导入模型
首先,我们需要在Fusion 360 中导入零件和焊接路径。
Tip:更多有关如何在Fusion 导入零件、曲线和点,请参考此视频:https://www.youtube.com/watch?v=gxob-94fNLo。
在Fusion360 导入模型:
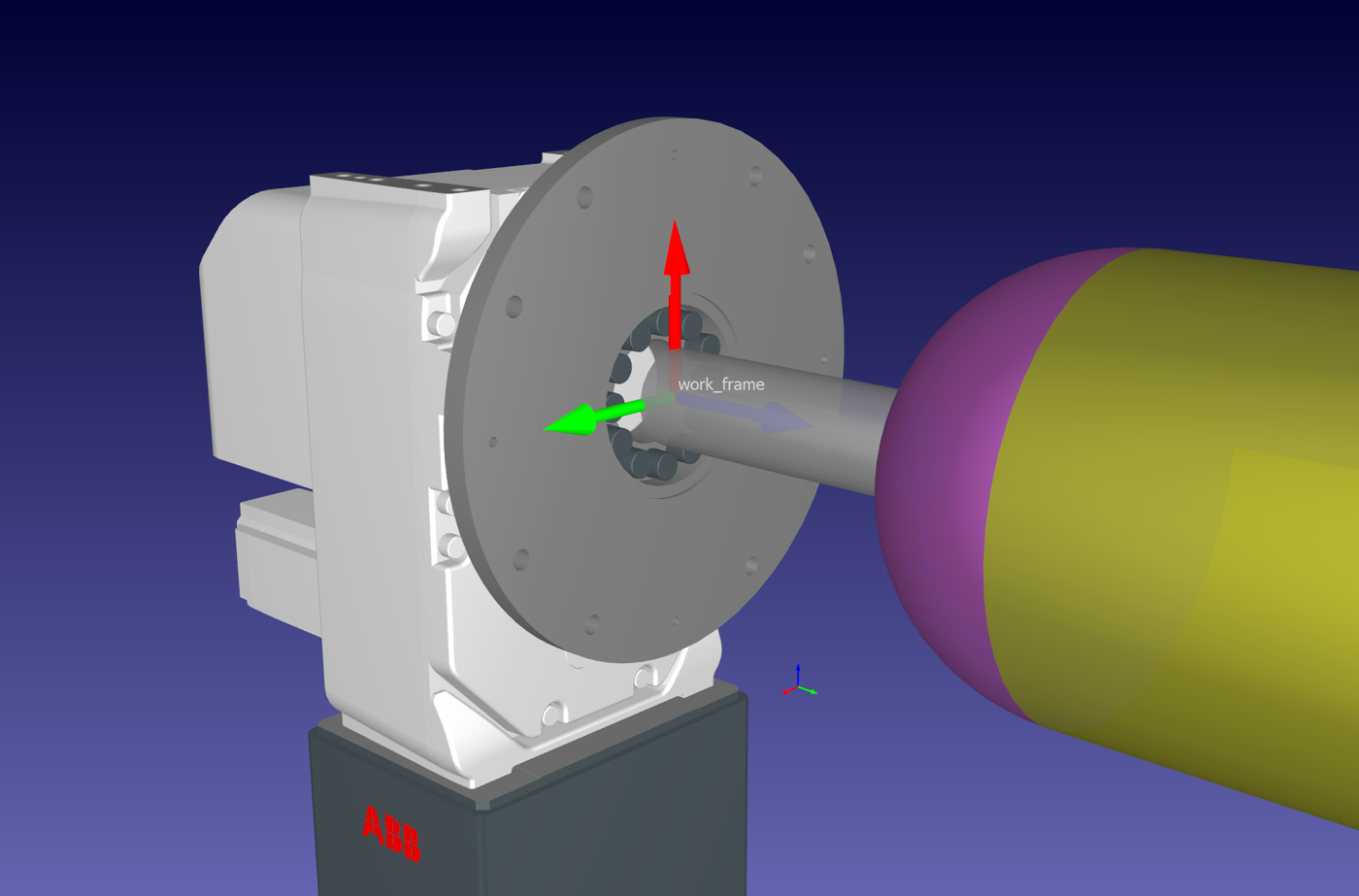
1.在RoboDK中选中定位器法兰坐标系(用于定位储罐)
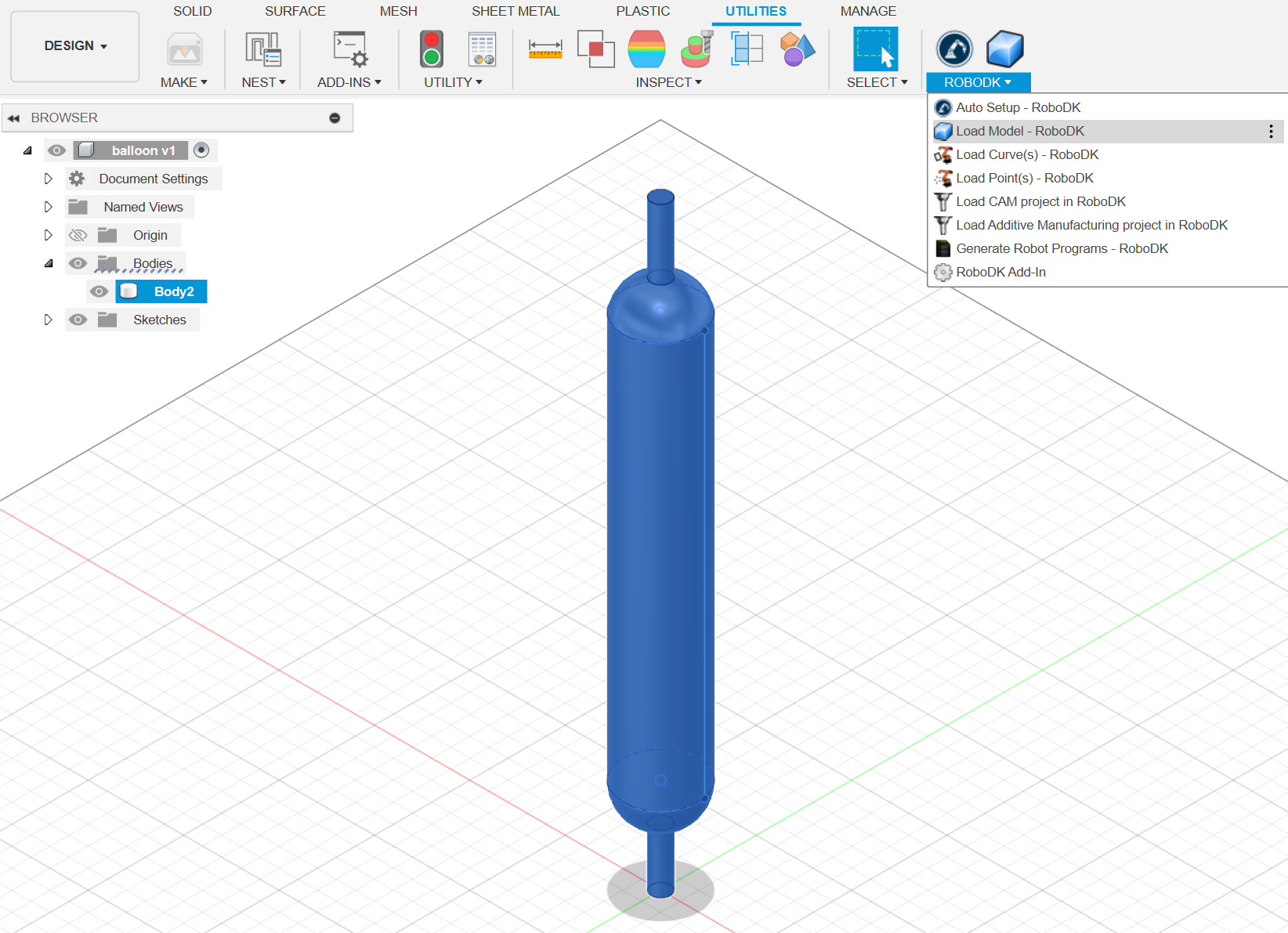
2.进入Fusion 360 ,选择工具栏UTILITIES的RoboDK 选项卡,选择按钮:Load Model-RoboDK。
3.检查油罐模型位置,并重新命名。
首先,我们需要在Fusion 360 中导入零件和焊接路径。
Tip:更多有关如何在Fusion 导入零件、曲线和点,请参考此视频:https://www.youtube.com/watch?v=gxob-94fNLo。
在Fusion360 导入模型:
1.在RoboDK中选中定位器法兰坐标系(用于定位储罐)
2.进入Fusion 360 ,选择工具栏UTILITIES的RoboDK 选项卡,选择按钮:Load Model-RoboDK。
3.检查油罐模型位置,并重新命名。