生成点焊位置
本节说明如何在车身框架上定义焊点的位置。
假设需要对车架前后部进行点焊,那么我们可以用RoboDK的插件:Point Utilities,可以直接在3D模型的表面上“点”出这些焊点。插件的一个作用就是可以将点转换为目标点后,重新对齐目标点的姿态,使得TCP的方向与焊点表面法向一致或满足工艺要求:
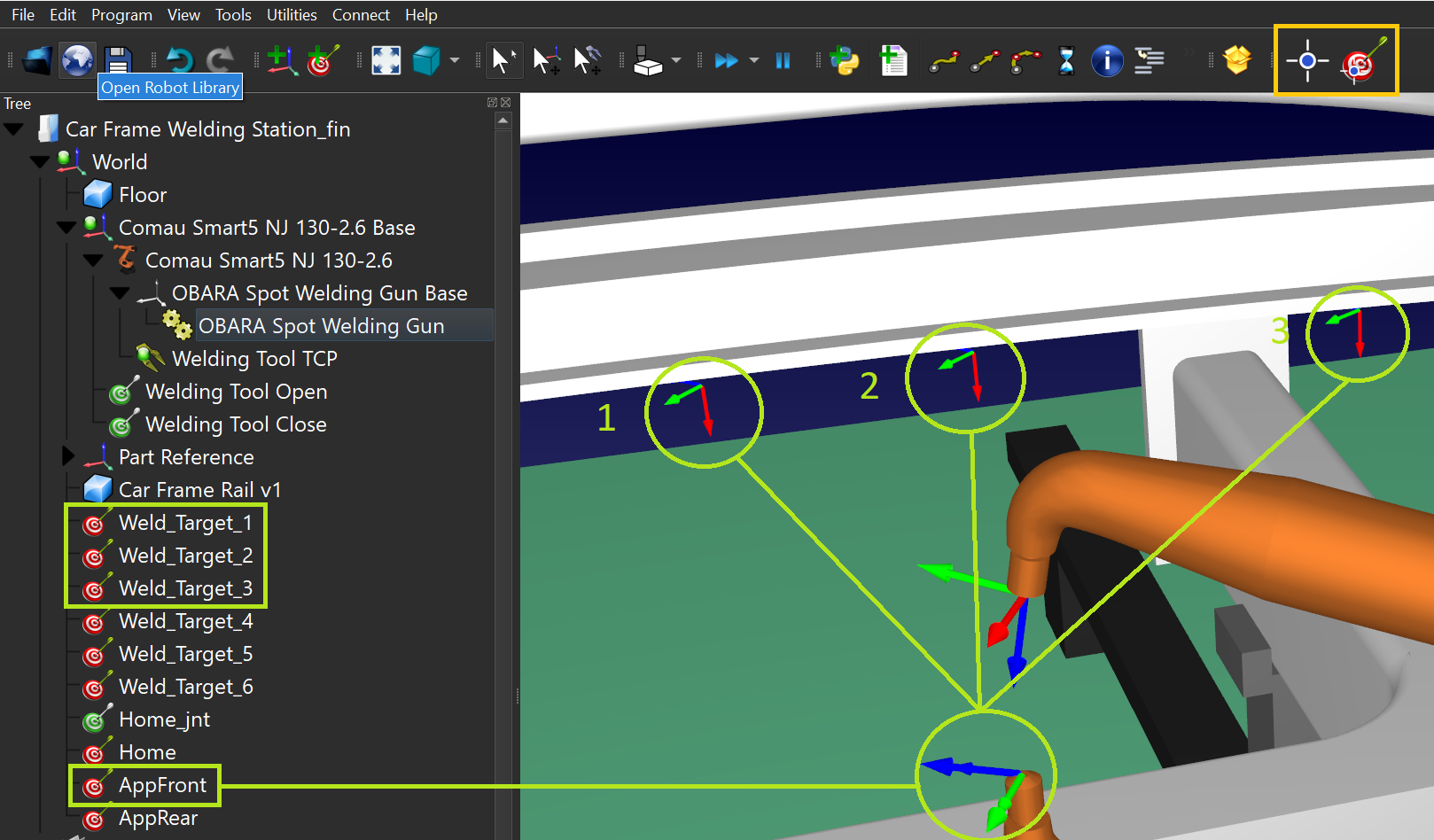
Note:需在模型上创建几何特征(通过测量工具识别的特征)来精确定位焊点。
本节说明如何在车身框架上定义焊点的位置。
假设需要对车架前后部进行点焊,那么我们可以用RoboDK的插件:Point Utilities,可以直接在3D模型的表面上“点”出这些焊点。插件的一个作用就是可以将点转换为目标点后,重新对齐目标点的姿态,使得TCP的方向与焊点表面法向一致或满足工艺要求:
Note:需在模型上创建几何特征(通过测量工具识别的特征)来精确定位焊点。