机器人焊接示例
要完成这个机器人焊接项目,首先从RoboDK默认库中打开机器人焊接示例。然后在SolidWorks中选择待焊接的草图路径。最后,在RoboDK 中调整机器人路径。
设置
首先,应从 SolidWorks 中导入零件和焊接路径。
Tip:更多有关在SolidWorks 导入零件、曲线和点的信息,可以参考这个视频: https://www.youtube.com/watch?v=mF6Fn6HxHJ8。
在SolidWorks 导入项目:
1.进入SolidWorks 的RoboDK 选项卡:Auto Setup。
2.选择:welding paths。确保同时选择面,因为它们有助于确定机器人工具的方向。
3.现在您已经从 SolidWorks 中导入了路径,此时可以打开RoboDK界面。
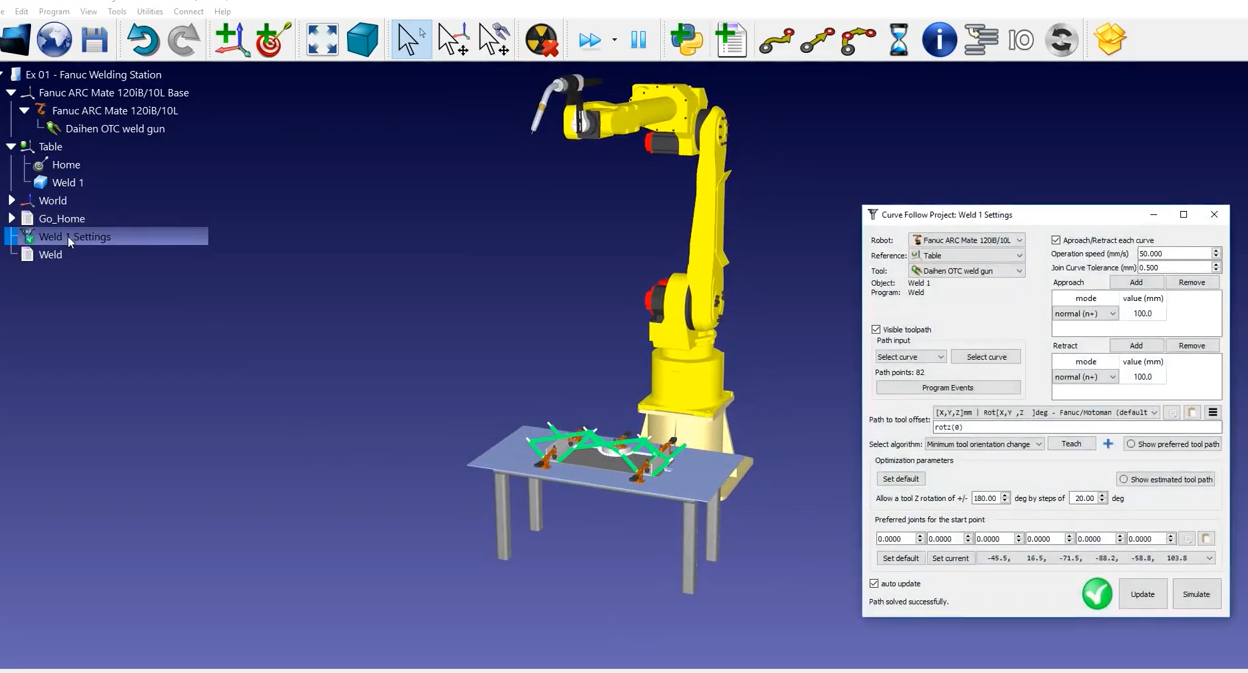
