Navigation offcanvas
首先需加载机器人及点焊枪工具。
可到RoboDK资源库下载以下组件:
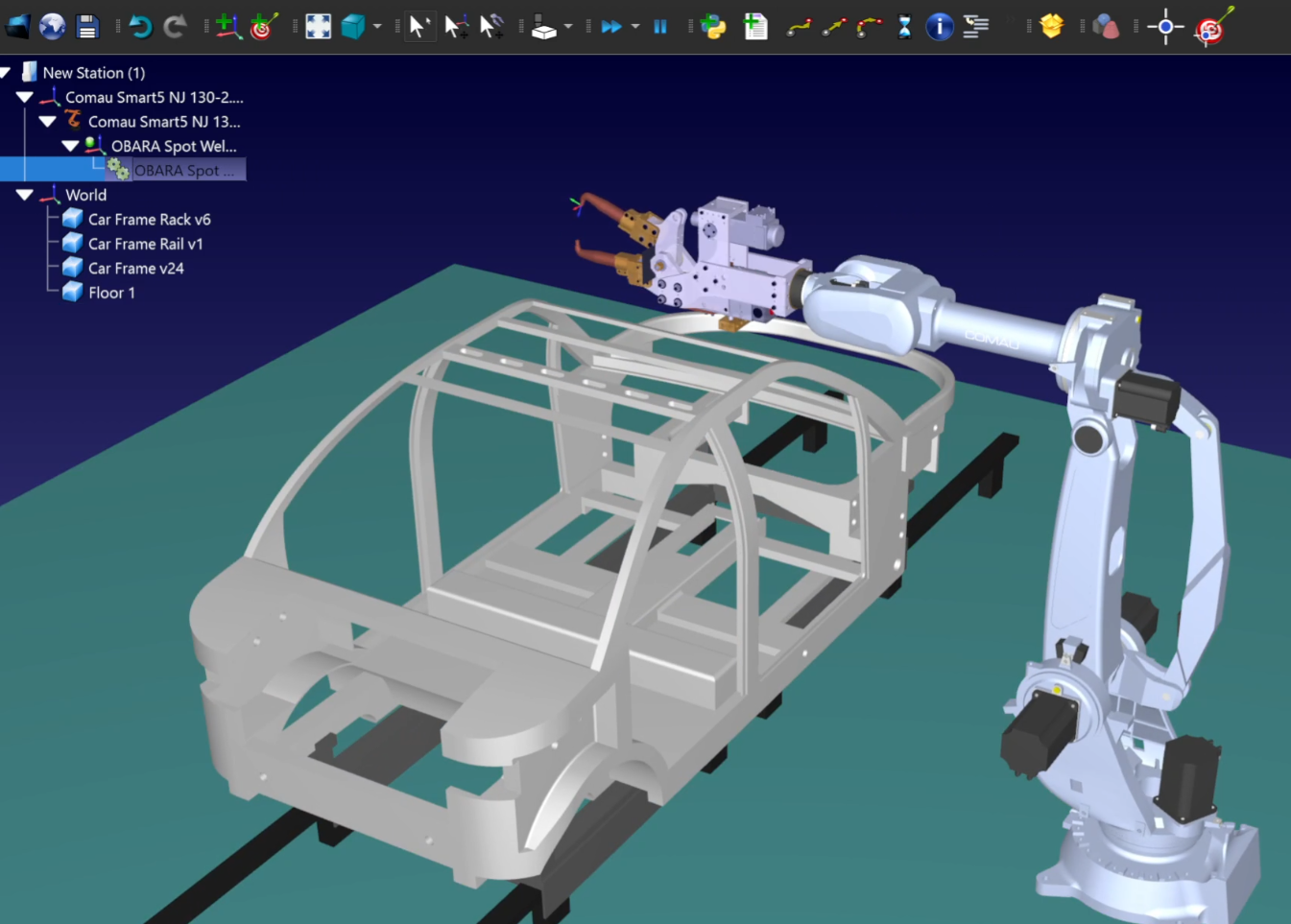
1.机器人:柯马(Comau) Smart5 NJ 130-2.6
2.工具:OBARA 点焊枪
基座与夹具将自动加载本地文件,地面创建可以使用Componets插件。如果有不懂可以查阅入门指南和Components插件帮助文档。
Navigation offcanvas
首先需加载机器人及点焊枪工具。
可到RoboDK资源库下载以下组件:
1.机器人:柯马(Comau) Smart5 NJ 130-2.6
2.工具:OBARA 点焊枪
基座与夹具将自动加载本地文件,地面创建可以使用Componets插件。如果有不懂可以查阅入门指南和Components插件帮助文档。