Navigation offcanvas
导入模型后,需要导入焊接路径。
导入路径步骤:
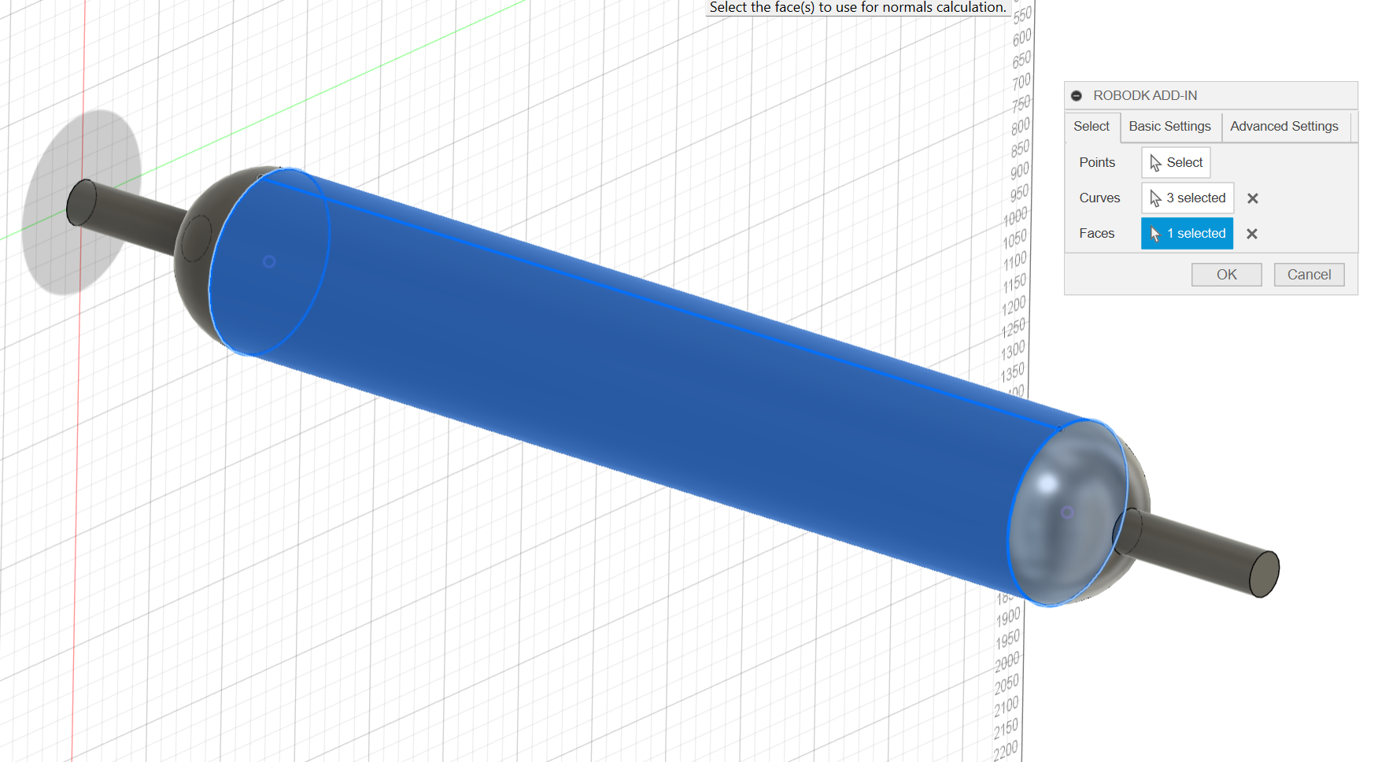
1.选择焊接路径时需同步选中相邻曲面(用于确定工具姿态)。