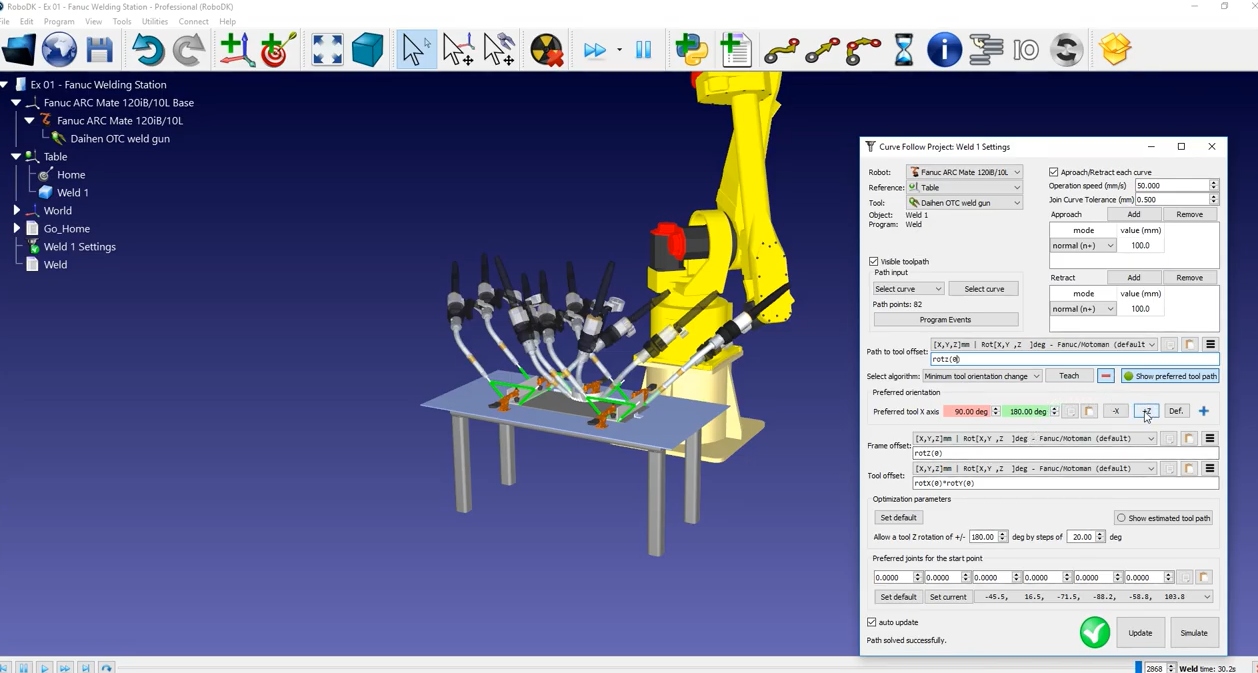
4.在工作站中,双击Weld1 Settings,即可打开曲线跟踪项目面板。
5.单击更新生成程序,然后点击模拟。
焊接路径精细化调整
在本节中,您将学习如何改进或自定义每条焊接曲线的运动顺序。焊接枪正在按照应有的路径进行焊接。不过,我们可以看到方向有点偏离,而且路径也远非最佳。
首先,您应该修复路径本身:
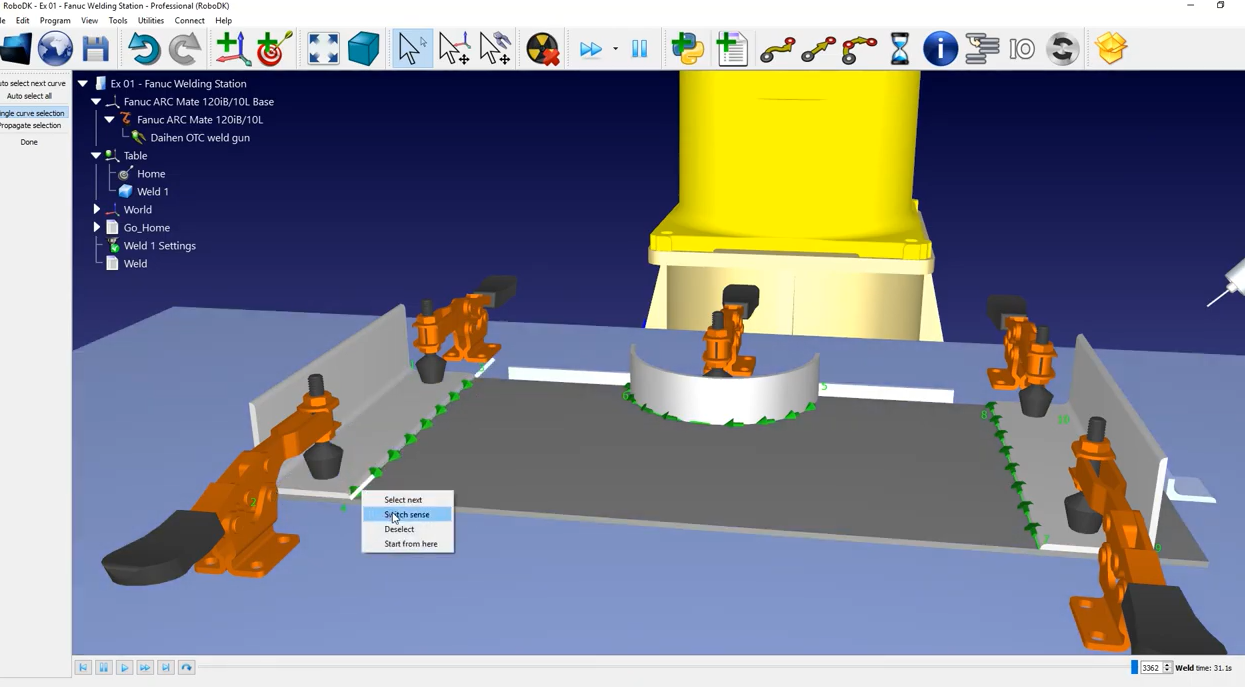
1.在曲线追踪项目面板,点击:选择曲线,然后在模型上点击路径从 1 到 2,然后从 3 到 4,从 5 到 6,从 7 到 8,从 9 到 10。
2.从焊接部分来看,路径顺序是合理的。但是,焊接方向似乎并不合理。
