本节介绍添加点焊钳模型及创建工具中心点(TCP)。
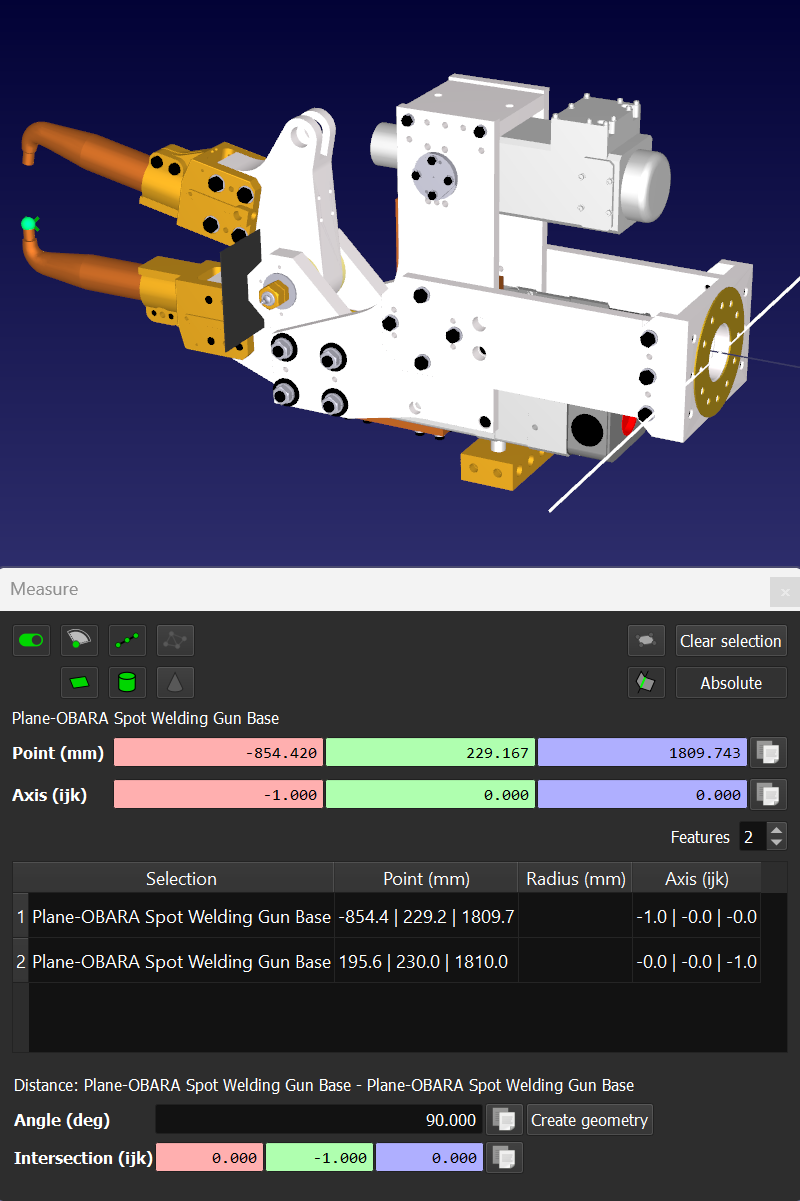
首先要在仿真环境里放置一个焊钳模型,模型要有可动的夹紧部分,这样才能表现开合动作,并单独安装机构。那么我们可以通过菜单中的工具-测量,打开测量窗口,测量TCP相对于法兰的位置。
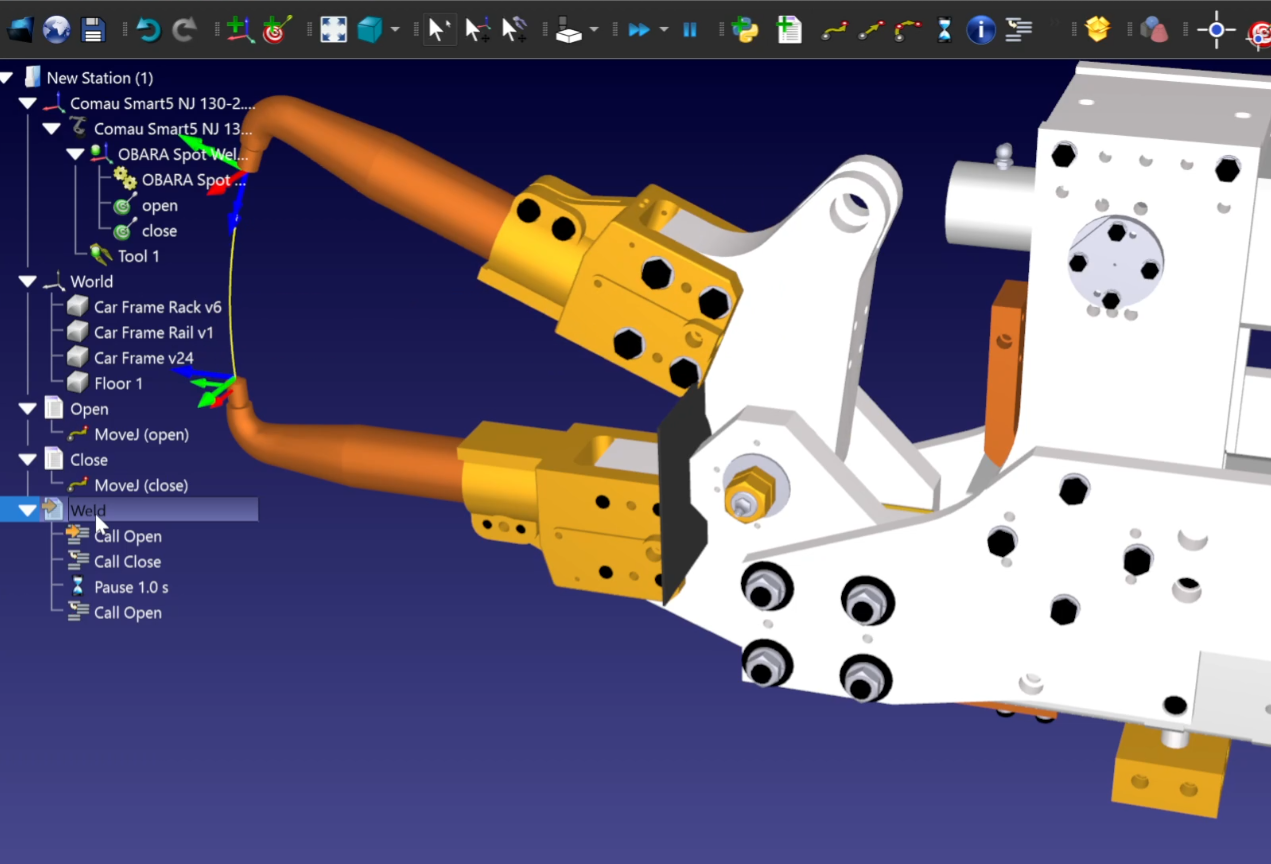
