设置
首先,应从 SolidWorks 中导入零件和焊接路径。
Tip:更多有关在SolidWorks 导入零件、曲线和点的信息,可以参考这个视频: https://www.youtube.com/watch?v=mF6Fn6HxHJ8。
在SolidWorks 导入项目:
1.进入SolidWorks 的RoboDK 选项卡:Auto Setup。
2.选择:welding paths。确保同时选择面,因为它们有助于确定机器人工具的方向。
3.现在您已经从 SolidWorks 中导入了路径,此时可以打开RoboDK界面。
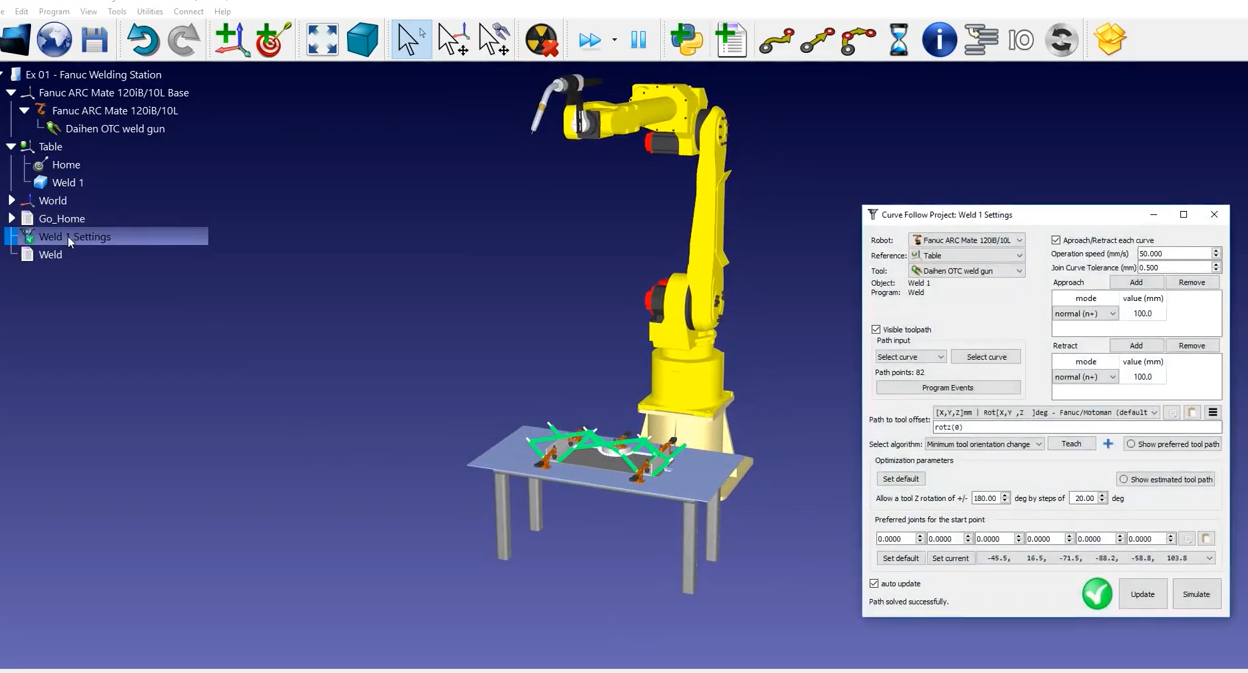
4.在工作站中,双击Weld1 Settings,即可打开曲线跟踪项目面板。
5.单击更新生成程序,然后点击模拟。