3.要转换焊接路径的方向(如路径 3 到 4),请右键单击该路径,选择:反转方向。这样可以看到该路径的箭头改变了方向。
4.路径 5 到路径 6 和路径 7 到路径 8 也是如此。
5.修改完成后,您可以在右侧窗口选择:完成。
6.然后在曲线跟踪项目窗口,单击更新生成程序,单击模拟开始进行仿真。
现在,路径的顺序似乎更合理了,你可以沿着路径调整工具的方向,以更好地改善机器人的运动。
7.在曲线追踪项目窗口中,点击:显示优选的工具路径。这时会展示工具预估的痕迹,向你显示沿路径不同位置的工具方向。
8.尝试调整Z轴路径偏移量:手动输入数值或使用鼠标滚轮实时调节。
9.这样做,就可以观察虚拟工具方向的动态变化。
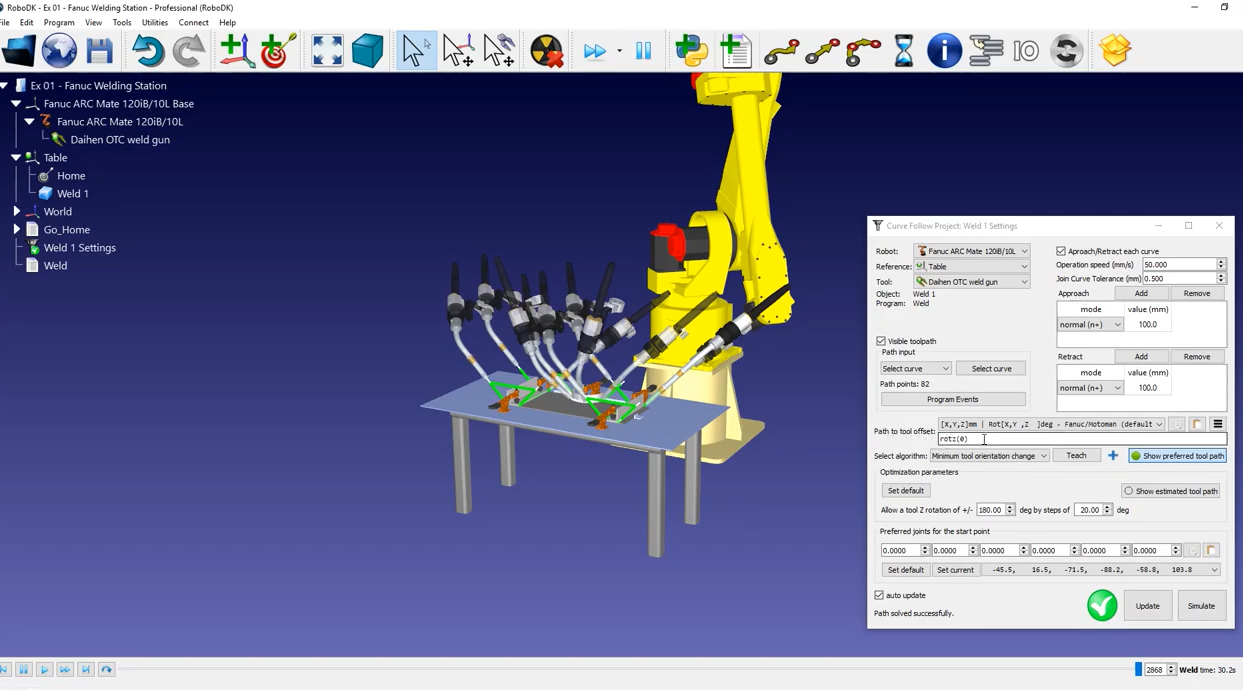
若基础调整无效,可展开高级选项(点击蓝色"+"按钮):