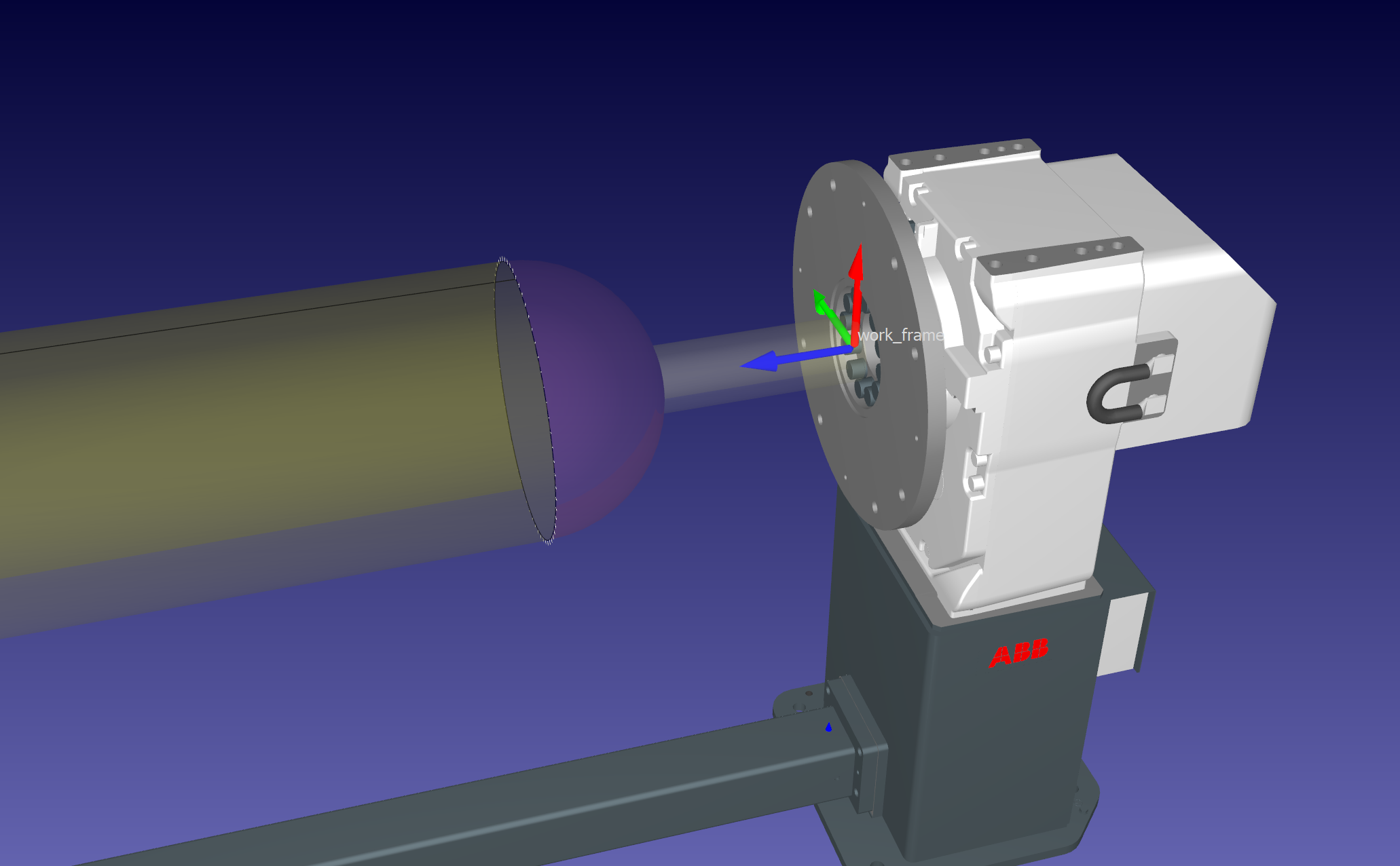
2.现在,你已经从Fusion 360 中导入了路径,那么可以打开RoboDK软件。
3.导入后校验路径位置并重命名。