然后我们需要创建两个关节目标来控制焊枪开合状态,一个目标是焊钳打开的状态,另一个目标是焊钳关闭的状态,这两个目标就是不同的关节角度位置,用于模拟点焊过程:
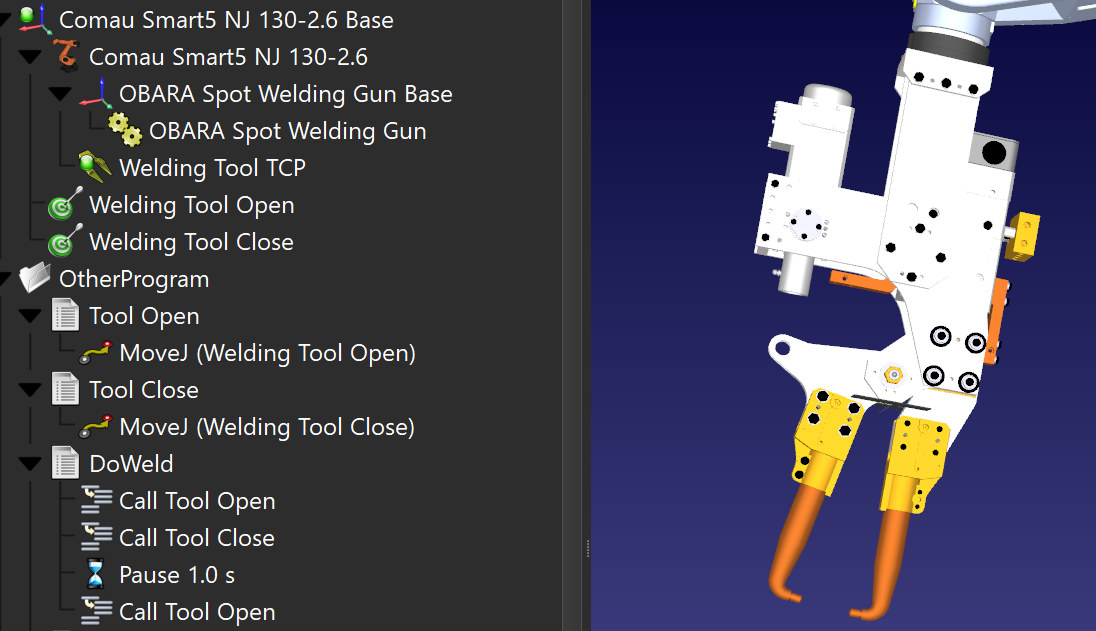
Note:这些关节目标和程序应关联至OBARA焊枪机械结构。
Note:可在点焊程序中添加暂停指令以更贴近实际工艺。