10.将Z轴旋转值(rotz)重置为0,点击+Z按钮
11.正如您使用虚拟工具所看到的,机器人凸缘将始终位于零件顶部。再次单击:更新,然后单击;模拟 来模拟结果。
12.如果使用滚动条,新的工具方向有利于工具的线缆管理;没有干扰机器人的风险。
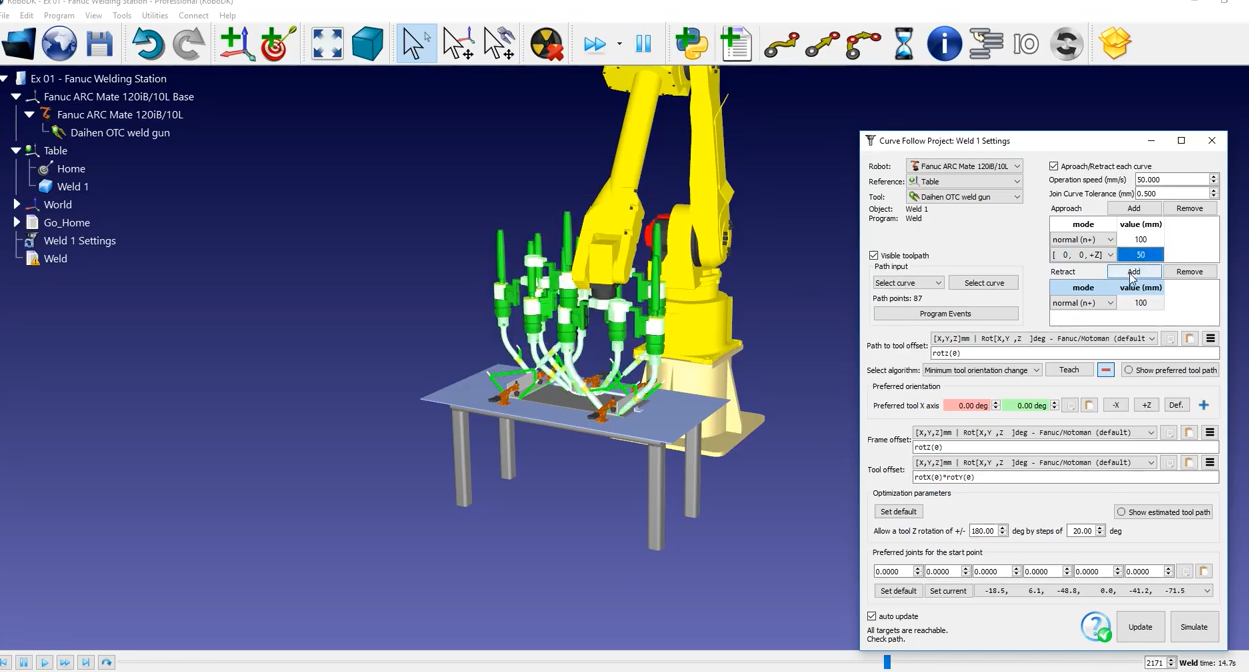
趋近和退回运动对于避免工具和工件之间的碰撞尤为重要。曲线追踪项目会自动为每条焊接路径创建进刀和退刀动作。为预防工具与工件碰撞,系统默认生成垂直路径的100mm进退刀。推荐改进方案:。
方案A:将进退刀距离增至200mm(保持垂直方向)
方案B:添加Z轴方向辅助移动(需在坐标系中设置):
1.恢复默认100mm垂直进退刀。
1.例如,沿Z 方向添加一个动作。
2.设置为 50 毫米。
3.完成后点击:更新和模拟。
4.最终路径将先垂直退出,再垂直抬升