Navigation offcanvas
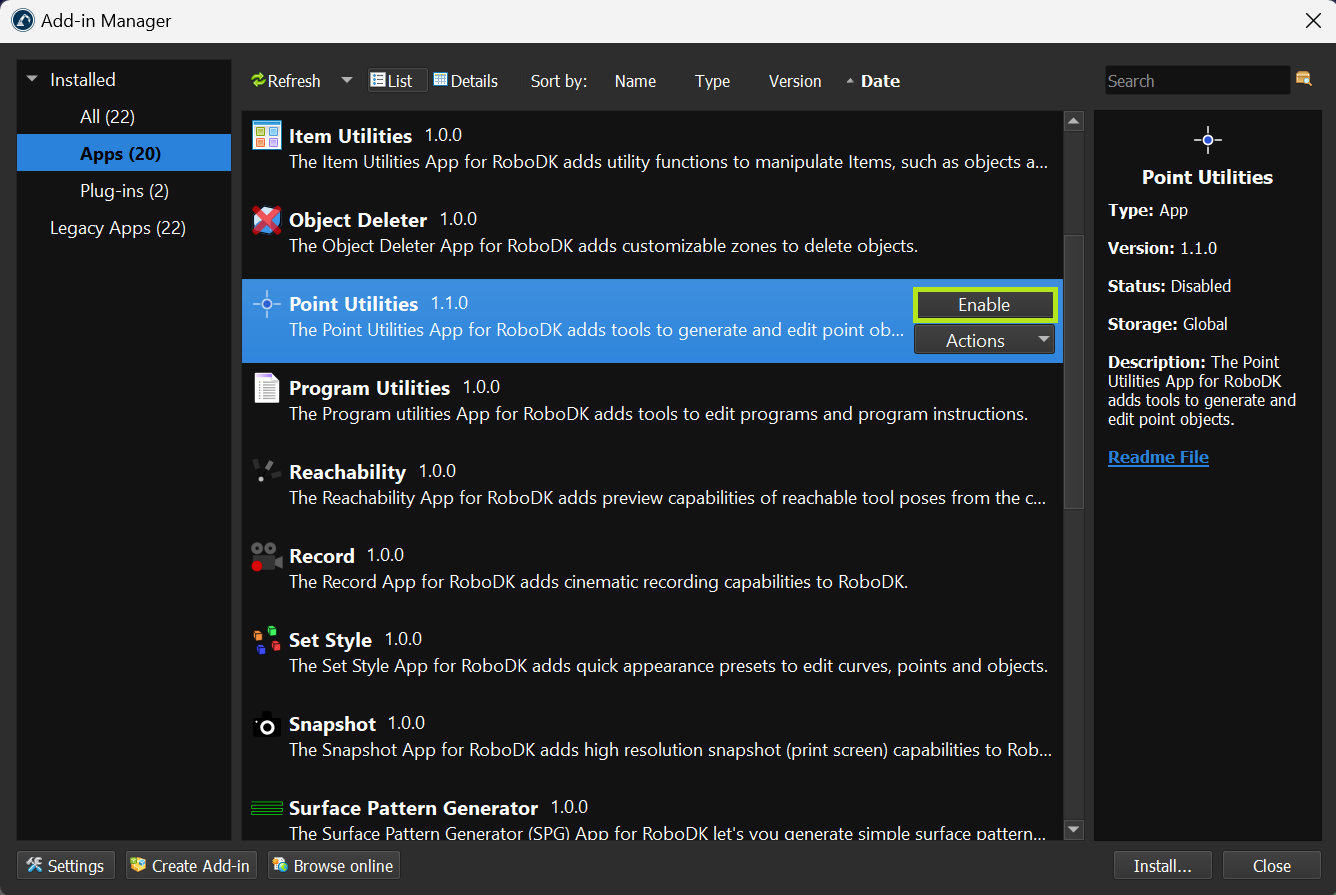
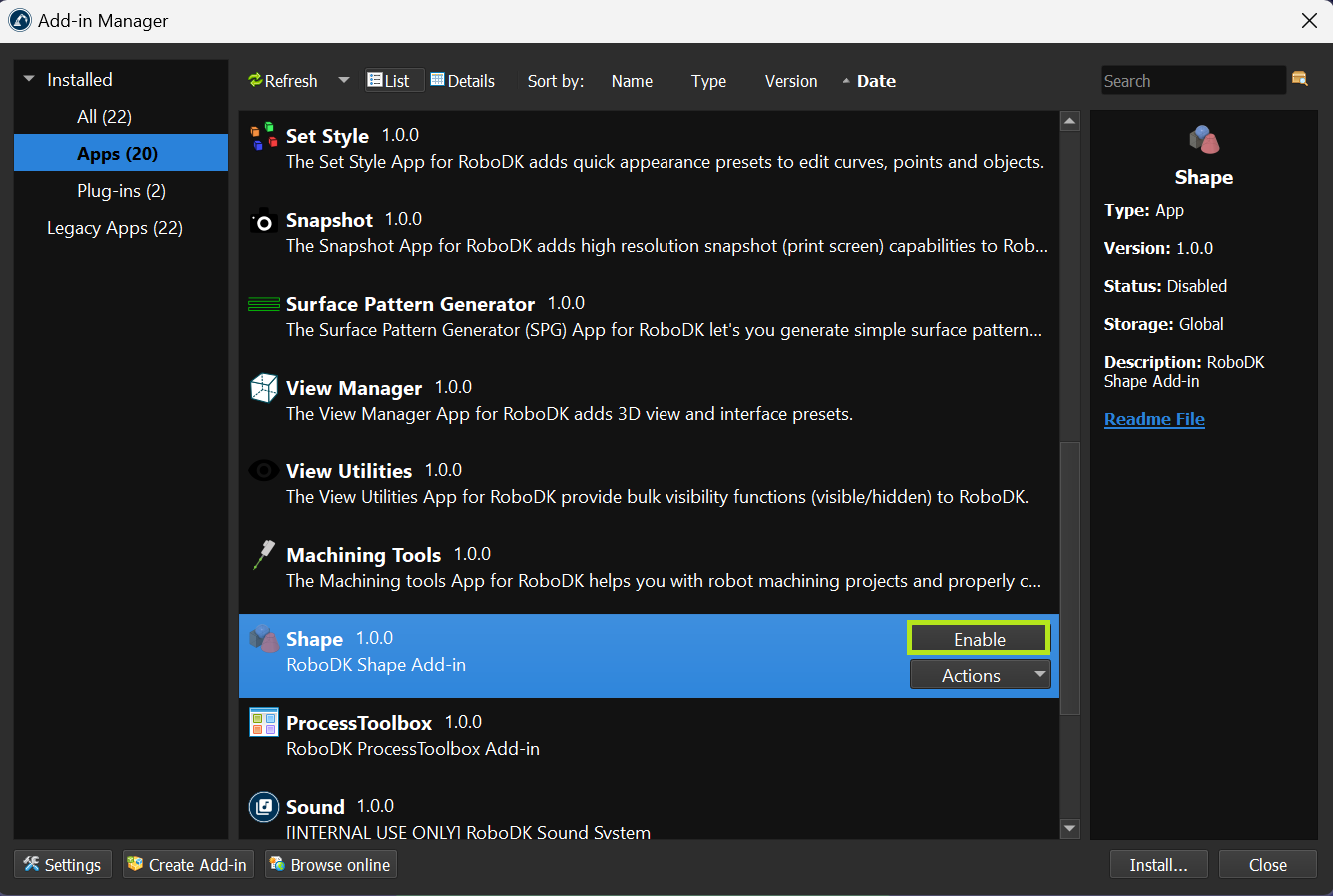
请使用RoboDK v5.5.4或更高版本创建点焊案例。此版本需要包含这两个插件:Point Utilities和Componets,可简化点焊项目创建流程。