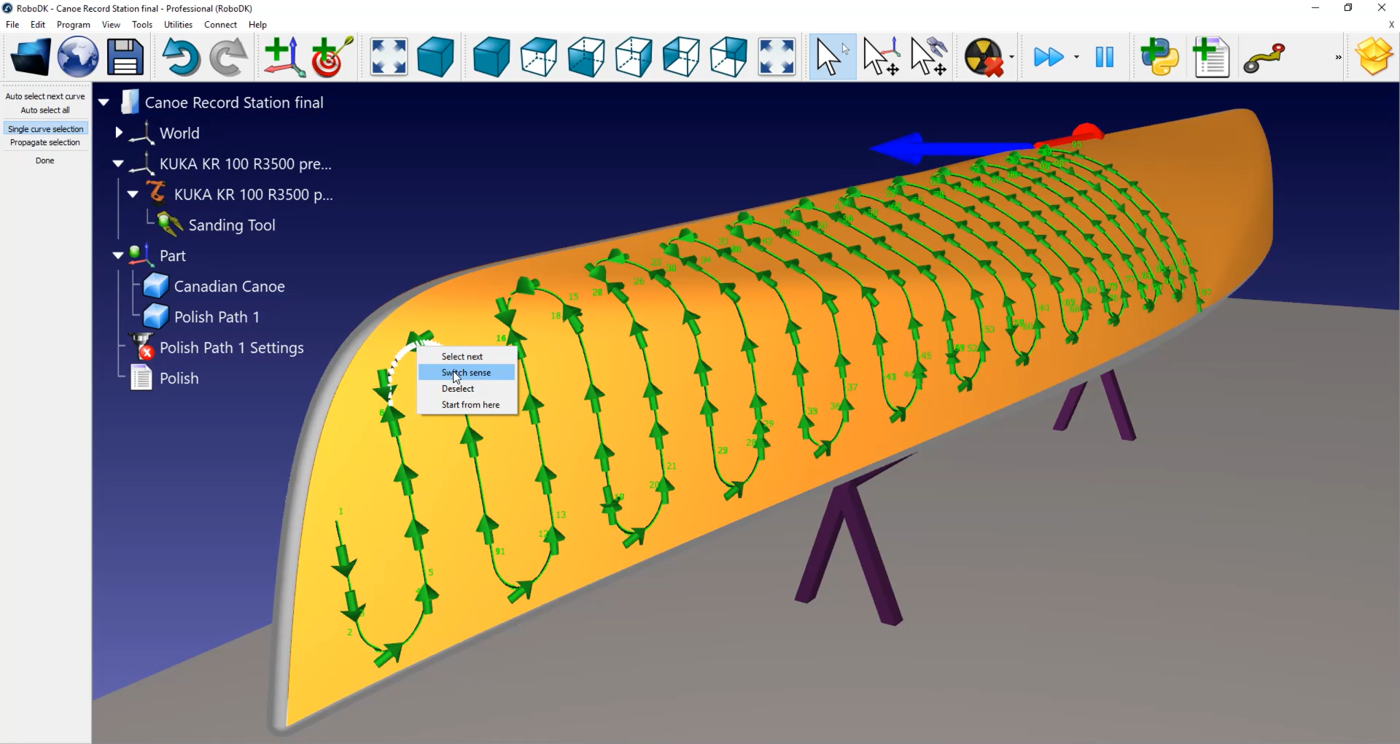
在这种情况下,需要重新铺设路径:
1.在空间站的空白处(即蓝色背景)点击右键。
2.选择:复位选择。
3.选择你要开始的线条。确保它指向正确的方向。
4.选择屏幕左上角:自动选择所有。
5.选择完成。
现在你可以双击:
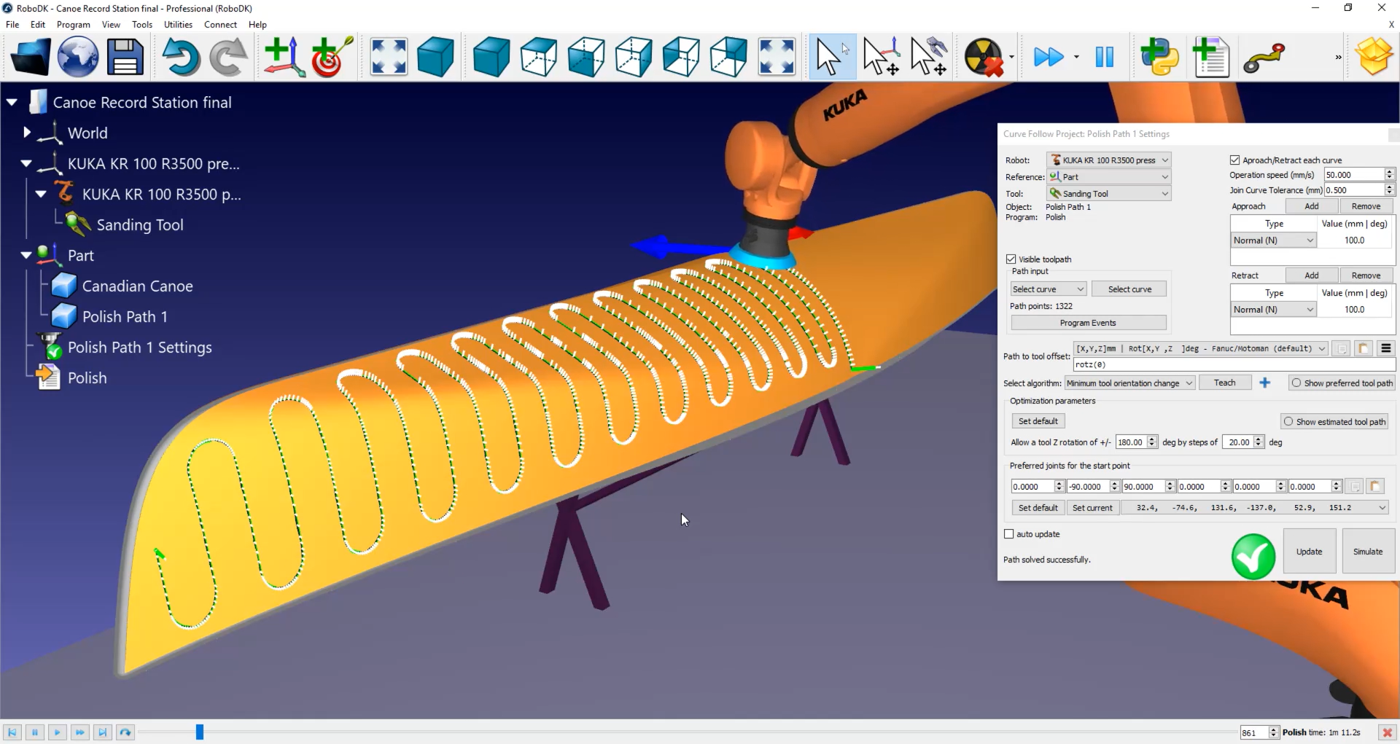
Note:默认情况下,机器人的趋近和退回距离均为 100 毫米。这意味着机器人将降落并开始其路径。但你也可以通过双击
你还可以双击
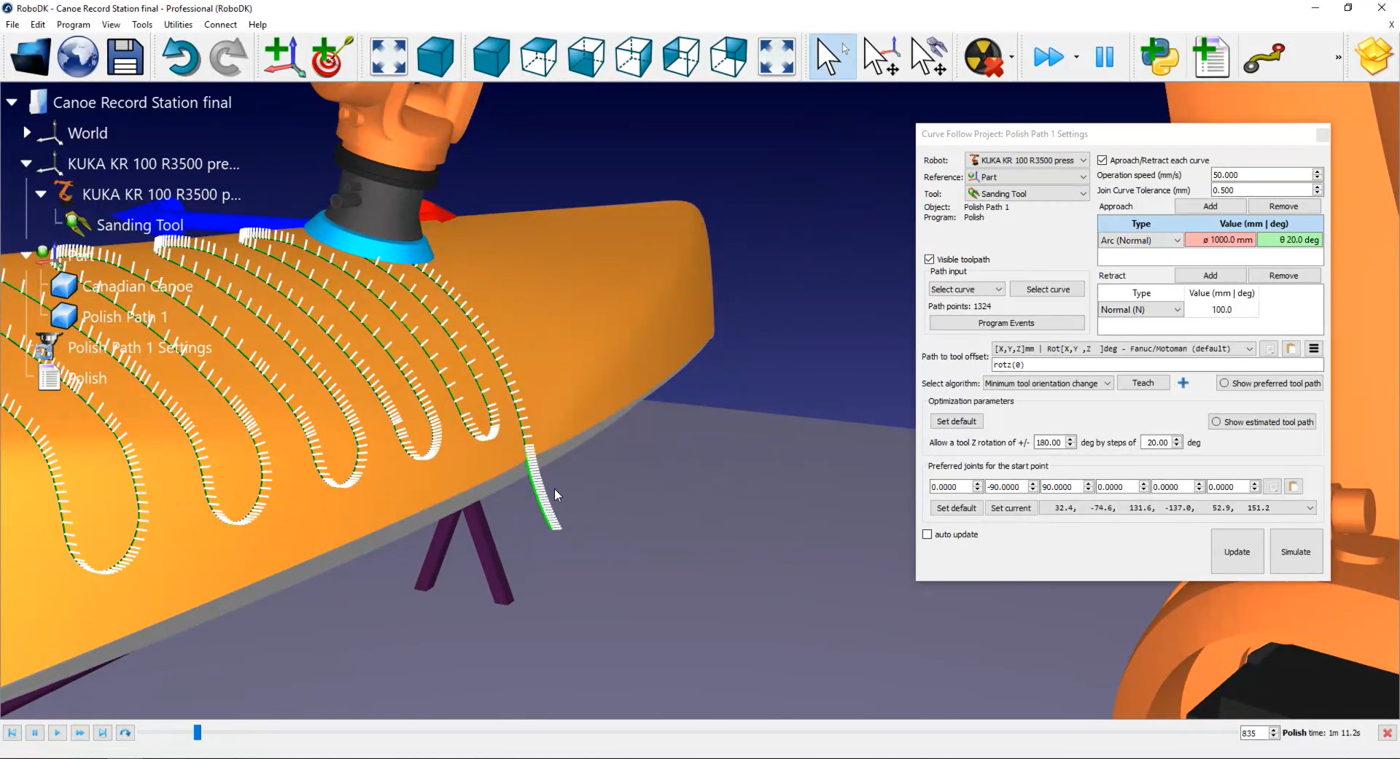
你可以通过选择
在此菜单中,你还可以激活 "设置绕行 "选项。默认情况下,路径上每一条白线都是一个点,会作为机器人需要停止的点发送到机器人控制器。在抛光或砂磨应用中,这并不是最好的做法。
激活设置舍入复选框,以激活控制器中的持续运动选项。根据机器人品牌的不同,该选项的名称可以是 "舍入"、"持续运动 "或 "区域数据"。本例中的值为 0.5mm。
Tip:你可以在此菜单中管理与路径相关的输出激活工具
Tip:可以通过修改操作速度来修改抛光速度。双击
在本例中,由于我们使用的是库卡(Kuka)机器人,因此在生成机器人程序时,你将获得一个SRC文件。库卡(Kuka)控制器可以读取该文件。
请按照以下步骤生成机器人程序:
1.右键点击程序
2.选择:确定。
3.右键点击程序